Usaremos ao longo desse livro o termo SRS para nos referirmos a "Servo robô inteligente", é a sigla usada para denominar o termo "Smart Robot Servo" (SRS)
O REV Robotics Smart Robot Servo (SRS) (REV-41-1097) é um servo com engrenagens de metal configurável que elimina a incerteza na hora de alinhar e ajustar mecanismos baseados em servo. Um SRS pode ser usado como um servo angular padrão, um servo angular personalizado e um servo de rotação contínua, bastando alterar suas configurações.
É o servo o atuador adequado para o seu mecanismo? Consulte a seção "Escolhendo um Atuador" da REV Robotics para saber mais.
## **Modos operacionais** Pronto para uso, o SRS opera como um servo de 270°. No entanto, o Programador SRS da REV pode reconfigurar o SRS para definir limites angulares ou alterná-lo para um modo de rotação contínua.Para obter mais informações sobre como usar o programador SRS para alterar os modos do servo, consulte a seção "Programador SRS".
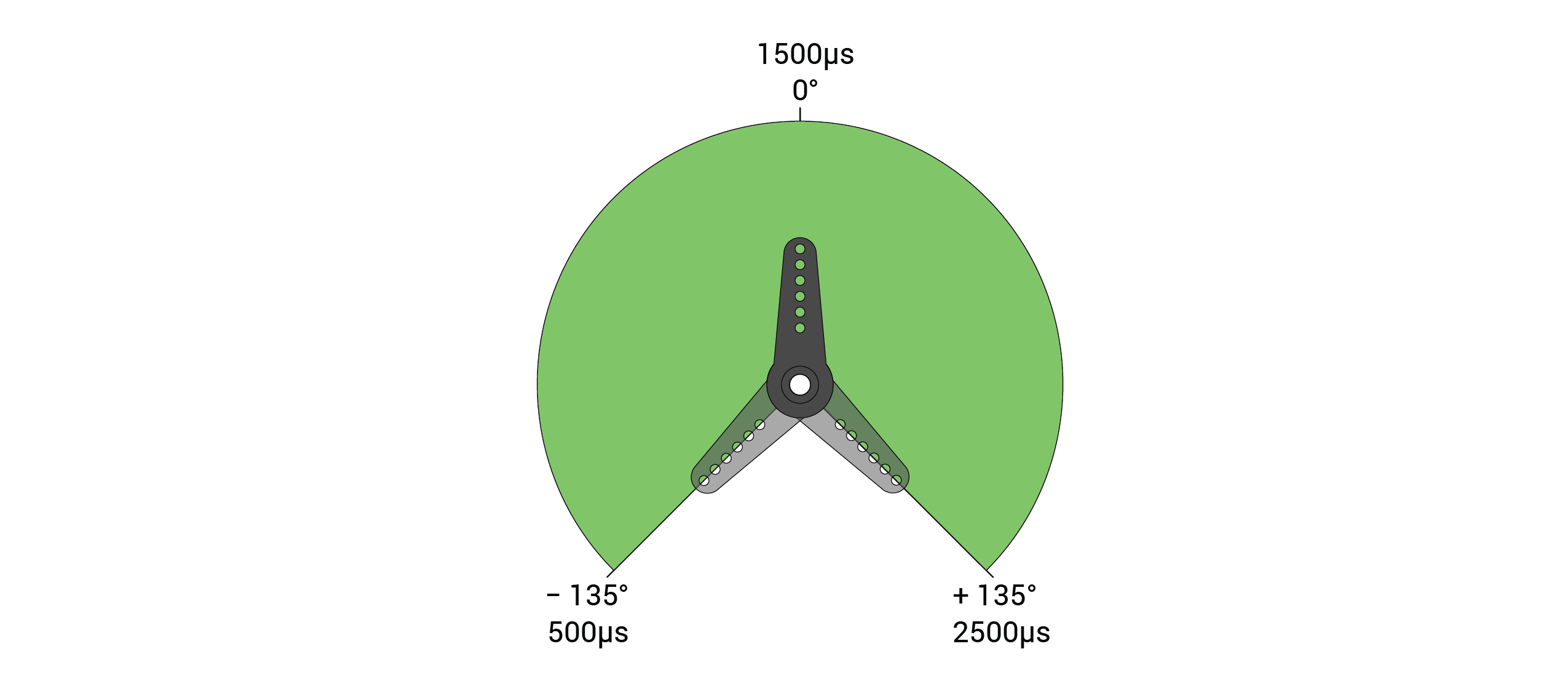
### **Modo padrão** A faixa padrão para o SRS é de 270°. Essa faixa é mapeada para uma faixa de pulso de entrada de 500μs a 2500μs, com 1500μs como ponto central. A imagem abaixo descreve a relação entre pulso e ângulo.
Tamanho do puldo é abreviado como PW (Pulse Width)
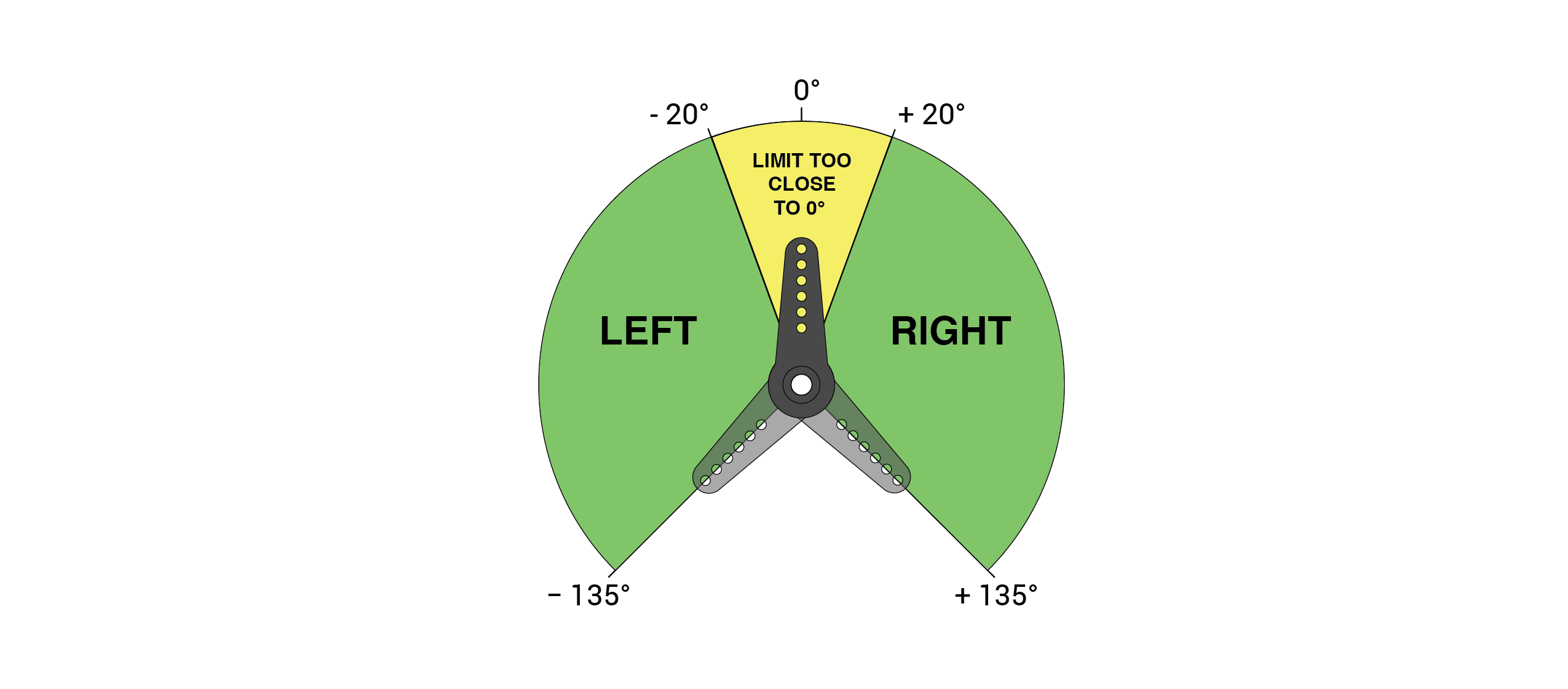
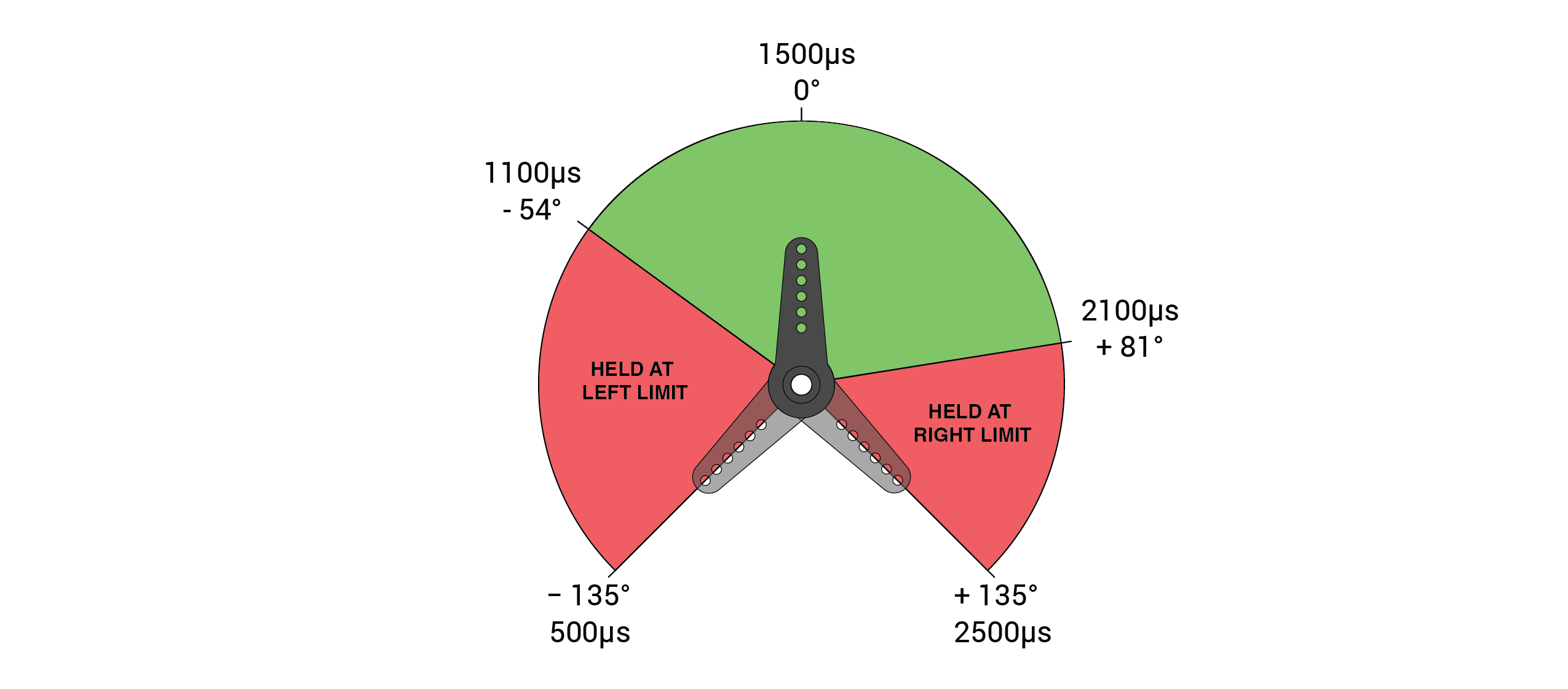
| Tamanho do pulso (us) | 500 | 500 < PW < 1500 | 1500 | 1500 < PW < 2500 | 2500 | | --- | --- | --- | --- | --- | --- | | Direção | Horário | Horário | Parado | Anti-horário | Anti-Horário | Velocidade | Máxima | Proporcional | Parado | Proporcional | Máxima | ### **Limites angulares** O SRS pode ser facilmente configurado com o Programador SRS para limitar os movimentos para a direita e para a esquerda em dois ângulos definidos pelo usuário. Pulsos de entrada que ocorrem além dos limites serão ignorados, e o SRS manterá o ângulo limite. Qualquer dois ângulos podem ser definidos como limites, desde que o limite esquerdo esteja à esquerda da faixa morta central e o limite direito esteja à direita da faixa morta central. A tabela abaixo mostra as regiões válidas para os limites esquerdo e direito.