
Inicio Rápido
Isto vai orientar você na configuração de um Odometry Computer em um robô com dois Odometry Pods.
- Monte o seu Pinpoint com o adesivo voltado para cima no chassi.
- Monte dois pods de odometria no robô, com um rastreando para frente (o pod X) e um rastreando lateralmente (o pod Y).
- Ligue o seu sistema e certifique-se de que você está lendo dados do dispositivo. Estaremos fazendo referência à posição estimada do robô nestes passos.

Calcule e defina a calibração da Resolução do Encoder para os pods de odometria que você está usando.
Se você estiver no FTC, e usando pods goBILDA®, basta informar qual deles é. Essa conta já está feita.
odo.setEncoderResolution(GoBildaPinpointDriver.GoBildaOdometryPods.goBILDA_4_BAR_POD);
//odo.setEncoderResolution(13.26291192, DistanceUnit.MM);
Certifique-se de que as leituras de heading e posição do robô estão estáveis. Elas não devem mudar enquanto o robô não estiver se movendo. Se mudarem, envie um comando resetPosAndIMU, ou clique no botão Reset no Pinpoint.
Verifique se o Status do Dispositivo está como Ready ou se o LED no Pinpoint está verde.
Se estiver Roxo, Azul, ou Laranja, verifique seus pods e certifique-se de que eles estão conectados corretamente.Mova o robô para frente sem girá-lo. Certifique-se de que a posição X estimada aumenta.
Se X diminuir, inverta a direção do Encoder X definindo a X Encoder Direction como reversed.
Se Y se mover mais do que X, certifique-se de que o pod conectado à porta X está rastreando para frente.
Se nenhum dos valores se mover, certifique-se de que seu pod X está funcionando.Mova o robô para a esquerda sem girá-lo. Certifique-se de que a posição Y aumenta.
Se Y diminuir, inverta a Y Encoder Direction.
Se nenhum dos valores se mover, certifique-se de que seu pod Y está funcionando.
odo.setEncoderDirections(GoBildaPinpointDriver.EncoderDirection.FORWARD, GoBildaPinpointDriver.EncoderDirection.FORWARD);
Meça os seus Pod Offsets
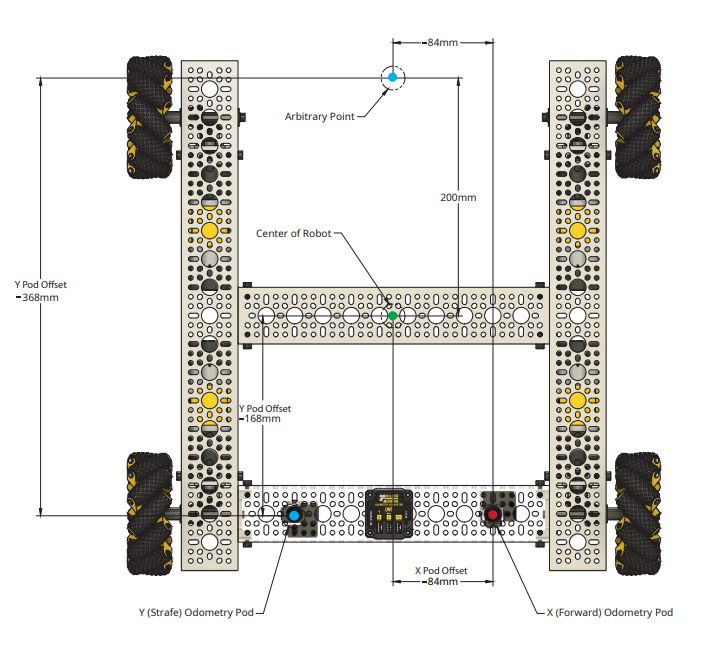
- Grave
2/3,ose grave esses offsetsOffsets noPinpoint.
odo.setOffsets(-84.0, -168.0, DistanceUnit.MM);
Gire o seu robô ao redor do ponto de rastreamento sem deslizar o robô para frente ou para os lados. As posições X e Y devem permanecer relativamente baixas. Se elas variarem em mais de ~100mm ou 4”, verifique novamente os seus Pod Offsets. O problema mais comum aqui é que um dos offsets está positivo quando precisa estar negativo.
Gire o robô uma volta completa no sentido anti-horário. O heading deve indicar muito próximo de exatamente uma rotação positiva.
Usando uma fita métrica, mova o seu robô ao longo do campo e meça o quanto ele se moveu, e compare isso com o quanto o Pinpoint informa que ele se moveu. Se esses valores forem significativamente diferentes, verifique novamente a sua configuração de ticks-per-mm.
Redefina a posição estimada (com o botão ou com o seu código) e dirija o robô um pouco antes de retornar ao ponto de partida. Os valores devem estar próximos de zero. Se tudo estiver funcionando, espere ver o seu robô retornar para dentro de cerca de 10mm (~0.5”) da posição inicial. Um valor maior é um bom indicativo de que algo está errado.
Em circunstâncias normais, não é necessário ajustar o Yaw Offset.