Solução de Problemas
Muitos problemas podem ser resolvidos por meio de solução de problemas sistemática sem a necessidade de contatar o suporte da stemOS ou REV. Olhe as dicas de solução de problemas abaixo para ajudar a determinar a causa do problema que você está vendo. Caso precise nos contatar, descrever os passos que você tomou em detalhes nos ajudará a colocá-lo em funcionamento rapidamente.
Dicas Gerais de Solução de Problemas
A chave para uma solução de problemas eficaz é isolar o problema. Muitos problemas podem apresentar o mesmo sintoma, então eliminar pontos de falha um por um é crítico para encontrar a causa raiz.
Isolar Problemas por Eliminação
Se possível, tente eliminar uma seção do sistema ao solucionar problemas. Por exemplo:
-
Elimine um problema de código ou de conexão de controle:
- Use o Cliente de Hardware REV para executar o SPARK MAX via USB.
- Esteja ciente da função de bloqueio do CAN do SPARK MAX. Se ele foi conectado ao barramento CAN do roboRIO, uma função de segurança dentro do SPARK MAX a comunicação USB será bloqueada. Desconectar do barramento CAN e reiniciar o MAX vai liberar o bloqueio.
- Se esta for a primeira vez que você está executando o REV Hardware Client, veja o Guia de Início ao REV Hardware Client para um tour do software e suas características.
-
Elimine um problema de código:
- Crie um programa de teste simples usando um Código de Exemplo do SPARK MAX.
-
Elimine um problema mecânico:
- Remova o motor do mecanismo ou use um motor diferente que gire livremente.
Usar a Driver Station
Um conjunto de ferramentas extremamente útil pode ser encontrado na Driver Station:
- Use o Visualizador de Log da Driver Station
- Olhe para a corrente do canal da PDH:
- Uma corrente maior que a esperada em um canal pode indicar problemas mecânicos e elétricos.
- Olhe para a tensão da bateria:
- Grandes quedas na tensão da bateria no momento de um problema podem indicar problemas de saúde da bateria que causam brownouts.
- Use a Aba CAN/Energia
- Olhe para a Utilização do Barramento CAN.
- Olhe para Falhas no CAN.
- Olhe para Falhas de Comunicação:
- Falhas de comunicação podem afetar o SPARK MAX. Se ele perder a comunicação com o roboRIO, ele irá para um estado de desativado. Isso pode parecer uma falha momentânea em um motor girando se as falhas de comunicação são infrequentes e irregulares.
Usar as APIs
Também é muito útil registrar ou plotar valores operacionais internos do SPARK MAX. Esses valores podem ser acessados usando as APIs do SPARK MAX na sua programação. Alguns valores úteis como exemplo para registrar:
- getAppliedOutput()
- Este valor mostrará o que o SPARK MAX está realmente aplicando à saída do motor. Isso pode te ajudar a identificar problemas com o ajuste de controle de malha fechada.
- getOutputCurrent()
- Este valor mostrará a corrente de saída indo para as fases do motor. A corrente de saída não será sempre a mesma que a corrente de entrada medida pela PDH. Saber a corrente de saída é útil para diagnosticar problemas de limite de corrente se os motores estiverem superaquecendo.
- getBusVoltage()
- Uma maneira de medir a tensão de entrada diretamente no controlador.
- getStickyFaults()
- Uma falha persistente pode identificar um erro que você tenha observado no seu robô
Falhas e Problemas Comuns
Abaixo você encontrará alguns passos de solução de problemas para algumas falhas e problemas comuns relacionados à operação do SPARK MAX.
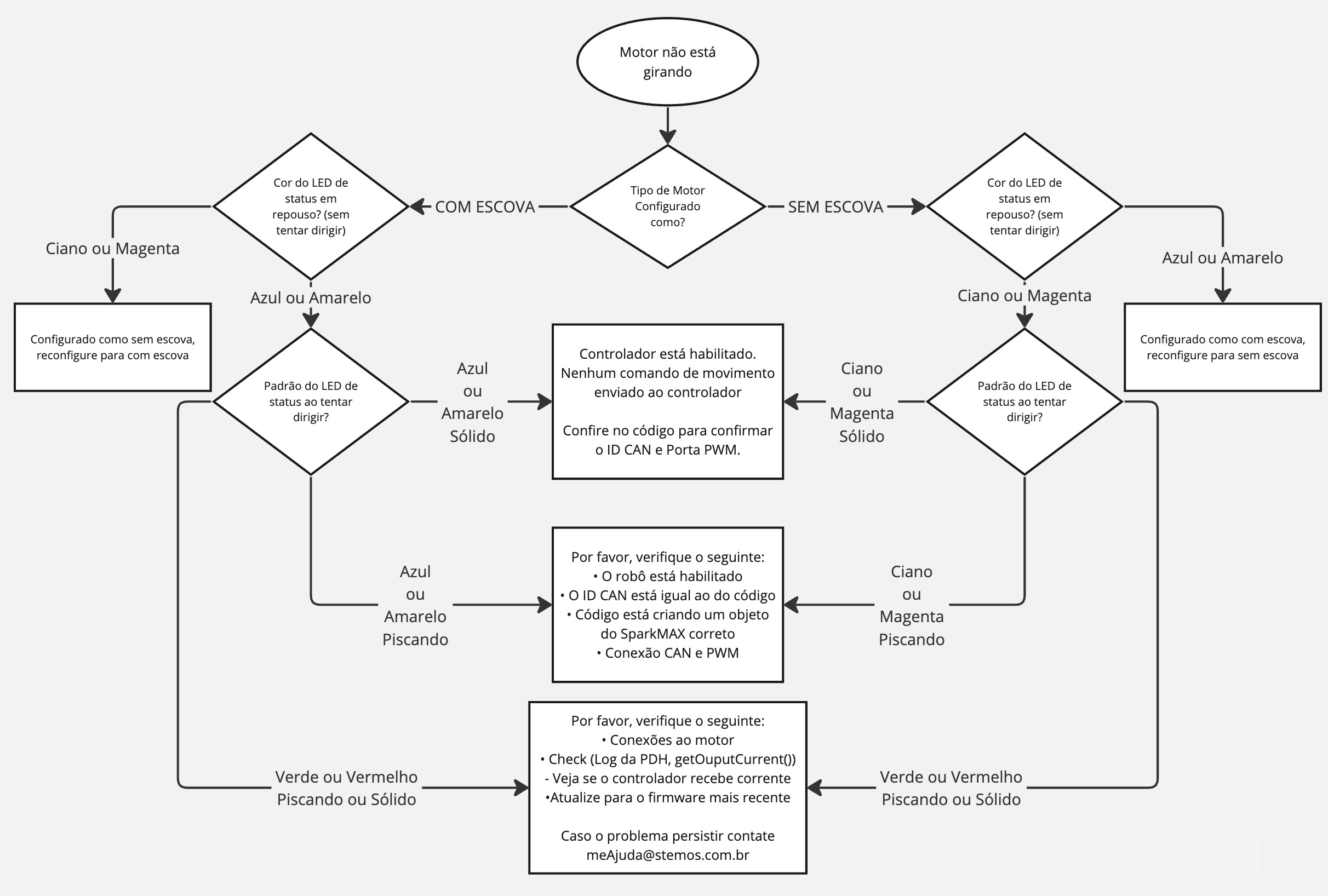
Motor não está girando
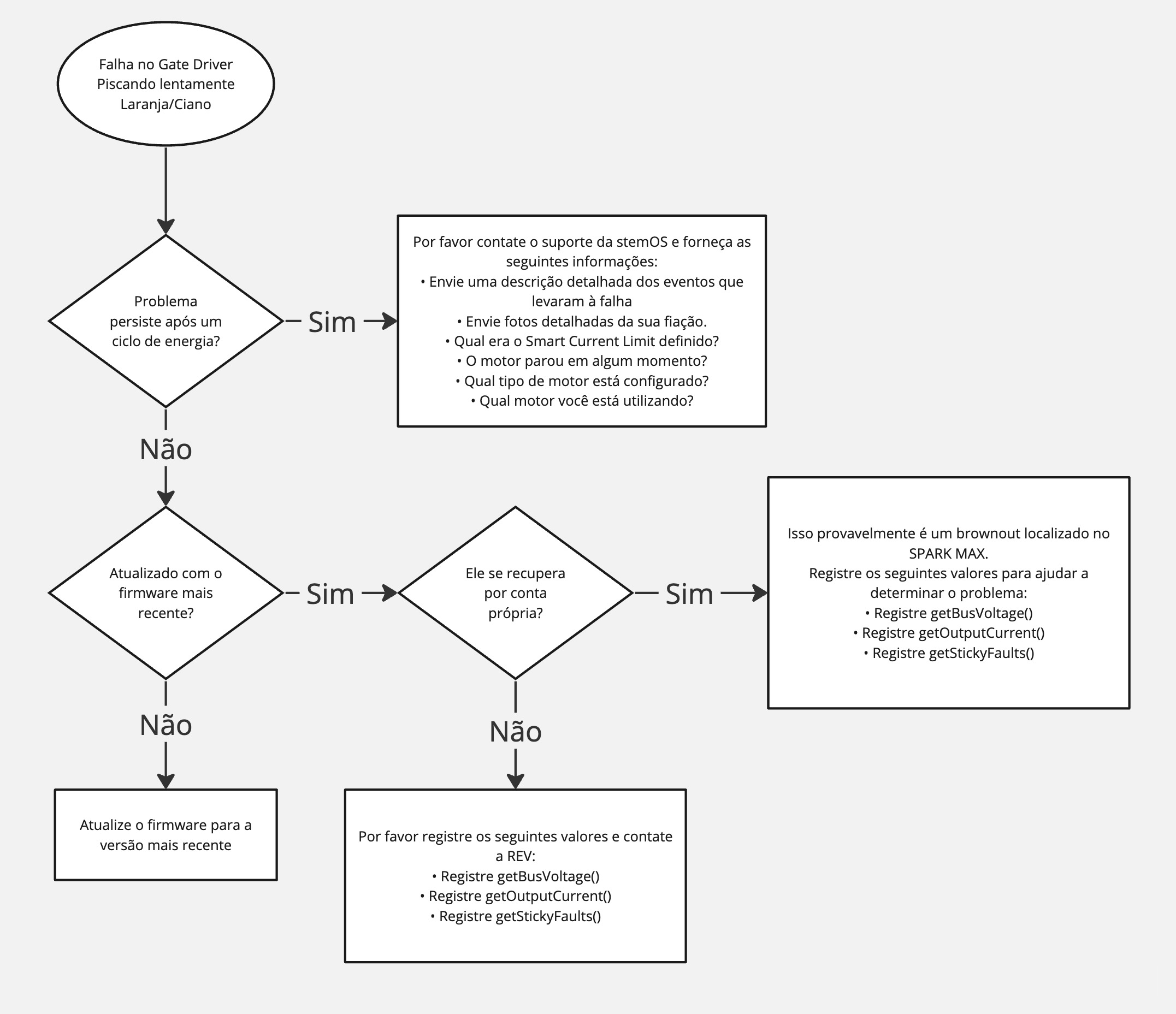
Falha no Gate Driver
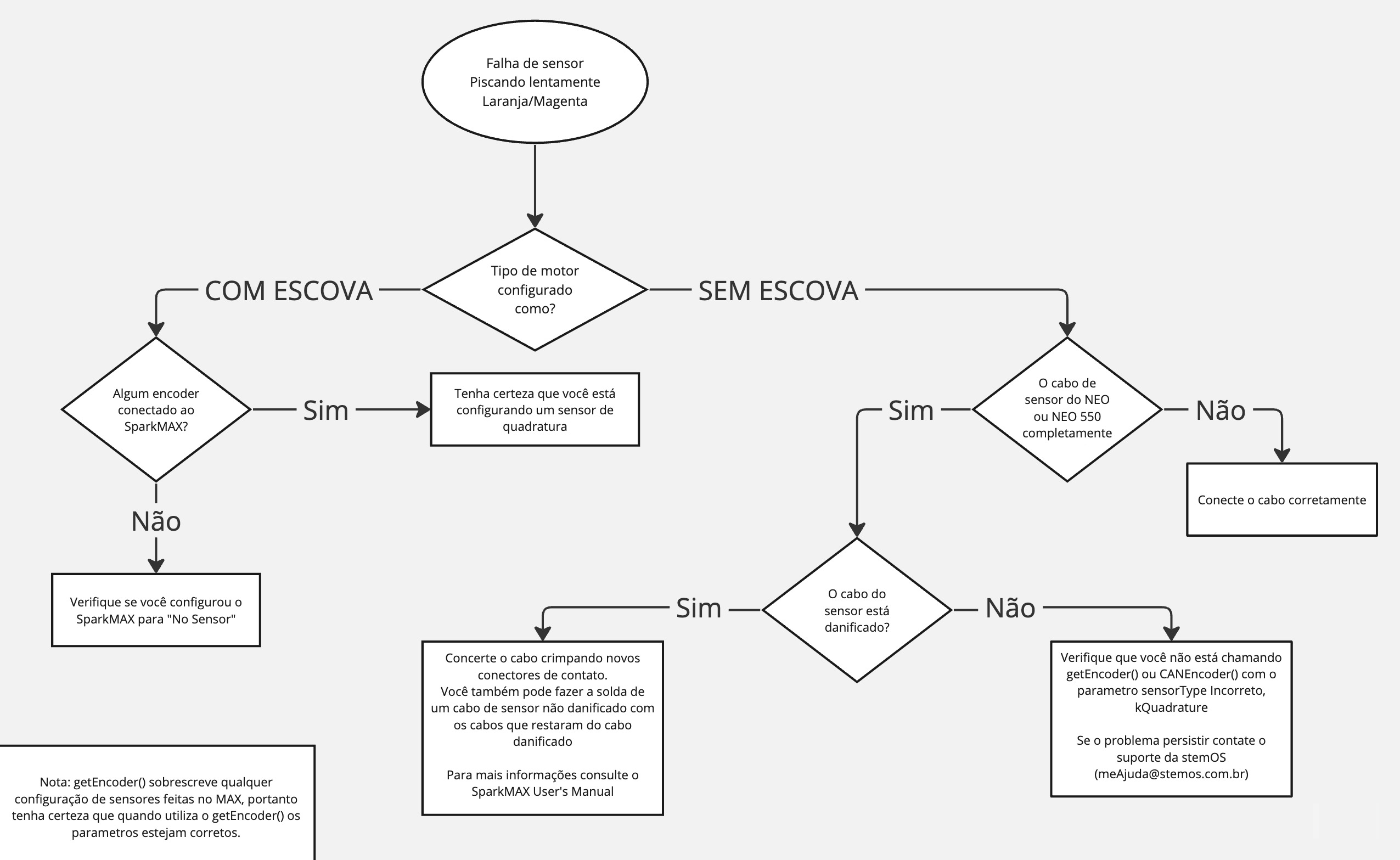
Falha de Sensor