
Configuração do IMU
A configuração do IMU do robô é automática e não deve precisar de alterações. Mas aqui está como confirmar ou renomear o IMU configurado.
Em um aplicativo DS conectado, toque no ícone de 3 pontos no canto superior direito e depois toque em Configure Robot. Para qualquer configuração nova ou existente, toque em Control Hub Portal, e selecione o Hub com o IMU que você deseja usar. Normalmente, este será o Control Hub, seja ele antigo ou novo.
-
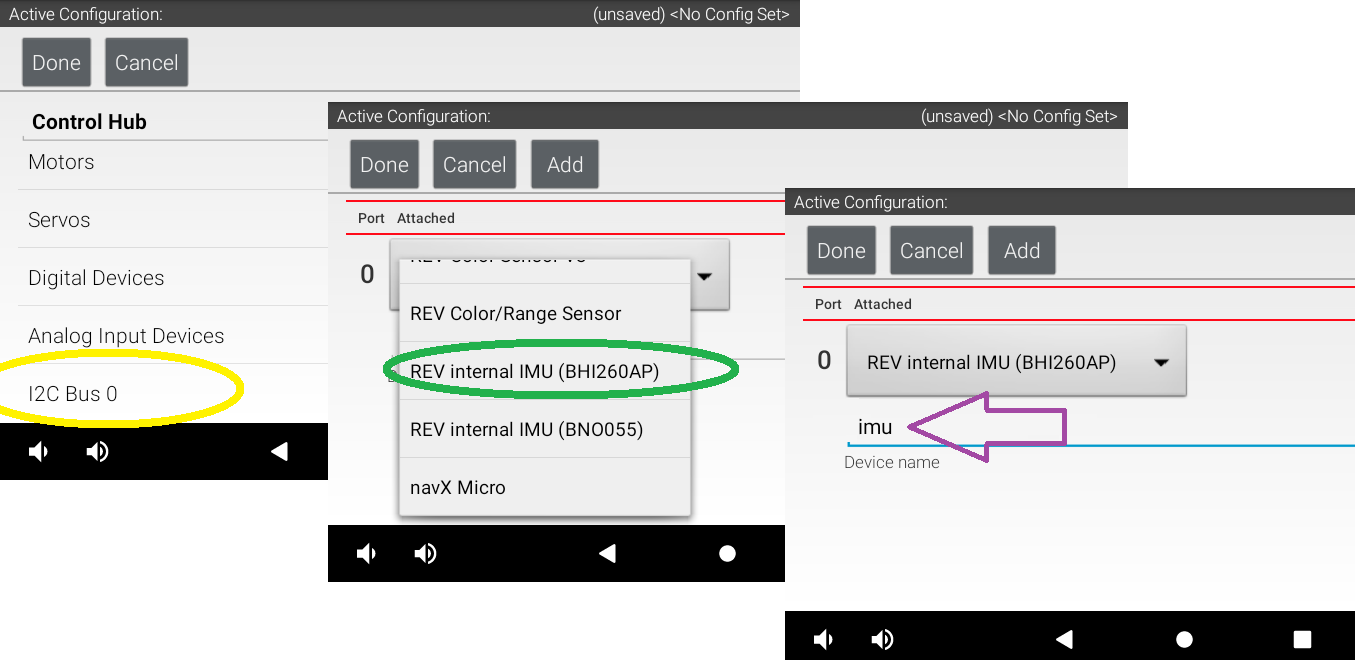
Amarelo: O IMU interno estará sempre conectado na I2C Bus 0, porta 0. Se você quiser outro dispositivo I2C também no Barramento 0, conecte-o ao Hub e use o botão Adicionar.
-
Verde: O tipo padrão de IMU exibido refletirá a unidade real neste Hub; corrija isso apenas se tiver sido modificado incorretamente. Seus OpModes de IMU exigem uma escolha correta aqui.
-
Roxo: O nome padrão do dispositivo é "imu", usado por todos os Sample OpModes para Blocks e Java. Você pode inserir um nome personalizado aqui, mas deverá atualizar todos os seus OpModes que fazem referência à IMU.
Quando terminar, salve e ative esta configuração.
Se um OpMode de Blocks estiver aberto na tela de programação do computador, feche e reabra esse OpMode para capturar a configuração atualizada. Os Blocks são fornecidos apenas para dispositivos na configuração ativa ao abrir um OpMode.
Definição dos eixos
A orientação do robô é definida usando o Sistema de Coordenadas do Robô, com 3 eixos ortogonais (a 90 graus entre si), com a origem localizada dentro do robô.
Você deve decidir qual face ou direção será considerada como "frente" do seu robô (que pode ter formato arredondado!).
Colocar uma etiqueta de fita com a palavra "FRENTE" na face ou borda frontal do robô, conforme decidido pela equipe, pode evitar confusões no futuro – de verdade!
-
O Heading (ou Yaw) é a medida de rotação em torno do eixo Z, que aponta para cima em direção ao teto.
-
O Pitch é a medida de rotação em torno do eixo X, que aponta para o lado direito do robô.
-
O Roll é a medida de rotação em torno do eixo Y, que aponta para a frente do robô.
Esses são os eixos do robô, diferentes (e não alinhados) dos eixos do Hub usados pelo driver antigo BNO055IMU.
A rotação segue a regra tradicional da mão direita: com o polegar apontando ao longo do eixo positivo, os dedos se curvam na direção da rotação positiva.
Fato interessante: o IMU está localizada aproximadamente abaixo da palavra "PROUD", perto do canto inferior direito do Hub.
Este tutorial não discutirá o Sistema de Coordenadas do Campo da FIRST Tech Challenge. Seus OpModes podem relacionar a orientação do robô com o campo geral ou as ‘coordenadas globais’ para navegação, mas isso está além do foco deste tutorial, que é o uso da IMU.