Servo inteligente
Noções básicas de SRS
Usaremos ao longo desse livro o termo SRS para nos referirmos a "Servo robô inteligente", é a sigla usada para denominar o termo "Smart Robot Servo" (SRS)
O REV Robotics Smart Robot Servo (SRS) (REV-41-1097) é um servo com engrenagens de metal configurável que elimina a incerteza na hora de alinhar e ajustar mecanismos baseados em servo. Um SRS pode ser usado como um servo angular padrão, um servo angular personalizado e um servo de rotação contínua, bastando alterar suas configurações.

Especificações do produto
O Servo robô inteligente incluí os seguintes recursos:
- Operação normal
- 270° de faixa de atuação
- Engrenagens de metal
- Recursos inteligentes
- Programável com o SRS Programmer
- Modo de limite
- Definir limites angulares esquerda e direita
- Servo não ultrapassará os limites
- Modo contínuo
- Servo rotacionará continuamente
- Velocidade e direção são definidas pelo impulso
Especificações Mecânicas
| Descrição | Valores |
|---|---|
| Torque de parada (6V) | 13,5 kg-cm / 187,8 oz-in |
| Velocidade (6V) | 0,13s/60° |
| Faixa angular máxima | 270° |
| Material da engrenagem | Latão |
| Quantidade de dentes | 25T |
| Dimensões | 40,2mm x 20,0mm x 38,0mm |
| Peso | 2,05oz |
Especificações Elétricas
| Descrição | Min | Nominal | Max |
|---|---|---|---|
| Faixa de tensão | 4,8V | 6,0V | 7,4V |
| Corrente de parada (em 6V) | 2A |
Pulso de entrada:
- Minímo: 500us
- Centro: 1500us
- Máximo: 2500us
Conteúdo do kit
O SRS acompanha o seguinte:
- REV Servo
- Variedade de braço
- Hardware de montagem
É o servo o atuador adequado para o seu mecanismo? Consulte a seção "Escolhendo um Atuador" da REV Robotics para saber mais.
Modos operacionais
Pronto para uso, o SRS opera como um servo de 270°. No entanto, o Programador SRS da REV pode reconfigurar o SRS para definir limites angulares ou alterná-lo para um modo de rotação contínua.
Para obter mais informações sobre como usar o programador SRS para alterar os modos do servo, consulte a seção "Programador SRS".
Modo padrão
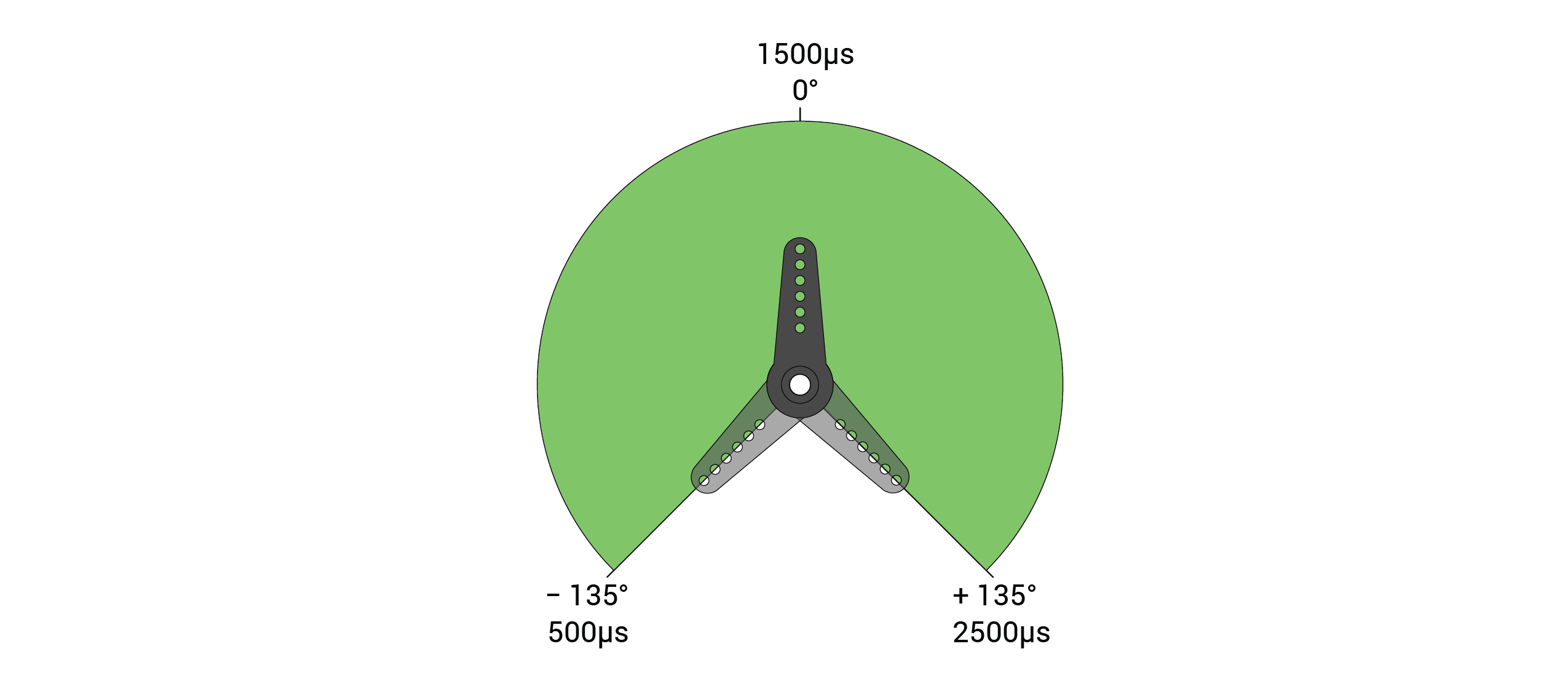
A faixa padrão para o SRS é de 270°. Essa faixa é mapeada para uma faixa de pulso de entrada de 500μs a 2500μs, com 1500μs como ponto central. A imagem abaixo descreve a relação entre pulso e ângulo.
Rotação contínua
O SRS pode ser configurado com o Programador SRS para operar em modo de rotação contínua. Neste modo, a mesma faixa de pulso de entrada é mapeada para direção e velocidade. A tabela abaixo lista o mapeamento de pulso para direção e velocidade.
Tamanho do puldo é abreviado como PW (Pulse Width)
| Tamanho do pulso (us) | 500 | 500 < PW < 1500 | 1500 | 1500 < PW < 2500 | 2500 |
|---|---|---|---|---|---|
| Direção | Horário | Horário | Parado | Anti-horário | Anti-Horário |
| Velocidade | Máxima | Proporcional | Parado | Proporcional | Máxima |
Limites angulares
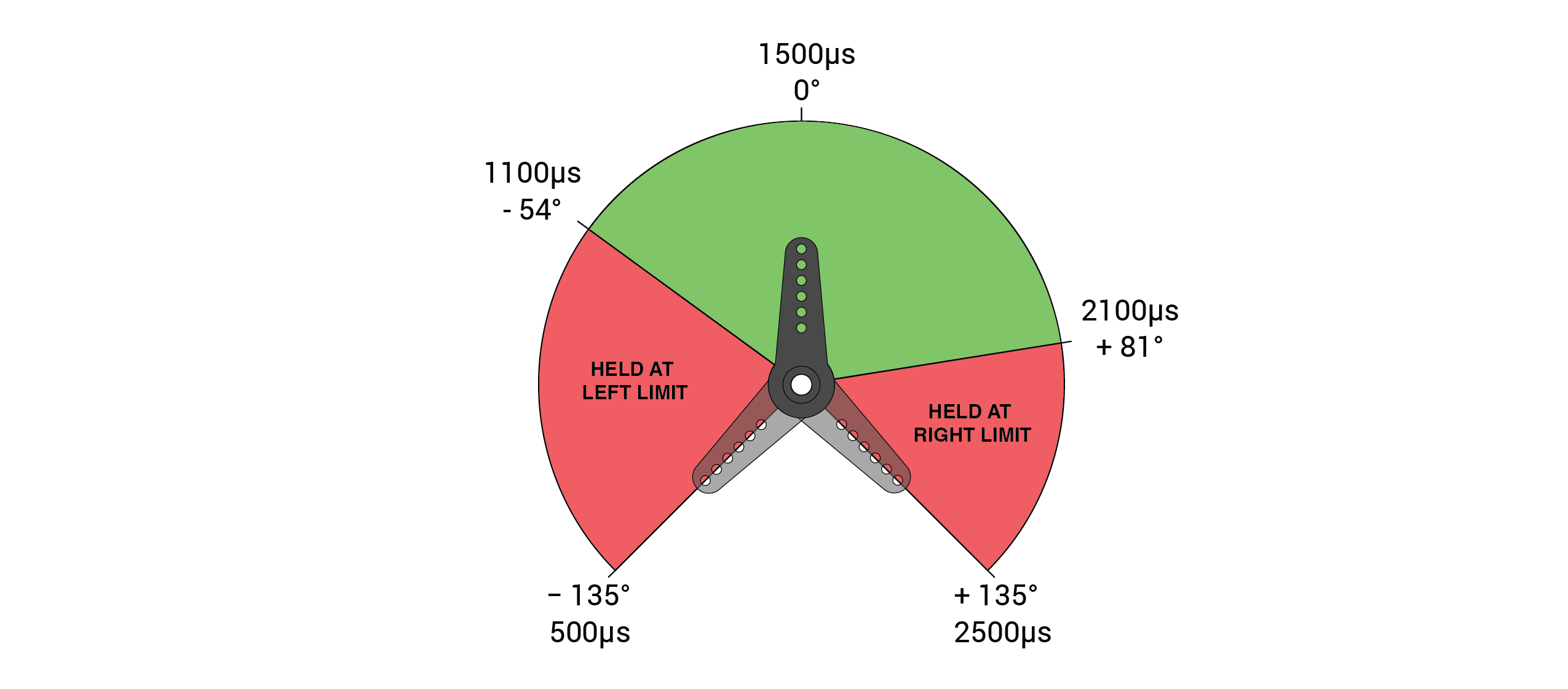
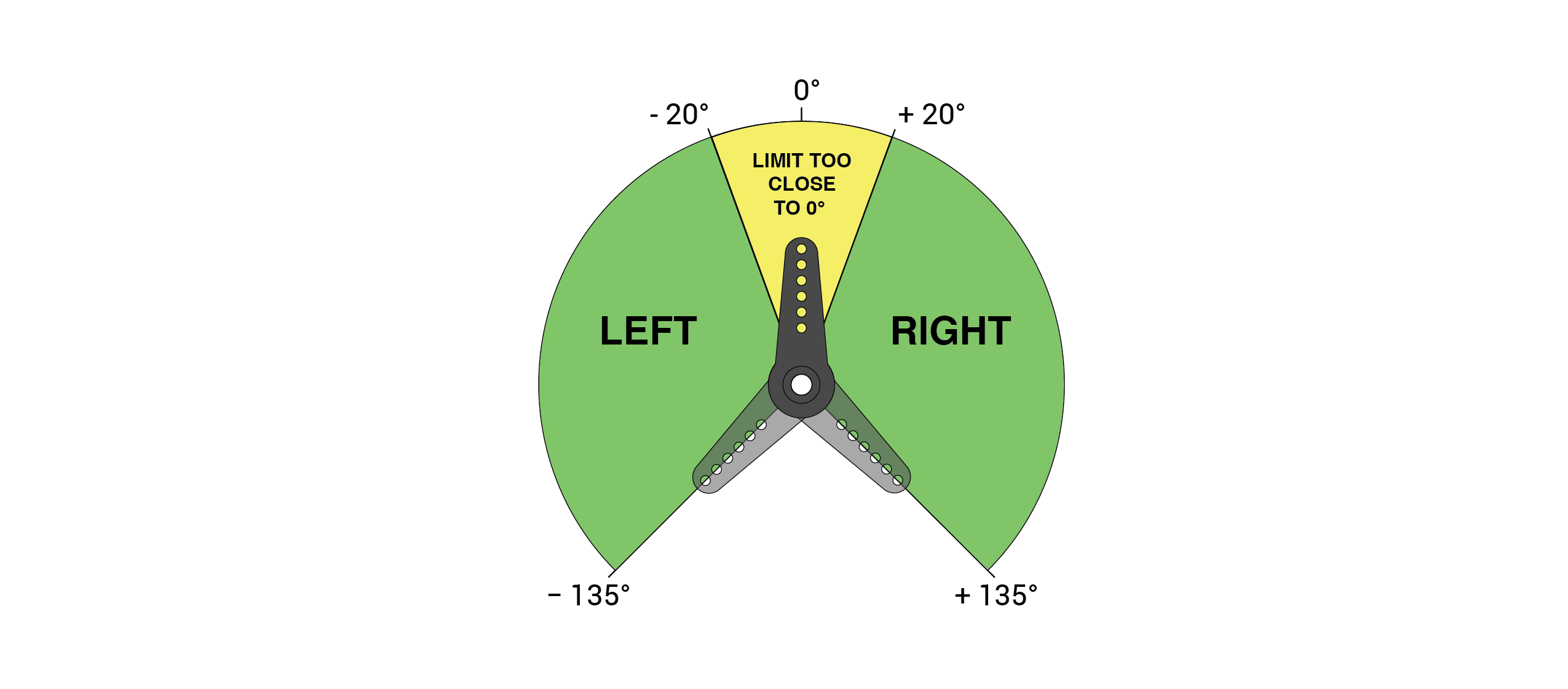
O SRS pode ser facilmente configurado com o Programador SRS para limitar os movimentos para a direita e para a esquerda em dois ângulos definidos pelo usuário. Pulsos de entrada que ocorrem além dos limites serão ignorados, e o SRS manterá o ângulo limite. Qualquer dois ângulos podem ser definidos como limites, desde que o limite esquerdo esteja à esquerda da faixa morta central e o limite direito esteja à direita da faixa morta central. A tabela abaixo mostra as regiões válidas para os limites esquerdo e direito.
Uma vez que limites válidos são programados, o SRS ignorará quaisquer pulsos que excedam esses limites e manterá o ângulo limite. Por exemplo, a imagem abaixo mostra o que aconteceria se um limite à esquerda de -30° e um limite à direita de +60° fossem configurados.