
Exemplos de Aplicação REV ION
Fiação usando o sistema de controle da FIRST Robotics Competition
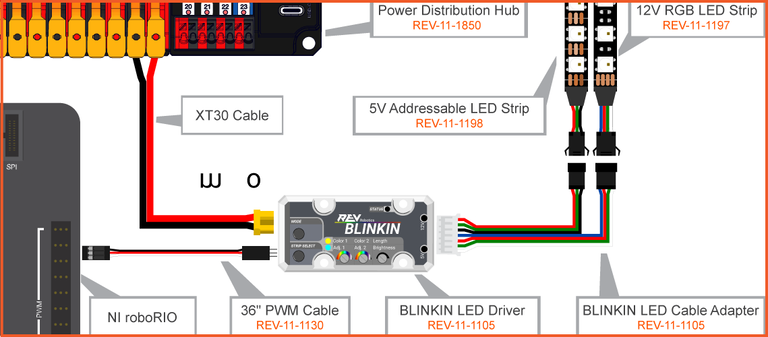
O Driver de LED BLINKIN vem com o Cabo PWM de 36” (REV-11-1130), que pode ser usado para conectar o BLINKIN às portas PWM do NI roboRIO para comunicação. Para alimentar o BLINKIN, você precisa de um cabo XT30 com um conector macho em uma ponta e fios desencapados na outra. Conecte o conector macho ao BLINKIN e as extremidades desencapadas nos canais apropriados do Power Distribution Hub.
O BLINKIN é capaz de controlar tanto uma fita de LED endereçável de 5V (REV-11-1198) quanto uma fita de LED RGB de 12V (REV-11-1197). A imagem abaixo mostra como ambos os tipos de fitas de LED se conectam ao BLINKIN usando o Adaptador de Cabo LED BLINKIN (REV-11-1105).
Sempre certifique-se de ler as regras relevantes e usar fios com bitola adequada antes de utilizar qualquer coisa no seu robô de competição.
Após conectar seu Blinkin ao robô, siga as instruções de configuração e as orientações para controle PWM conforme desejado.
Ideias de Aplicação para Robótica Competitiva
Adicionar LEDs ao seu robô (ou outro projeto) pode fazer mais do que apenas deixá-los parecerem legais; você pode usar LEDs para fornecer feedback visual crítico. Aqui estão alguns exemplos:
-
Programe um botão do controlador para alterar o padrão de saída do LED (por exemplo, 85 - Amarelo Sólido) e o piloto pode usar os LEDs para se comunicar com o jogador humano em uma estação de portal através do campo, indicando que o robô está pronto para receber um objeto de jogo.
-
Se o motorista tiver pouca visibilidade para ver se o robô adquiriu um objeto de jogo, adicione um sensor à entrada e a fita de LED pode ser programada para exibir automaticamente um novo padrão quando o objeto for adquirido. O motorista nunca precisa desviar os olhos do robô para verificar o painel porque o robô exibirá claramente seu status.
-
Usando o valor do tempo de jogo disponível no software, os LEDs podem ser alterados para um padrão de aviso de tempo (por exemplo, Vermelho Sólido) com X segundos restantes em uma partida.
-
O robô pode exibir um padrão diferente quando habilitado versus desabilitado, o que fornece um indicador mais visível do estado do robô do que o RSL (indicador de estado da luz).