
Faça girar!
Ligar
Agora que o dispositivo está conectado e as conexões foram cuidadosamente verificadas, ligue o robô. Você deverá ver o LED SPARK Flex piscando lentamente, indicando a presença de um novo dispositivo; a cor será magenta. Se o LED estiver apagado ou se você observar um padrão de piscada diferente, consulte o guia de LEDs de status para solucionar o problema.
Se estiver usando um motor com escovas, você poderá ver um erro no sensor. Isso é esperado até que você configure o dispositivo para aceitar um motor com escovas seguindo os passos abaixo.
Conecte ao SPARK Flex
Se você não conseguir visualizar o SPARK Flex, verifique se ele não está sendo usado por outro aplicativo. Em seguida, desconecte o SPARK Flex do computador e conecte-o novamente.
Configuração e instalação básica
Antes de alterar qualquer parâmetro, você precisa atribuir um ID CAN exclusivo ao dispositivo. Esse ID pode ser qualquer número entre 1 e 63. Após definir um ID CAN exclusivo, a interface do usuário será atualizada e permitirá que você altere outros parâmetros.
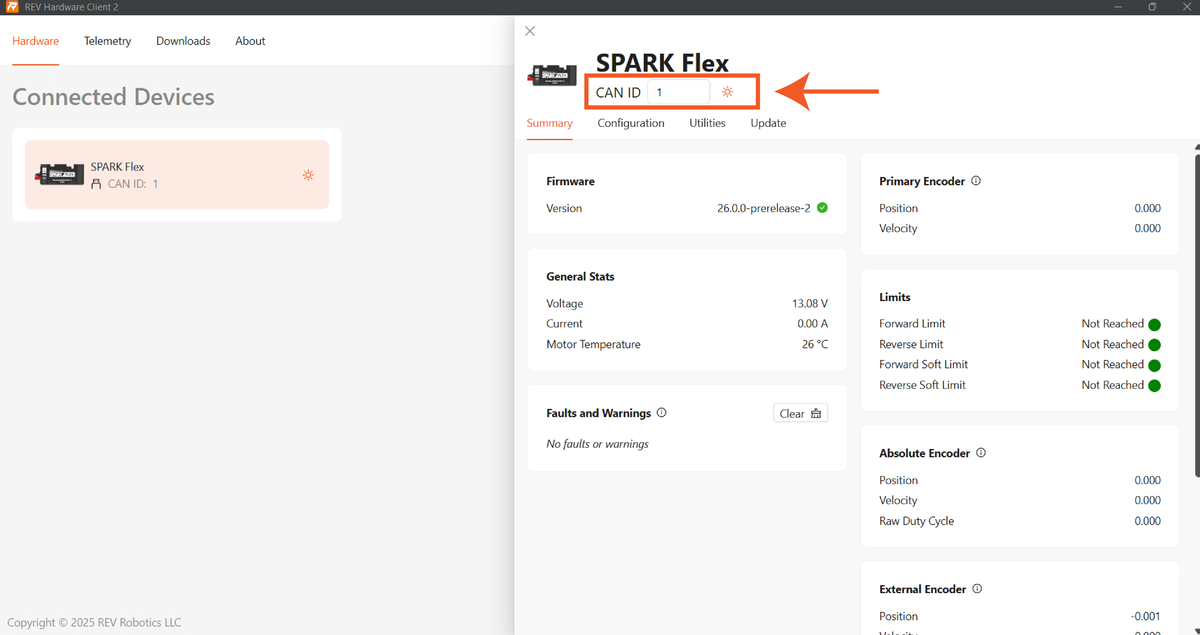
Eventualmente, você poderá configurar uma rede CAN em sua bancada de testes ou robô. Certifique-se de que cada dispositivo na rede tenha um ID CAN exclusivo. É útil etiquetar cada dispositivo com seu número de ID para facilitar a solução de problemas.
Definir o tipo de motor
Se estiver usando um NEO ou NEO 550, verifique se o tipo de motor está definido como REV NEO Brushless, o tipo de sensor como Hall Effect e se o LED está piscando em magenta ou ciano.
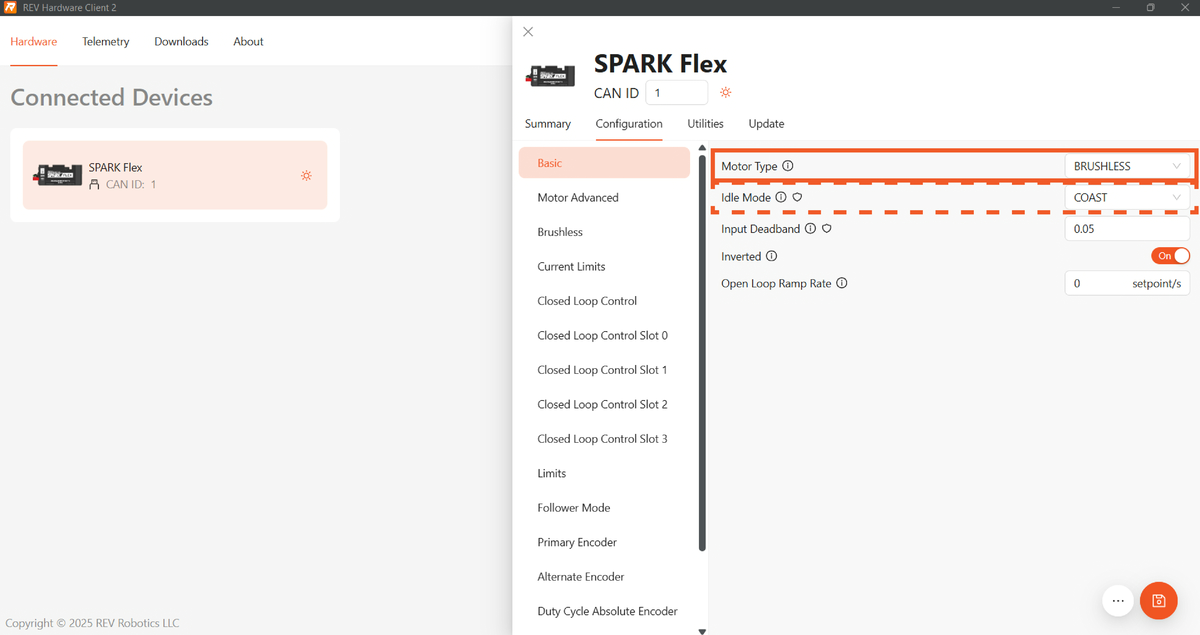
Se você vir um código de erro piscando "Falha no Sensor", verifique se o cabo do encoder está completamente conectado.
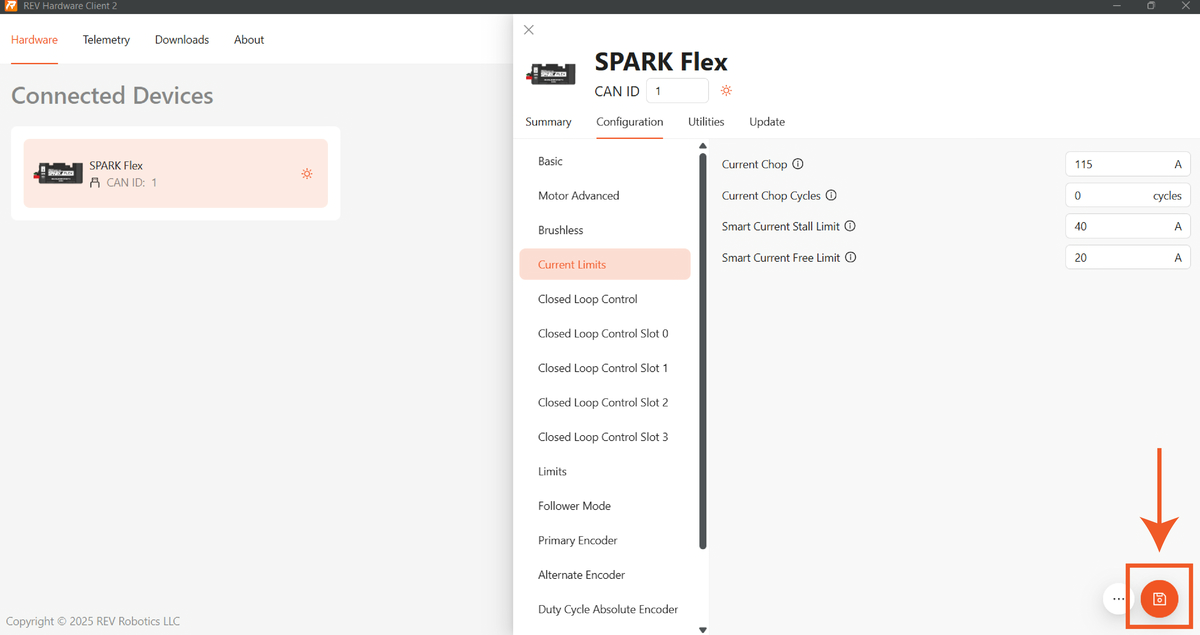
Limitação de corrente
Existem duas maneiras de proteger os motores do seu robô contra danos elétricos em situações de alta corrente: disjuntores e a configuração de Limite de Corrente Inteligente do SPARK Flex. Para proteger seus motores de correntes excessivas, a melhor prática é limitar a corrente tanto com o Limite de Corrente Inteligente do SPARK Flex quanto com um disjuntor com a capacidade adequada.
Os disjuntores, embora sejam uma parte extremamente importante da fiação e da segurança de um robô, são projetados para desarmar apenas em uma temperatura específica, após um determinado período de tempo, para proteger o sistema elétrico contra incêndio ou outros riscos elétricos. Por isso, recomendamos configurar um Limite de Corrente Inteligente para proteger seus motores contra danos causados por altas correntes.
O Controlador de Motor SPARK Flex inclui um recurso de Limite de Corrente Inteligente que ajusta a saída aplicada ao motor para manter uma corrente de fase constante.
Por padrão, a configuração do Limite de Corrente Inteligente do SPARK Flex é de 80 A para qualquer motor utilizado. Recomendamos utilizar nossos dados de teste de rotor bloqueado ou a tabela abaixo para decidir qual o valor ideal para o Limite de Corrente Inteligente do seu robô: Teste de Rotor Bloqueado para o NEO (REV-21-1650) e NEO 550 (REV-21-1651).
Lembre-se de que algumas configurações, como o Limite Inteligente de Corrente, devem ser gravadas na memória flash por meio de código ou do Hardware Client para serem mantidas após um ciclo de energia do SPARK Flex.
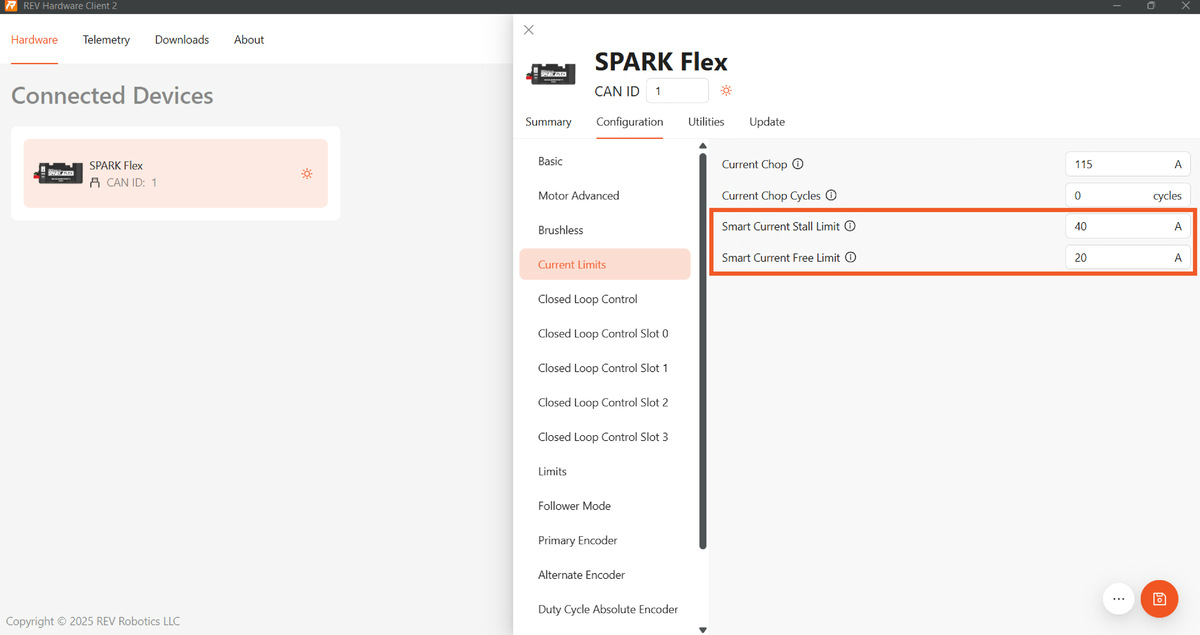
Limite de corrente sugerido
O limite de corrente ideal pode variar dependendo da sua aplicação específica, mas esses valores podem ser usados como ponto de partida para reduzir a probabilidade de sobrecarga no motor ao começar a ajustar o Limite de Corrente Inteligente do seu mecanismo.
| Tipo de motor | Faixa limite de corrente |
|---|---|
| NEO (REV-21-1650) | 40A - 60A |
| NEO 550 (REV-21-1651) | 20A - 40A |
Aviso: Definir limites de corrente fora dos intervalos sugeridos acima pode causar sobrecarga não intencional e danos graves aos componentes, que não são cobertos pela garantia.
Salve as configurações
As configurações devem ser salvas para que o SPARK Flex se lembre da nova configuração mesmo após ser desligado e ligado novamente. Para isso, pressione o botão "Persistir Parâmetros" no canto inferior direito da página. Levará alguns segundos para salvar, o que será indicado pelo símbolo de carregamento no botão.
Quaisquer configurações salvas desta forma serão lembradas quando o dispositivo for ligado novamente. Você sempre poderá restaurar as configurações de fábrica se precisar redefinir o dispositivo.
Gire o motor
Antes de ligar qualquer motor, certifique-se de que todos os componentes estejam em boas condições de funcionamento, que o motor esteja bem fixado e que todos os presentes estejam cientes do perigo. Os motores FRC são muito potentes e podem causar danos a pessoas e propriedades rapidamente.
Se o ID CAN do SPARK ainda estiver definido como 0 ao tentar acionar o motor, ele não girará. Certifique-se de que o ID CAN foi configurado corretamente e de que você clicou no botão "Persistir parâmetros" após a configuração.
Mantenha o cabo CAN desconectado durante todo o teste. Por motivos de segurança, o REV Hardware Client não acionará o motor se o roboRIO estiver conectado. Se o roboRIO estiver conectado, reinicie o SPARK Flex.
Para girar o motor, acesse a aba Executar, mantenha todas as configurações padrão e pressione Executar Motor. O ponto de ajuste padrão é 0, o que significa que o motor está em marcha lenta (0% de potência). Ao pressionar Executar, você deverá ver o LED passar de piscando lentamente para acender continuamente, indicando que o motor está em marcha lenta.
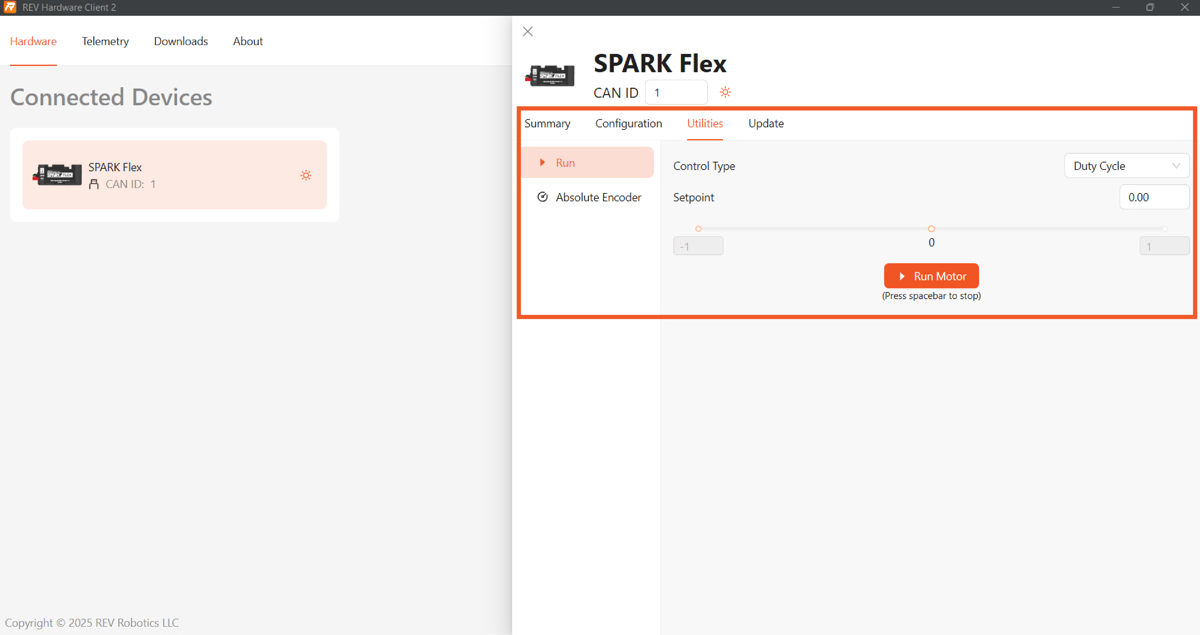
Aumente lentamente o valor do controle deslizante de ponto de ajuste. O motor deve começar a girar e você deverá ver um padrão de luzes verdes piscando proporcional à velocidade que você definiu para o motor. Diminua lentamente o valor do controle deslizante de volta. O motor deve girar no sentido inverso e você deverá ver um padrão de luzes vermelhas piscando proporcional à velocidade que você definiu para o motor.
Se não conseguir girar o motor, consulte nosso guia de solução de problemas.