
Criando seu programa de teste (C++/Java)
Assim que tudo estiver instalado, estamos prontos para criar um programa de robô. O WPILib vem com vários modelos para programas de robô. O uso desses modelos é altamente recomendado para novos usuários; no entanto, usuários avançados têm a liberdade de escrever seu próprio código de robô do zero. Este artigo guia você na criação de um projeto a partir de um dos exemplos fornecidos, que já possui algum código escrito para controlar um robô básico.
Este guia inclui exemplos de código que envolvem hardware do fornecedor para a conveniência do usuário. Neste documento, PWM refere-se ao controlador de motor incluído no KOP. A guia CTRE faz referência ao controlador de motor Talon FX (motor Falcon 500), mas o uso é semelhante para TalonSRX e VictorSPX. A guia REV faz referência ao CAN SPARK MAX controlando um motor sem escova, mas é semelhante para motor com escovas. Parte-se do pressuposto de que o usuário já instalou os vendordeps necessários e configurou o(s) dispositivo(s) (atualização de firmware, atribuição de IDs CAN, etc.) de acordo com a documentação do fabricante (CTRE REV).
Criando um novo projeto WPILib
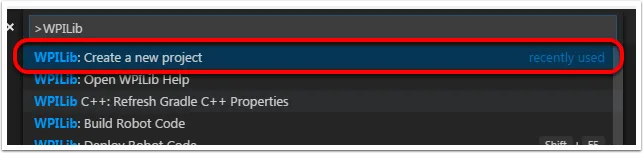
Abra a paleta de comandos do Visual Studio Code com Ctrl+Shift+P. Em seguida, digite "WPILib" no prompt. Como todos os comandos do WPILib começam com "WPILib", isso mostrará a lista de comandos específicos do WPILib no VS Code. Agora, selecione o comando "Criar um novo projeto".
Isso abrirá a "Janela do Criador de Novo Projeto:".
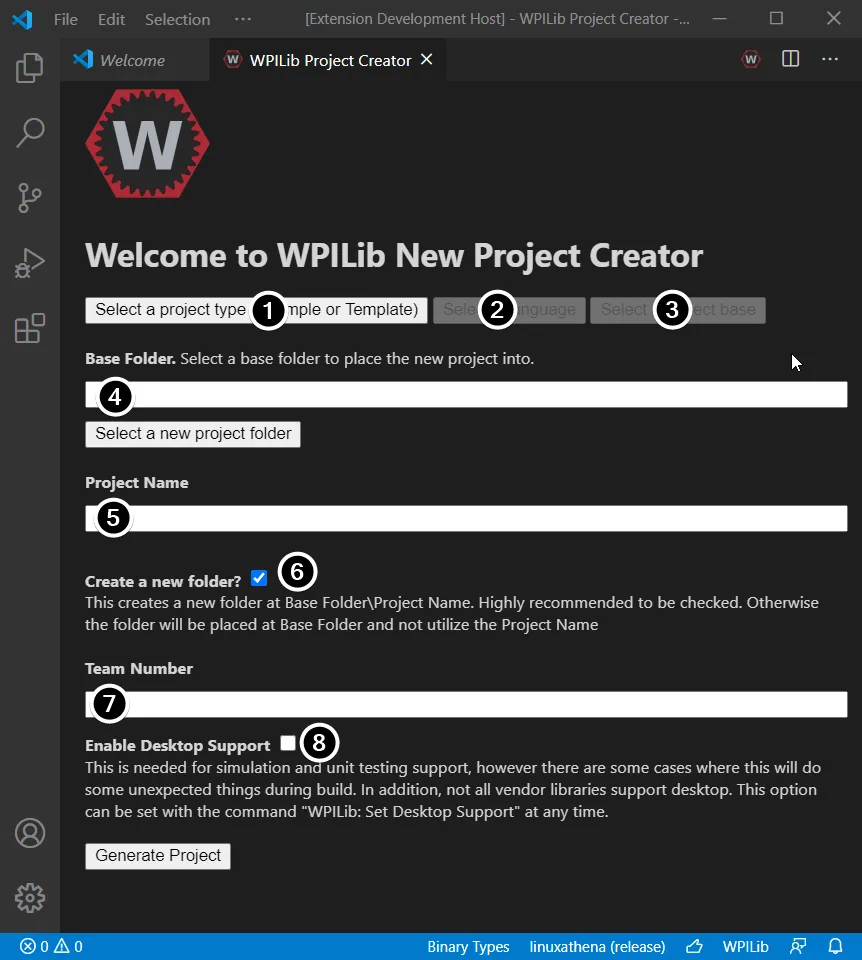
Os elementos da "Janela do Criador de Novo Projeto" são explicados abaixo:
-
Tipo de Projeto: O tipo de projeto que desejamos criar. Para este exemplo, selecione "Exemplo".
-
Linguagem: Esta é a linguagem (C++ ou Java) que será usada para este projeto.
-
Base do Projeto: Esta caixa é usada para selecionar a classe base ou exemplo a ser gerado para o projeto. Para este exemplo, selecione "Início Rápido" (Getting Started).
-
Pasta Base: Isso determina a pasta na qual o projeto do robô será localizado.
-
Nome do Projeto: O nome do projeto do robô. Isso também especifica o nome que será dado à pasta do projeto se a caixa "Criar Nova Pasta" estiver marcada.
-
Criar Nova Pasta: Se esta opção estiver marcada, será criada uma nova pasta para armazenar o projeto dentro da pasta especificada anteriormente. Se não estiver marcada, o projeto será localizado diretamente na pasta especificada anteriormente. Um erro será gerado se a pasta não estiver vazia e esta opção não estiver marcada.
-
Número da Equipe: O número da equipe para o projeto, que será usado para os nomes de pacotes dentro do projeto e para localizar o robô ao implantar o código.
-
Habilitar Suporte de Desktop: Ativa os testes de unidade e a simulação. Embora o WPILib suporte isso, bibliotecas de software de terceiros podem não oferecer suporte a isso. Se as bibliotecas não suportarem desktop, seu código pode não compilar ou pode travar. Deve ser deixado desmarcado, a menos que os testes de unidade ou a simulação sejam necessários e todas as bibliotecas o suportem. Para este exemplo, não marque esta caixa.
Depois de configurar todos os itens acima, clique em "Gerar Projeto" e o projeto do robô será criado.
Quaisquer erros na geração do projeto aparecerão no canto inferior direito da tela.
Abrindo o novo projeto
Após criar com sucesso o seu projeto, o VS Code dará a opção de abrir o projeto, conforme mostrado acima. Podemos optar por fazer isso agora ou mais tarde, digitando Ctrl+K e, em seguida, Ctrl+O (ou apenas Command+O no macOS) e selecionar a pasta onde salvamos nosso projeto.
Clique em "Sim, confio nos autores".
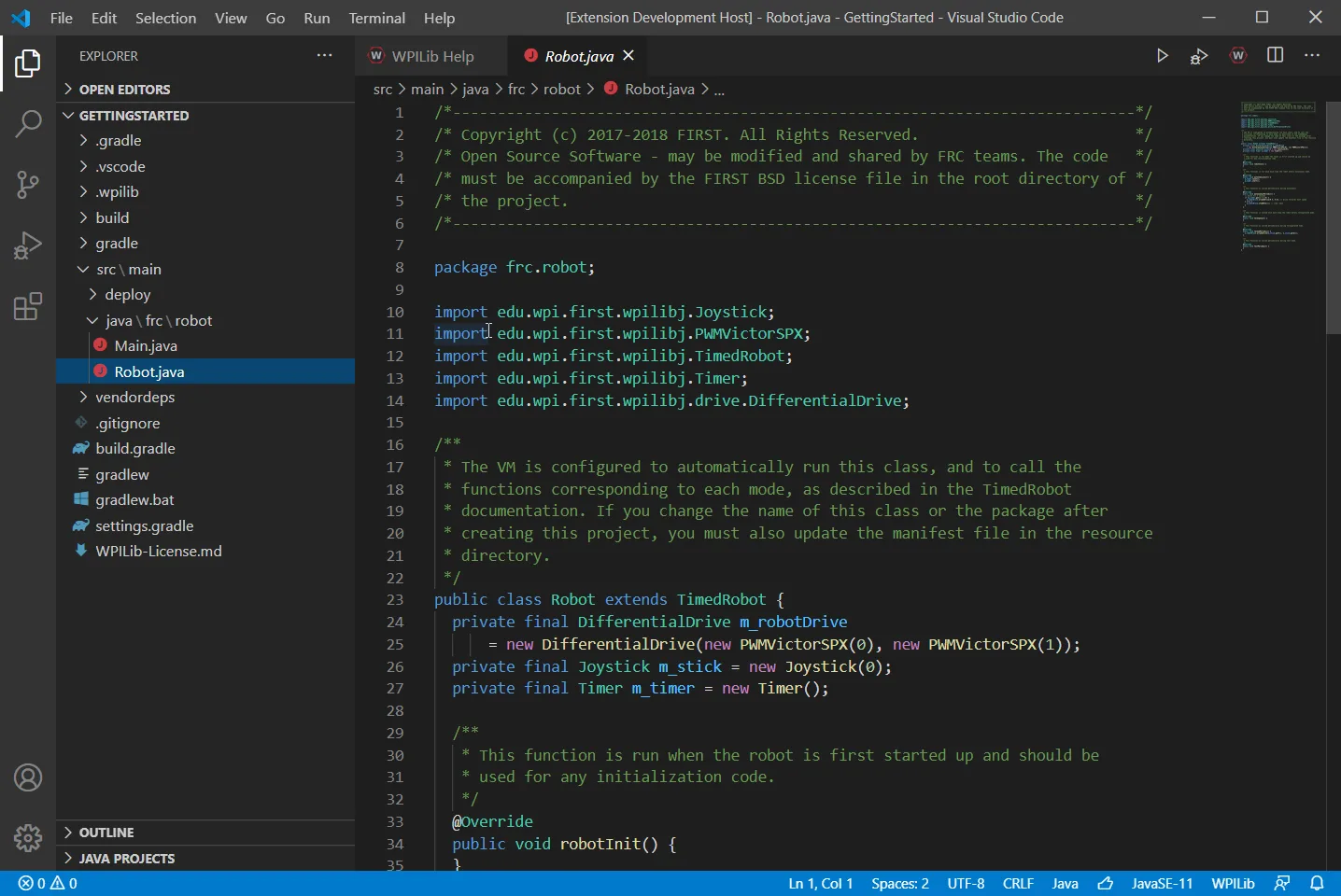
Depois de abrir, veremos a hierarquia do projeto à esquerda. Clicar duas vezes no arquivo abrirá esse arquivo no editor.
Importações
PWM
import edu.wpi.first.wpilibj.TimedRobot;
import edu.wpi.first.wpilibj.Timer;
import edu.wpi.first.wpilibj.XboxController;
import edu.wpi.first.wpilibj.drive.DifferentialDrive;
import edu.wpi.first.wpilibj.motorcontrol.PWMSparkMax;
CTRE
import edu.wpi.first.wpilibj.Joystick;
import edu.wpi.first.wpilibj.TimedRobot;
import edu.wpi.first.wpilibj.Timer;
import edu.wpi.first.wpilibj.drive.DifferentialDrive;
import com.ctre.phoenix.motorcontrol.can.WPI_TalonFX;
REV
import com.revrobotics.CANSparkMax;
import com.revrobotics.CANSparkMaxLowLevel.MotorType;
import edu.wpi.first.wpilibj.TimedRobot;
import edu.wpi.first.wpilibj.Timer;
import edu.wpi.first.wpilibj.XboxController;
import edu.wpi.first.wpilibj.drive.DifferentialDrive;
Nosso código precisa fazer referência aos componentes do WPILib que estão sendo utilizados. Em Java, é feito com declarações import. O programa faz referência a classes como Joystick (para direção), PWMSparkMax / WPI_TalonFX / CANSparkMax (para controle de motores), TimedRobot (a classe base usada no exemplo), Timer (usado para o modo autônomo) e DifferentialDrive (para conectar o controle do joystick aos motores).
Definindo as variáveis para nosso robô de exemplo
PWM
public class Robot extends TimedRobot {
private final PWMSparkMax m_leftDrive = new PWMSparkMax(0);
private final PWMSparkMax m_rightDrive = new PWMSparkMax(1);
private final DifferentialDrive m_robotDrive = new DifferentialDrive(m_leftDrive, m_rightDrive);
private final XboxController m_controller = new XboxController(0);
private final Timer m_timer = new Timer();
/**
* This function is run when the robot is first started up and should be used for any
* initialization code.
*/
@Override
public void robotInit() {
// We need to invert one side of the drivetrain so that positive voltages
// result in both sides moving forward. Depending on how your robot's
// gearbox is constructed, you might have to invert the left side instead.
m_rightDrive.setInverted(true);
}
CTRE
public class Robot extends TimedRobot {
private final WPI_TalonFX m_leftDrive = new WPI_TalonFX(1);
private final WPI_TalonFX m_rightDrive = new WPI_TalonFX(2);
private final DifferentialDrive m_robotDrive = new DifferentialDrive(m_leftDrive, m_rightDrive);
private final Joystick m_stick = new Joystick(0);
private final Timer m_timer = new Timer();
REV
public class Robot extends TimedRobot {
private final CANSparkMax m_leftDrive = new CANSparkMax(1, MotorType.kBrushless);
private final CANSparkMax m_rightDrive = new CANSparkMax(2, MotorType.kBrushless);
private final DifferentialDrive m_robotDrive = new DifferentialDrive(m_leftDrive, m_rightDrive);
private final XboxController m_controller = new XboxController(0);
private final Timer m_timer = new Timer();
O robô de exemplo em nossos exemplos terá um joystick na porta USB 0 para controle tipo arcade e dois motores nas portas PWM 0 e 1 (exemplos do fornecedor usam CAN com IDs 1 e 2). Aqui, criamos objetos do tipo DifferentialDrive (m_robotDrive), Joystick (m_stick) e Timer (m_timer). Esta seção do código faz três coisas:
-
Define as variáveis como membros da nossa classe Robot.
-
Inicializa as variáveis.
Inicialização do robô
@Override
public void robotInit() {}
O método RobotInit é executado quando o programa do robô está iniciando, mas após o construtor. O RobotInit para o nosso programa de exemplo não faz nada. Se quisermos executar algo aqui, podemos fornecer o código acima para substituir o padrão.
Autônomo simples de exemplo
/** This function is run once each time the robot enters autonomous mode. */
@Override
public void autonomousInit() {
m_timer.restart();
}
/** This function is called periodically during autonomous. */
@Override
public void autonomousPeriodic() {
// Drive for 2 seconds
if (m_timer.get() < 2.0) {
// Drive forwards half speed, make sure to turn input squaring off
m_robotDrive.arcadeDrive(0.5, 0.0, false);
} else {
m_robotDrive.stopMotor(); // stop robot
}
}
O método AutonomousInit é executado uma vez cada vez que o robô faz a transição para o modo autônomo a partir de outro modo. Neste programa, reiniciamos o Timer neste método.
AutonomousPeriodic é executado uma vez a cada período enquanto o robô está no modo autônomo. Na classe TimedRobot, o período é um tempo fixo, que padrão é 20ms. Neste exemplo, o código periódico verifica se o temporizador é inferior a 2 segundos e, se for, avança a meio velocidade usando o método ArcadeDrive da classe DifferentialDrive. Se mais de 2 segundos tiverem decorrido, o código para o acionamento do robô.
Controle por analógico para teleoperado
/** This function is called once each time the robot enters teleoperated mode. */
@Override
public void teleopInit() {}
/** This function is called periodically during teleoperated mode. */
@Override
public void teleopPeriodic() {
m_robotDrive.arcadeDrive(-m_controller.getLeftY(), -m_controller.getRightX());
}
Assim como no modo Autônomo, o modo Teleop possui funções TeleopInit e TeleopPeriodic. Neste exemplo, não temos nada para fazer em TeleopInit; ele é fornecido apenas para fins ilustrativos. Em TeleopPeriodic, o código utiliza o método ArcadeDrive para mapear o eixo Y do Joystick para o movimento para frente/trás dos motores de acionamento e o eixo X para o movimento de virar.
Modo de teste
/** This function is called once each time the robot enters test mode. */
@Override
public void testInit() {}
/** This function is called periodically during test mode. */
@Override
public void testPeriodic() {}
O Modo de Teste é usado para testar a funcionalidade do robô. Semelhante ao TeleopInit, os métodos TestInit e TestPeriodic são fornecidos aqui apenas para fins ilustrativos.
Compilando o projeto no robô
Por favor, consulte as instruções aqui para implantar o programa em um robô.