
Tempo Decorrido - OnBot Java
Introdução ao tempo decorrido
Uma maneira de criar um código autônomo é usar um temporizador para definir quais ações devem ocorrer quando. Dentro do SDK, as ações podem ser programadas para um temporizador usando o ElapsedTime. Os temporizadores consistem em duas categorias principais: contagem regressiva e contagem progressiva. Na maioria das aplicações, um temporizador é considerado um dispositivo que conta regressivamente a partir de um intervalo de tempo especificado, como o temporizador em um telefone ou micro-ondas. No entanto, alguns temporizadores, como cronômetros, contam progressivamente a partir de zero. Esses tipos de temporizadores medem o tempo decorrido. O ElapsedTime é um temporizador de contagem progressiva, registrando o tempo decorrido desde o início de um evento definido, como o início de um cronômetro. Neste caso, é o tempo decorrido desde quando o temporizador é instanciado ou redefinido no código. O temporizador ElapsedTime começa a contar o tempo decorrido a partir do ponto de sua criação dentro de um código. Por exemplo, nesta seção, o ElapsedTime será criado (ou instanciado) na seção de código que ocorre quando o modo operacional é inicializado. Não há opção de parar o temporizador ElapsedTime. Em vez disso, a função reset() pode ser usada dentro do seu código para reiniciar o temporizador em vários intervalos. Depois que o temporizador é redefinido, o tempo decorrido pode ser consultado chamando métodos como time(), seconds() ou milliseconds(). O tempo fornecido pelos métodos consultados pode ser usado em loops para determinar quanto tempo uma ação específica deve ocorrer.
Para obter mais informações sobre o objeto ElapsedTime, consulte a documentação do Java (Java Docs).
| Seções | Objetivos das seções |
|---|---|
| Noções básicas de programação com tempo | Aprender a lógica para fazer um código autônomo por tempo |
Programação com tempo decorrido
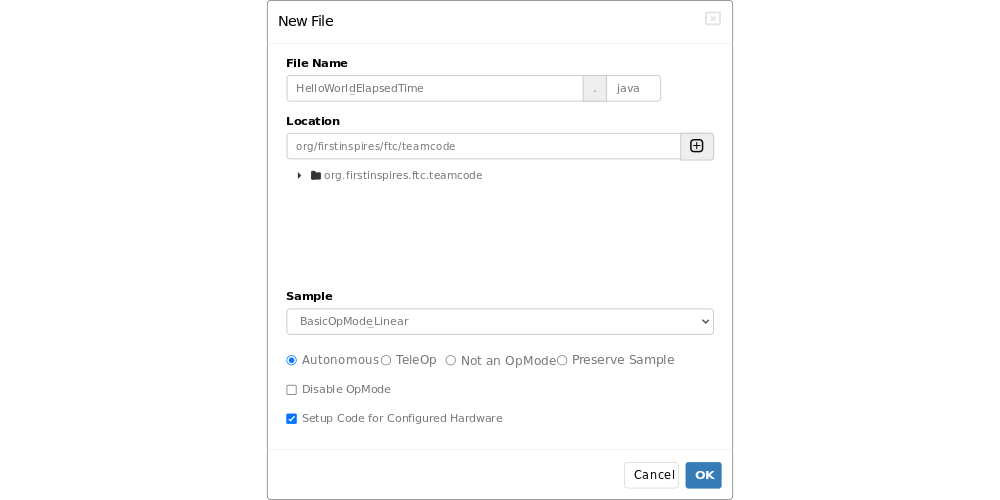
Para começar, crie um novo modo operacional (op mode) chamado HelloWorld_ElapsedTime utilizando o exemplo BasicOpMode_Linear. Existem outras características que você pode selecionar para facilitar as coisas ao começar a desenvolver seus modos operacionais autônomos. Por exemplo, como você pode se lembrar, selecionar "Setup Code for Configured Hardware" cria as referências necessárias para o mapa de hardware. Outra opção que você pode escolher é configurar o código como um modo operacional autônomo. Isso adiciona a anotação @Autonomous, que distingue o código como um modo operacional autônomo na aplicação Driver Station.
Ao criar um modo operacional (op mode), é necessário decidir se ele deve ser configurado como modo autônomo. Para aplicações com duração inferior a 30 segundos, geralmente necessárias para jogabilidade competitiva, é recomendado alterar o tipo de op mode para autônomo. Para aplicações com duração superior a 30 segundos, configurar o código como o tipo de op mode autônomo limitará o tempo de execução do seu código autônomo a 30 segundos. Se você planeja ultrapassar os 30 segundos incorporados no SDK, é recomendável manter o código como um tipo de op mode teleoperado. Para obter informações sobre como os op modes funcionam, visite a seção de Introdução à Programação.
A seleção das características discutidas acima permitirá que você comece com o seguinte código:
package org.firstinspires.ftc.teamcode;
import com.qualcomm.robotcore.eventloop.opmode.LinearOpMode;
import com.qualcomm.robotcore.hardware.AnalogInput;
import com.qualcomm.robotcore.hardware.Gyroscope;
import com.qualcomm.robotcore.hardware.ColorSensor;
import com.qualcomm.robotcore.hardware.Servo;
import com.qualcomm.robotcore.hardware.DigitalChannel;
import com.qualcomm.robotcore.eventloop.opmode.Autonomous;
import com.qualcomm.robotcore.eventloop.opmode.TeleOp;
import com.qualcomm.robotcore.eventloop.opmode.Disabled;
import com.qualcomm.robotcore.hardware.DcMotor;
import com.qualcomm.robotcore.hardware.DcMotorSimple;
@Autonomous
public class HelloWorld_ElapsedTime extends LinearOpMode {
private DcMotor leftMotor;
private DcMotor rightMotor;
private DcMotor arm;
private Servo claw;
private DigitalChannel touch;
private Gyroscope imu;
@Override
public void runOpMode() {
imu = hardwareMap.get(Gyroscope.class, "imu");
leftMotor = hardwareMap.get(DcMotor.class, "leftmotor");
rightMotor = hardwareMap.get(DcMotor.class, "rightmotor");
arm = hardwareMap.get(DcMotor.class, "arm");
claw = hardwareMap.get(Servo.class, "claw");
touch = hardwareMap.get(DigitalChannel.class, "touch");
telemetry.addData("Status", "Initialized");
telemetry.update();
// Wait for the game to start (driver presses PLAY)
waitForStart();
// run until the end of the match (driver presses STOP)
while (opModeIsActive()){
telemetry.addData("Status", "Running");
telemetry.update();
}
}
}
Como o foco desta seção é o Tempo Decorrido, é necessário criar uma variável de ElapsedTime e uma instância de ElapsedTime. Para fazer isso, a seguinte linha é necessária:
private ElapsedTime runtime = new ElapsedTime();
A linha acima realiza duas ações. Uma variável privada ElapsedTime chamada "runtime" é criada. Uma vez que "runtime" é criado e definido como uma variável ElapsedTime, ele pode armazenar as informações e dados de tempo relevantes. A outra parte da linha runtime = new ElapsedTime(); cria uma instância do objeto temporizador ElapsedTime e a atribui à variável "runtime".
Adicione essa linha ao op mode junto com as outras variáveis privadas.
public class HelloWorld_ElapsedTime extends LinearOpMode {
private DcMotor leftMotor;
private DcMotor rightMotor;
private DcMotor arm;
private Servo claw;
private DigitalChannel touch;
private Gyroscope imu;
private ElapsedTime runtime = new ElapsedTime();
O objetivo deste exemplo é realizar uma série de ações em intervalos de tempo, como avançar por três segundos. Outra maneira de pensar é que o robô avança enquanto o temporizador ElapsedTime for menor ou igual a três segundos, ou seja, runtime.seconds() <= 3.0. Para este exemplo em particular, a melhor maneira de atingir esse objetivo é usar um loop while. Substitua o loop while padrão do op mode pelo seguinte loop:
waitForStart();
while (runtime.seconds() <= 3.0) {
}
É importante saber que, dentro de um modo operacional linear, um loop while deve sempre ter a condição Booleana opModeIsActive(). Essa condição garante que o loop while será encerrado quando o botão de parada for pressionado.
Os loops while executam quando a condição é verdadeira e param quando a condição é falsa. Neste caso, o loop while deve iniciar apenas se ambas as condições (opModeIsActive() e runtime.seconds() <= 3.0) forem verdadeiras. O loop while deve terminar quando runtime.seconds() > 3 for maior que três segundos ou quando o botão de parada na estação do piloto for pressionado. Para realizar isso, o operador lógico && precisa ser utilizado.
O operador && é um operador lógico em Java. Este símbolo é equivalente a "e" em Java. Utilizar isso em uma instrução condicional requer que ambas as declarações precisem ser verdadeiras para que a condição geral seja verdadeira.
waitForStart();
while (opModeIsActive() && (runtime.seconds() <= 3.0)) {
}
Lembre-se de que o temporizador ElapsedTime começa a contar quando é instanciado ou resetado. Como o temporizador está sendo instanciado quando a variável runtime está sendo criada, e as criações de variáveis estão ocorrendo antes do comando waitForStart(); ser executado; o temporizador começará a contar quando o modo operacional for inicializado, em vez de quando o modo operacional for iniciado. Isso pode causar problemas na consistência do desempenho do robô, dependendo do atraso entre a inicialização e o início.
Considere o seguinte cenário: Em um ambiente de competição, equipes frequentemente são obrigadas a inicializar seu robô antes do início de uma partida. Isso significa que um robô pode permanecer na fase de inicialização por alguns segundos a alguns minutos. Se um código autônomo é baseado no uso de um temporizador ElapsedTime que começa ao ser instanciado, quanto mais tempo um robô passa na fase de inicialização, menos provável é que ele funcione conforme esperado.
Para evitar problemas decorrentes de um atraso de tempo entre a inicialização e o início, é possível adicionar um reset do temporizador ao código. Adicione a linha runtime.reset(); entre o comando waitForStart(); e o loop while.
waitForStart();
runtime.reset();
while (opModeIsActive() && (runtime.seconds() <= 3.0)) {
}
Agora que o temporizador está resetado, vamos em frente e adicionar o código relacionado aos motores. Se você se lembra do artigo "Programming Drivetrain Motors", os motores no trem de força (drivetrain) se espelham entre si. A natureza espelhada da montagem dos motores faz com que eles girem em direções opostas. Para corrigir essa discrepância, a direção do motor direito precisa ser invertida. Adicione as seguintes linhas de código ao op mode acima do comando waitForStart();
rightMotor.setDirection(DcMotor.Direction.REVERSE);
Agora, dentro do loop while, adicione as linhas leftmotor.setPower(1); e rightmotor.setPower(1); para definir ambos os motores para funcionar em velocidade máxima na direção para frente.
package org.firstinspires.ftc.teamcode;
import com.qualcomm.robotcore.eventloop.opmode.LinearOpMode;
import com.qualcomm.robotcore.hardware.AnalogInput;
import com.qualcomm.robotcore.hardware.Gyroscope;
import com.qualcomm.robotcore.hardware.ColorSensor;
import com.qualcomm.robotcore.hardware.Servo;
import com.qualcomm.robotcore.hardware.DigitalChannel;
import com.qualcomm.robotcore.eventloop.opmode.Autonomous;
import com.qualcomm.robotcore.eventloop.opmode.TeleOp;
import com.qualcomm.robotcore.eventloop.opmode.Disabled;
import com.qualcomm.robotcore.hardware.DcMotor;
import com.qualcomm.robotcore.hardware.DcMotorSimple;
import com.qualcomm.robotcore.util.ElapsedTime;
@Autonomous
public class HelloWorld_ElapsedTime extends LinearOpMode {
private DcMotor leftMotor;
private DcMotor rightMotor;
private DcMotor arm;
private Servo claw;
private DigitalChannel touch;
private Gyroscope imu;
private ElapsedTime runtime = new ElapsedTime();
@Override
public void runOpMode() {
imu = hardwareMap.get(Gyroscope.class, "imu");
leftMotor = hardwareMap.get(DcMotor.class, "leftmotor");
rightMotor = hardwareMap.get(DcMotor.class, "rightmotor");
arm = hardwareMap.get(DcMotor.class, "arm");
claw = hardwareMap.get(Servo.class, "claw");
touch = hardwareMap.get(DigitalChannel.class, "touch");
rightMotor.setDirection(DcMotor.Direction.REVERSE);
telemetry.addData("Status", "Initialized");
telemetry.update();
// Wait for the game to start (driver presses PLAY)
waitForStart();
// run until the end of the match (driver presses STOP)
runtime.reset();
while (opModeIsActive() && (runtime.seconds() <= 3.0)) {
leftMotor.setPower(1);
rightMotor.setPower(1);
}
Agora você tem o código básico necessário para fazer com que seu robô avance por três segundos. Isso deve proporcionar a você uma noção básica de codificação com ElapsedTime. Outras ações, como abrir e fechar uma garra ou levantar um braço, podem ser codificadas em seu programa autônomo.
Como aconselhado nas seções anteriores, é benéfico adicionar telemetria a determinado código para obter os dados de feedback que você deseja ou precisa. Para este exemplo, a telemetria mostrará quantos segundos se passaram para cada etapa da jornada do robô.
while (opModeIsActive() && (runtime.seconds() <= 3.0)) {
leftMotor.setPower(1);
rightMotor.setPower(1);
telemetry.addData("Leg 1", runtime.seconds());
telemetry.update();
}
Para este guia específico, o objetivo final é testar a precisão de um robô avançando do ponto A para o ponto B e, em seguida, recuando de volta para o ponto A. Para fazer isso, é necessário escrever outra seção de código com base no temporizador. Uma maneira de fazer isso é copiar o loop while que você já criou e fazer as edições necessárias, como alternar a direção de energia para os motores.
runtime.reset();
while (opModeIsActive() && (runtime.seconds() <= 3.0)) {
leftMotor.setPower(1);
rightMotor.setPower(1);
telemetry.addData("Leg 1", runtime.seconds());
telemetry.update();
}
runtime.reset();
while (opModeIsActive() && (runtime.seconds() <= 3.0)) {
leftMotor.setPower(-1);
rightMotor.setPower(-1);
telemetry.addData("Leg 2", runtime.seconds());
telemetry.update();
}
Observe que um runtime.reset(); adicional foi adicionado ao código acima. A outra opção para um segundo while loop teria envolvido adicionar uma condição adicional ao while loop, como:
- while(opModeIsActive() && (runtime.seconds() > 3.0) && runtime.seconds() <=6.0)
A escolha de redefinir o temporizador antes de iniciar uma nova etapa da jornada do robô foi feita para reduzir a quantidade de alterações de código que podem ser necessárias durante os testes do código.
Exemplo de código completo]
package org.firstinspires.ftc.teamcode;
import com.qualcomm.robotcore.eventloop.opmode.LinearOpMode;
import com.qualcomm.robotcore.hardware.AnalogInput;
import com.qualcomm.robotcore.hardware.Gyroscope;
import com.qualcomm.robotcore.hardware.ColorSensor;
import com.qualcomm.robotcore.hardware.Servo;
import com.qualcomm.robotcore.hardware.DigitalChannel;
import com.qualcomm.robotcore.eventloop.opmode.Autonomous;
import com.qualcomm.robotcore.eventloop.opmode.TeleOp;
import com.qualcomm.robotcore.eventloop.opmode.Disabled;
import com.qualcomm.robotcore.hardware.DcMotor;
import com.qualcomm.robotcore.hardware.DcMotorSimple;
import com.qualcomm.robotcore.util.ElapsedTime;
@Autonomous
public class HelloWorld_ElapsedTime extends LinearOpMode {
private DcMotor leftMotor;
private DcMotor rightMotor;
private DcMotor arm;
private Servo claw;
private DigitalChannel touch;
private Gyroscope imu;
private ElapsedTime runtime = new ElapsedTime();
@Override
public void runOpMode() {
imu = hardwareMap.get(Gyroscope.class, "imu");
leftMotor = hardwareMap.get(DcMotor.class, "leftmotor");
rightMotor = hardwareMap.get(DcMotor.class, "rightmotor");
arm = hardwareMap.get(DcMotor.class, "arm");
claw = hardwareMap.get(Servo.class, "claw");
touch = hardwareMap.get(DigitalChannel.class, "touch");
leftMotor.setDirection(DcMotor.Direction.FORWARD); // Set to REVERSE if using AndyMark motors
rightMotor.setDirection(DcMotor.Direction.REVERSE);
telemetry.addData("Status", "Initialized");
telemetry.update();
// Wait for the game to start (driver presses PLAY)
waitForStart();
// run until the end of the match (driver presses STOP)
runtime.reset();
while (opModeIsActive() && (runtime.seconds() <= 3.0)) {
leftMotor.setPower(1);
rightMotor.setPower(1);
telemetry.addData("Leg 1", runtime.seconds());
telemetry.update();
}
runtime.reset();
while (opModeIsActive() && (runtime.seconds() <= 3.0)) {
leftMotor.setPower(-1);
rightMotor.setPower(-1);
telemetry.addData("Leg 2", runtime.seconds());
telemetry.update();
}
}
}