
Configurando o Taura
Este guia resume os parâmetros ajustáveis no software do programador do servo Taura e como cada ajuste afeta o acionador.
Antes de começar
- Conecte o programador ao PC e, em seguida, ligue o servo ao cabo do programador.
- Ao plugar o servo, o software lê automaticamente os parâmetros atuais.
O servo deve ser conectado com o cabo de sinal no mesmo sentido do LED do programador.
Botões e menus do software

-
Read
- Lê os parâmetros atuais do servo e preenche a tela com os valores efetivamente gravados no dispositivo.
-
Write
- Grava no servo todas as alterações feitas na tela. Use após ajustar parâmetros.
-
Save
- Salva um arquivo com os parâmetros atualmente exibidos no software, para reutilizar em outras unidades ou versionar configurações.
Coloque a extensão .svo no nome do arquivo para que funcione corretamente.
-
Open
- Carrega um perfil salvo previamente para a tela. Após abrir, clique em Write para aplicar esses valores ao servo conectado.
-
Default / Factory Default
- Não disponível
-
UPF / Firmware Update
- Abre o utilitário de atualização de firmware. Escolha o arquivo correto para o seu modelo e para o modo desejado (Angular/Continuous).
Não desconecte o servo durante o processo.
-
Model/Info (varia conforme versão)
Mostra informações do servo: modelo, fabricante e versão de firmware.
Parâmetros básicos
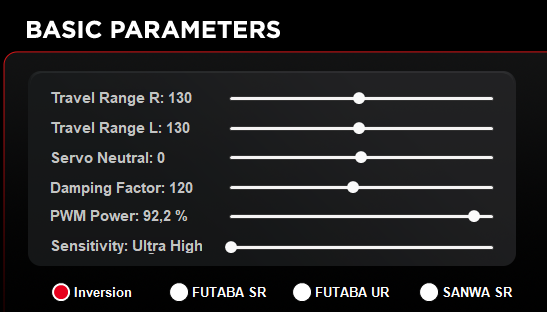
Travel Range (Ângulo de Percurso)
Define o ângulos máximo e mínimo do servo.
O valor mostrado é um indicador para ajuste relativo (não é um ângulo absoluto garantido para todos os modelos).
- Aumentar o valor amplia o ângulo; reduzir limita a rotação.
255 significa o limite máximo do servo, NÃO é o valor em graus do limite.
Servo Neutral (Ponto Neutro)
Ajusta o centro do servo (posição quando o sinal é neutro).
PWM Power (Potência PWM)
Controla a o torque e velocidade do servo.
Lembre-se que quanto maior esse valor maior é o consumo de corrente elétrica do servo.
Damping Factor (Fator de Amortecimento)
Define o amortecimento do controle interno. Amortecimento mais alto ajuda a reduzir oscilações após chegar ao alvo; muito alto pode deixar respostas mais lentas.
Sensitivity / Dead Band (Sensibilidade / Faixa Morta)
Ajusta a faixa morta do erro de posição. É dividido nos seguintes níveis:
- Low
- Medium
- High
- Ultra High
Modos de protocolo/alta velocidade
- FUTABA SR
- SANWA SR
- FUTABA UR
Os modos acima não são suportados pelo servo Taura.
-
Inversion
- Define o sentido de rotação (normal/invertido). Use para adequar o sentido ao seu mecanismo sem precisar reverter no Control Hub.
Proteções
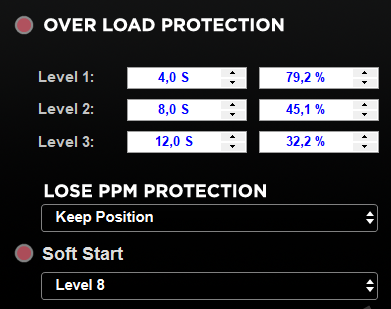
Signal Loss Protect (Perda de Sinal)
Configura o comportamento em perda de sinal:
- Manter posição;
- Ir a posição neutra (1500us);
- Desabilitar força.
Over Load Protect (Proteção contra Sobrecarga)
Ao habilitar, você pode definir três níveis (Level 1/2/3), cada um com:
- Tempo de disparo (quando a proteção entra após detectar carga excessiva).
- Potência de saída permitida após o disparo (quanto o servo “alivia”).
Em geral, o controle à esquerda ajusta o tempo até acionar; à direita ajusta a potência/força restante após a proteção. Isso reduz aquecimento e dano quando o servo fica travado.
Soft Start (Partida Suave)
Faz o servo iniciar suavemente após energizar: ao ligar, ele vai devagar para a posição correspondente ao sinal atual, reduzindo trancos no sistema.
- É dividido em 11 níveis.
Quanto maior o nível, mais rapidamente ele chega a posição inicial após a energização.
Esse controle é independente do PWM Power.
Modo contínuo
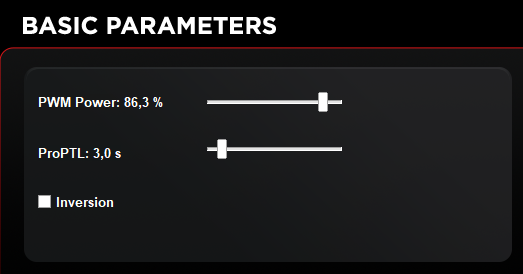
PWM Power
Define a velocidade e torque do servo no modo contínuo.
Use valores acima de 10,2%.
ProPTL
Configura o tempo até a proteção de bloqueio ser ativada e o servo parar.
Inversion
Define o sentido de giro do servo.