
Instalação do Hub
Sob o SDK 8.1, você pode especificar a orientação física do Hub no robô. Isso permite que você receba valores de ângulo da IMU expressos nos eixos do robô, o que é útil para entender e gerenciar o movimento do robô.
Antes de começar a programar, vamos discutir suas opções para montar fisicamente o Hub no robô. Em geral, a montagem do Hub pode ser considerada Ortogonal ou Não-Ortogonal.
Montagem Ortogonal
Imagine um cubo em qualquer lugar do seu robô, paralelo ao chão, com um lado plano voltado exatamente para a "frente" designada do seu robô. Coloque o Hub em uma dessas faces do cubo, com as bordas retas do Hub paralelas ao cubo.
Se essa descrição corresponder à orientação do seu Hub, use o método Ortogonal para especificar sua orientação. Veja a seção de Programação da IMU abaixo.
Aqui estão alguns exemplos comuns:
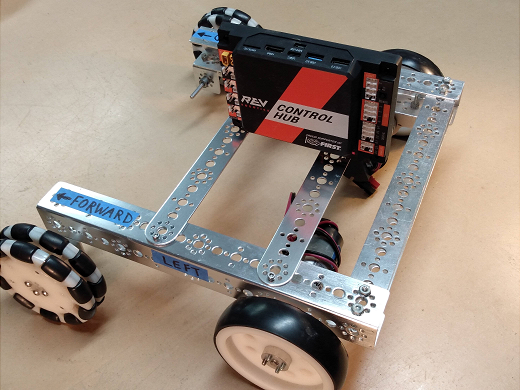
Logo Up, USB Forward

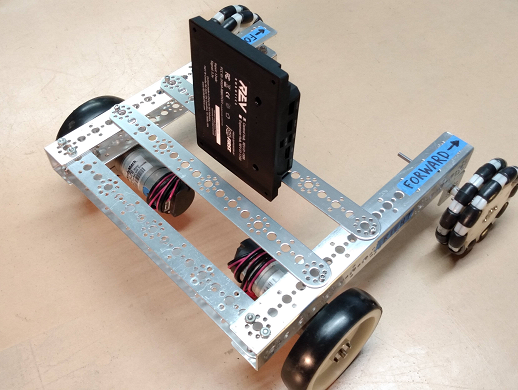
Logo Left, USB Up
Logo Right, USB Up
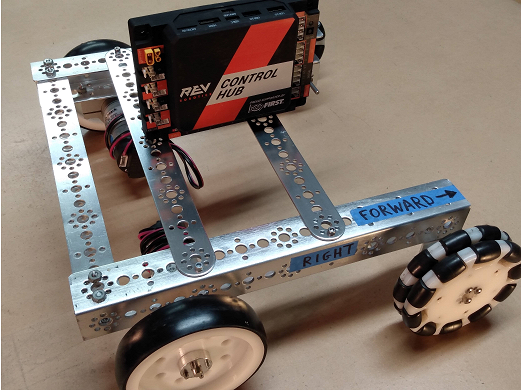
Logo Forward, USB Up

Logo Backward, USB Up

Logo Down, USB Forward

Logo Forward, USB Left

Logo Forward, USB Right
Logo Up, USB Backward

Com seis faces de cubo e quatro posições de 90 graus em cada face, existem 24 orientações ortogonais possíveis.
Montagem não ortogonal
Aqui estão alguns cenários, do mais simples ao mais complexo:
-
Imagine o mesmo cubo alinhado na frente, com o seu Hub em qualquer face. As bordas do Hub não são paralelas ao cubo. Ou seja, o Hub está apenas girado no plano (horário ou anti-horário, olhando para o logo REV).
-
O Hub está montado/tiltado em algum ângulo oblíquo a partir de uma face no cubo imaginário. Nesse único ângulo inclinado, o Hub não está girado no plano (horário ou anti-horário, olhando para o logo).
-
O Hub está inclinado em múltiplos ângulos, com ou sem rotação no plano.
Para quaisquer cenários Não-Ortogonais, o SDK 8.1 oferece duas maneiras de descrever a orientação do Hub. Veja as próximas páginas para o método de Ângulos e o método de Quaternion.