
NI RoboRIO
O RoboRIO é o cérebro do robô, ele é responsável por armazenar o código e coordenar todas ações da máquina, assim, deve-se exercitar cuidado máximo ao manuseá-lo, sendo bastante sensível a lascas de alumínio.
Ele é capaz de exercer diversas operações matemáticas complexas, o que é essencial para que a máquina tenha o melhor desempenho possível.
Há várias interfaces, como PWM, CAN, SPI e barramentos digitais e analógicos.

Lembrete: Antes de utilizar seu roboRIO você deve atualizá-lo para o firmware e imagem mais recentes (role até o final da página para encontrar o tutorial).
Ele pode ser programado em LabVIEW, Java e C++.
Descrição de cada interface do roboRIO
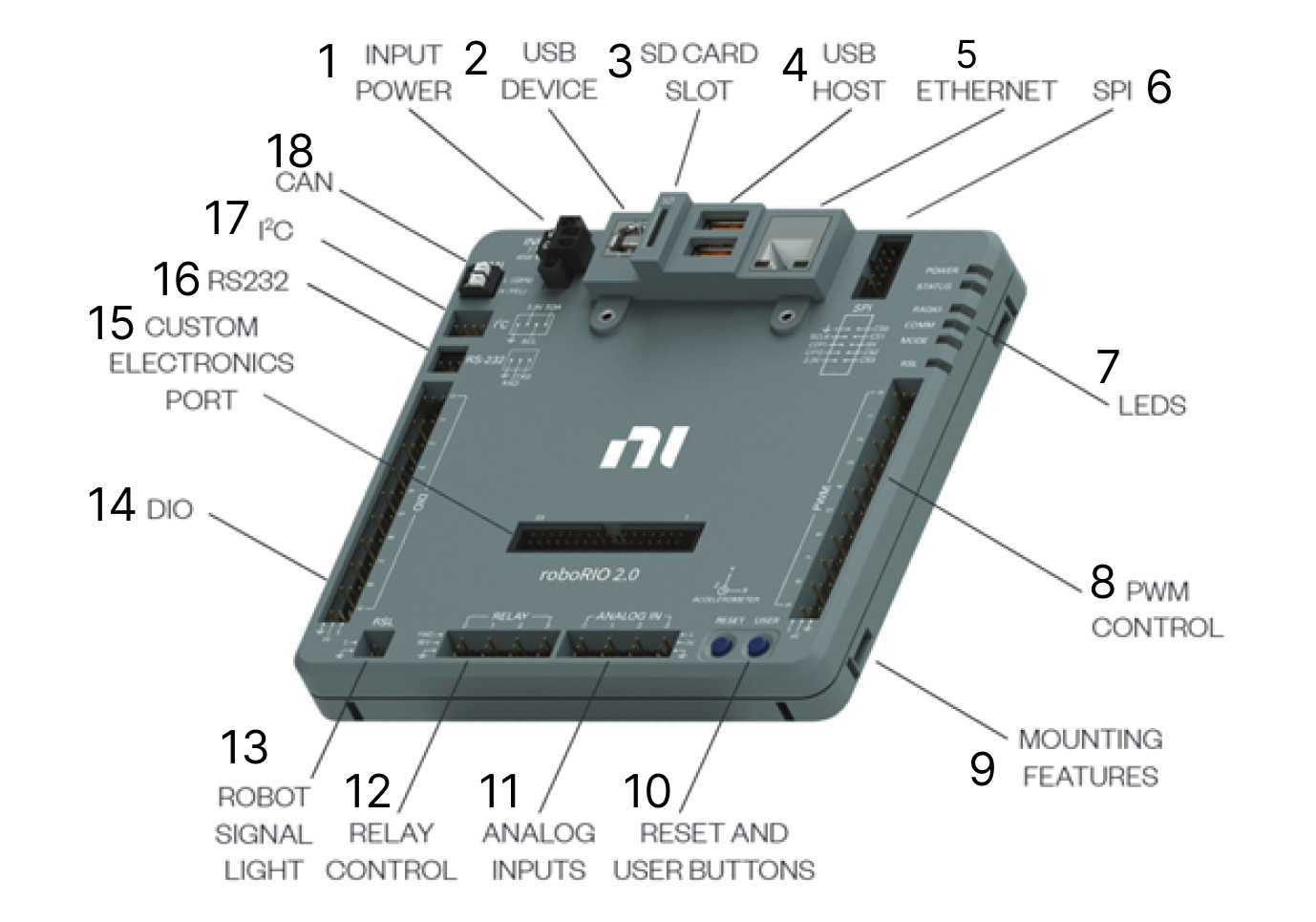
- Onde se conecta os cabos que energizam o Roborio, vindos da PDP
- Para conectar o cabo USB A para USB B (conexão com o computador)
- Entrada para cartão microSD
- Host USB, podendo ser usados para câmeras e co-processadores
- Para conectar o Rádio ou computador via Ethernet
- Porta de comunicação tipo SPI
- Sinalizam por meio de cores o status do RoboRIO
- Portas para comunicação PMW
- Para auxiliar a fixar o RoboRIO no robô
- Reset - Reinicia o RoboRIO; User - Botão programável
- Barramento para leitura analógica
- Porta para conectar relés (Exemplo: Spike)
- Para conectar a RSL
- Barramento de leitura e escrita digital
- Porta para circuitos adicionais e expanção(MXP)
- Porta para comunicação via RS232
- Entrada para a comunicação tipo I2C
- Entrada para a comunicação tipo CAN (início da linha CAN)
Guias
Link para a página do fornecedor
Documentação oficial da FIRST e WIP sobre o RoboRIO e LabVIEW - a stemOS em colaboração com a equipe Under Control 1156, traduziu o material para português.
Tutorial para atualizar o firmware e a imagem