
Exemplos de Aplicação REV ION
Fiação usando o sistema de controle da FIRST Robotics Competition
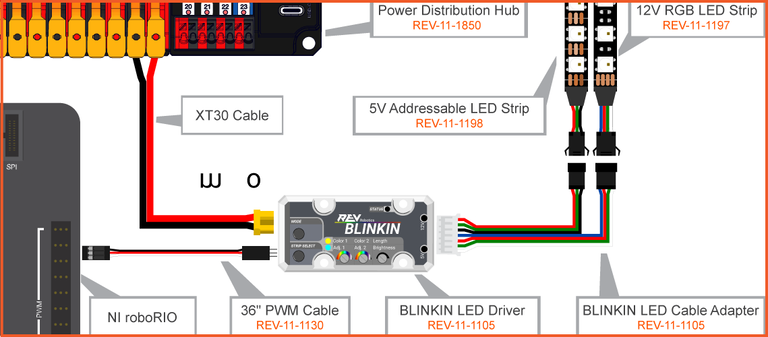
O Driver de LED BLINKIN vem com o Cabo PWM de 36” (REV-11-1130), que pode ser usado para conectar o BLINKIN às portas PWM do NI roboRIO para comunicação. Para alimentar o BLINKIN, você precisa de um cabo XT30 com um conector macho em uma ponta e fios desencapados na outra. Conecte o conector macho ao BLINKIN e as extremidades desencapadas nos canais apropriados do Power Distribution Hub.
O BLINKIN é capaz de controlar tanto uma fita de LED endereçável de 5V (REV-11-1198) quanto uma fita de LED RGB de 12V (REV-11-1197). A imagem abaixo mostra como ambos os tipos de fitas de LED se conectam ao BLINKIN usando o Adaptador de Cabo LED BLINKIN (REV-11-1105).
Sempre certifique-se de ler as regras relevantes e usar fios com bitola adequada antes de utilizar qualquer coisa no seu robô de competição.
Após conectar seu Blinkin ao robô, siga as instruções de configuração e as orientações para controle PWM conforme desejado.
Exemplo de Programação para FIRST Robotics Competition
No Sistema de Controle FRC, a faixa de saída dos motores varia dependendo do tipo de controlador de motor que foi inicializado. A faixa do pulso de saída é ajustada a partir da potência solicitada pelo usuário, que varia de -1 a 1, para a faixa definida para cada tipo de controlador de motor.
TABELA
| Controlador de motores | Pulso Mín. do comprimento de saída (us) | Pulso Máx. do comprimento de saída (us) |
|---|---|---|
| SPARK | 1000 | 2000 |
| SRX | 997 | 2004 |
| Talon SR | 989 | 2037 |
| Jaguar | 697 | 2322 |
O tipo de controlador de motor SPARK possui uma saída que corresponde diretamente à entrada do Blinkin, o que torna a conversão da faixa de código de -1 a 1 para a faixa de entrada do Blinkin de 1000-2000 μs a mais simples. Outros tipos de controle, incluindo servo, do roboRIO também podem ser usados, mas o usuário precisará ajustar a escala da faixa de entrada corretamente para garantir que está enviando apenas uma faixa PWM válida e para poder selecionar o padrão de LED desejado.
Como exemplo, o trecho das Tabelas de Padrões de LED inclui o valor correto de saída do motor SPARK para cada padrão. A tabela abaixo lista os valores de controle do motor associados a padrões específicos:
Exemplo de Valores de Controle Spark baseados na Tabela de Padrões de LED
TABELA
| Cor do LED/Padrão | Valor de saída do motor |
|---|---|
| Arco-íris com Cores do Oceano | -0.95 |
| Scanner Larson (Semelhante a um Cylon) | -0.35 |
| Batimento cardíaco rápido na Cor 1 do Time selecionada pelo usuário | 0.07 |
| Azul Sólido | 0.87 |
Trecho das Tabelas de Padrões de LED
TABELA
| Largura do Pulso (μs) | Valor roboRIO SPARK | Tipo de Padrão | Padrão/Paleta |
|---|---|---|---|
| 1005 | -0,99 | Padrão com Paleta Fixa | Arco-íris, Paleta Rainbow |
| 1015 | -0,97 | Padrão com Paleta Fixa | Arco-íris, Paleta Festiva |
| 1025 | -0,95 | Padrão com Paleta Fixa | Arco-íris, Paleta Oceano |
| ... | ... | ... | ... |
| 1325 | -0,35 | Padrão com Paleta Fixa | Scanner Larson, Vermelho |
| ... | ... | ... | ... |
| 1515 | 0,03 | Padrão Cor 1 | Batimento Cardíaco Lento |
| 1525 | 0,05 | Padrão Cor 1 | Batimento Cardíaco Médio |
| 1535 | 0,07 | Padrão Cor 1 | Batimento Cardíaco Rápido |
| ... | ... | ... | ... |
| 1765 | 0,53 | Padrão Cor 1 e 2 | Ondas de Cor, Cor 1 e 2 |
| 1935 | 0,87 | Cores Sólidas | Azul |
| 1945 | 0,89 | Cores Sólidas | Azul Violeta |
| 1955 | 0,91 | Cores Sólidas | Violeta |
Ideias de Aplicação para Robótica Competitiva
Adicionar LEDs ao seu robô (ou outro projeto) pode fazer mais do que apenas deixá-los parecerem legais; você pode usar LEDs para fornecer feedback visual crítico. Aqui estão alguns exemplos:
-
Programe um botão do controlador para alterar o padrão de saída do LED (por exemplo, 85 - Amarelo Sólido) e o piloto pode usar os LEDs para se comunicar com o jogador humano em uma estação de portal através do campo, indicando que o robô está pronto para receber um objeto de jogo.
-
Se o motorista tiver pouca visibilidade para ver se o robô adquiriu um objeto de jogo, adicione um sensor à entrada e a fita de LED pode ser programada para exibir automaticamente um novo padrão quando o objeto for adquirido. O motorista nunca precisa desviar os olhos do robô para verificar o painel porque o robô exibirá claramente seu status.
-
Usando o valor do tempo de jogo disponível no software, os LEDs podem ser alterados para um padrão de aviso de tempo (por exemplo, Vermelho Sólido) com X segundos restantes em uma partida.
-
O robô pode exibir um padrão diferente quando habilitado versus desabilitado, o que fornece um indicador mais visível do estado do robô do que o RSL (indicador de estado da luz).