Faça Girar!
Ligar
Agora que o dispositivo SparkMAX está conectado e as conexões foram checadas, ligue o robô. Você deveria ver o SparkMAX piscando lentamente, caso for um dispositivo novo a cor será magenta. Se o LED estiver apagado, ou estar piscando outra combinação, siga a cartilha do Status do LED para a procura de erros.
Se você estiver usando um motor com escova, poderá ver um erro no sensor. Isso é esperado até que você configure o dispositivo para aceitar um motor com escovas nas etapas a seguir.
Conecte ao SparkMAX
Plugue o cabo USB C no Spark e ao seu computador e inicie o Rev Hardware Client. Selecione o SparkMAX entre os hardwares conectados:
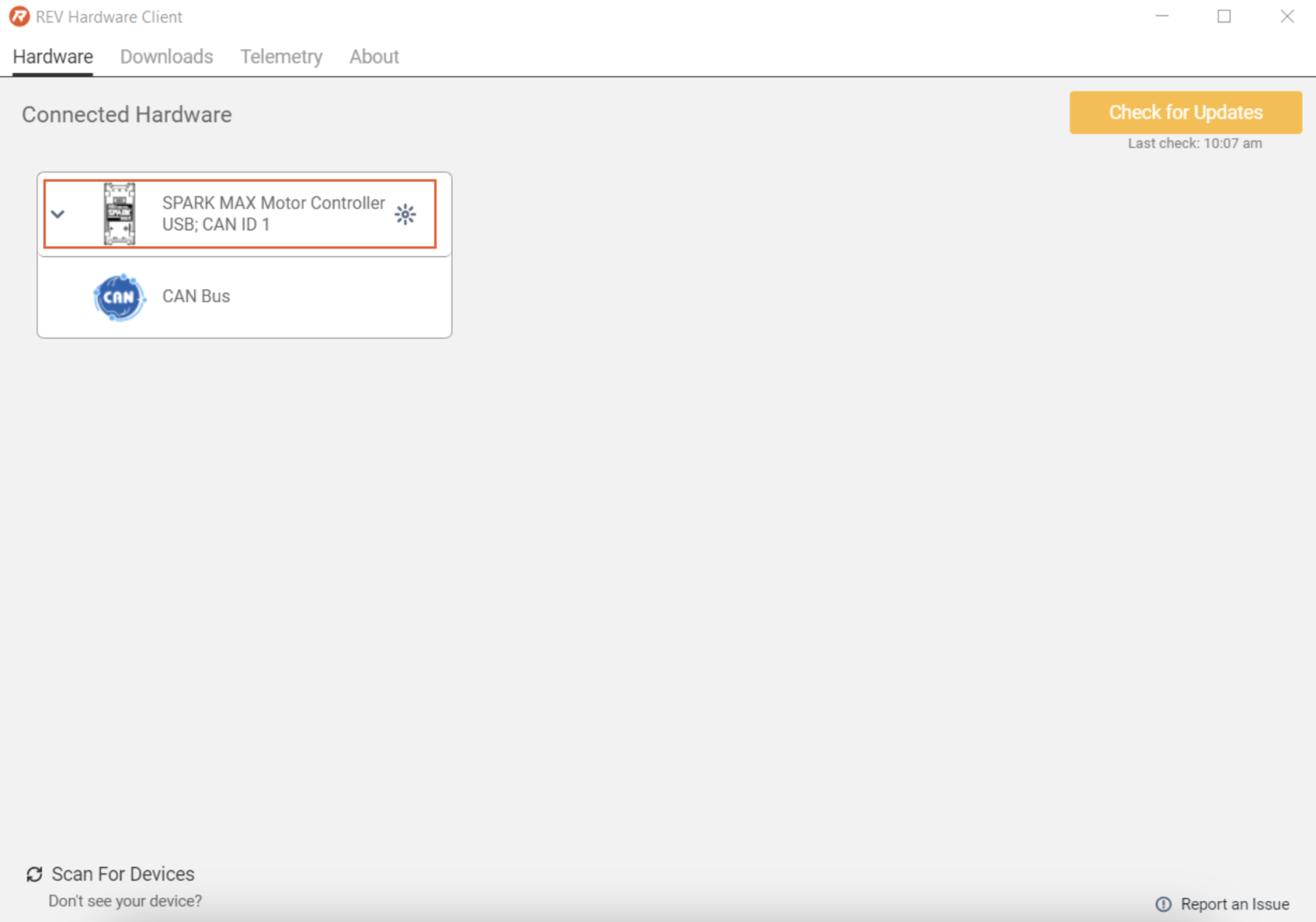
Se você não consegue ver o SPARK MAX, certifique-se de que o SPARK MAX não esteja sendo usado por outro aplicativo . Em seguida, desconecte o SPARK MAX do computador e conecte-o novamente.
Setup e configuração básica
Antes que qualquer parâmetro possa ser alterado, você deve primeiro atribuir um CAN ID exclusivo ao dispositivo. Pode ser qualquer número entre 1 e 63. Após definir um ID CAN exclusivo, a interface será atualizada e permitirá que você altere outros parâmetros.

Eventualmente você pode configurar uma rede CAN em sua bancada de testes ou robô. Certifique-se de que cada dispositivo na rede tenha um CAN ID exclusivo. É útil etiquetar cada dispositivo com seu número de identificação para ajudar na solução de problemas.
Definir Tipo De Motor
Se você estiver usando um NEO ou NEO 550, verifique se o tipo de motor está definido como REV NEO Brushless, o tipo de sensor é Hall Effect e o LED está piscando em magenta ou ciano.
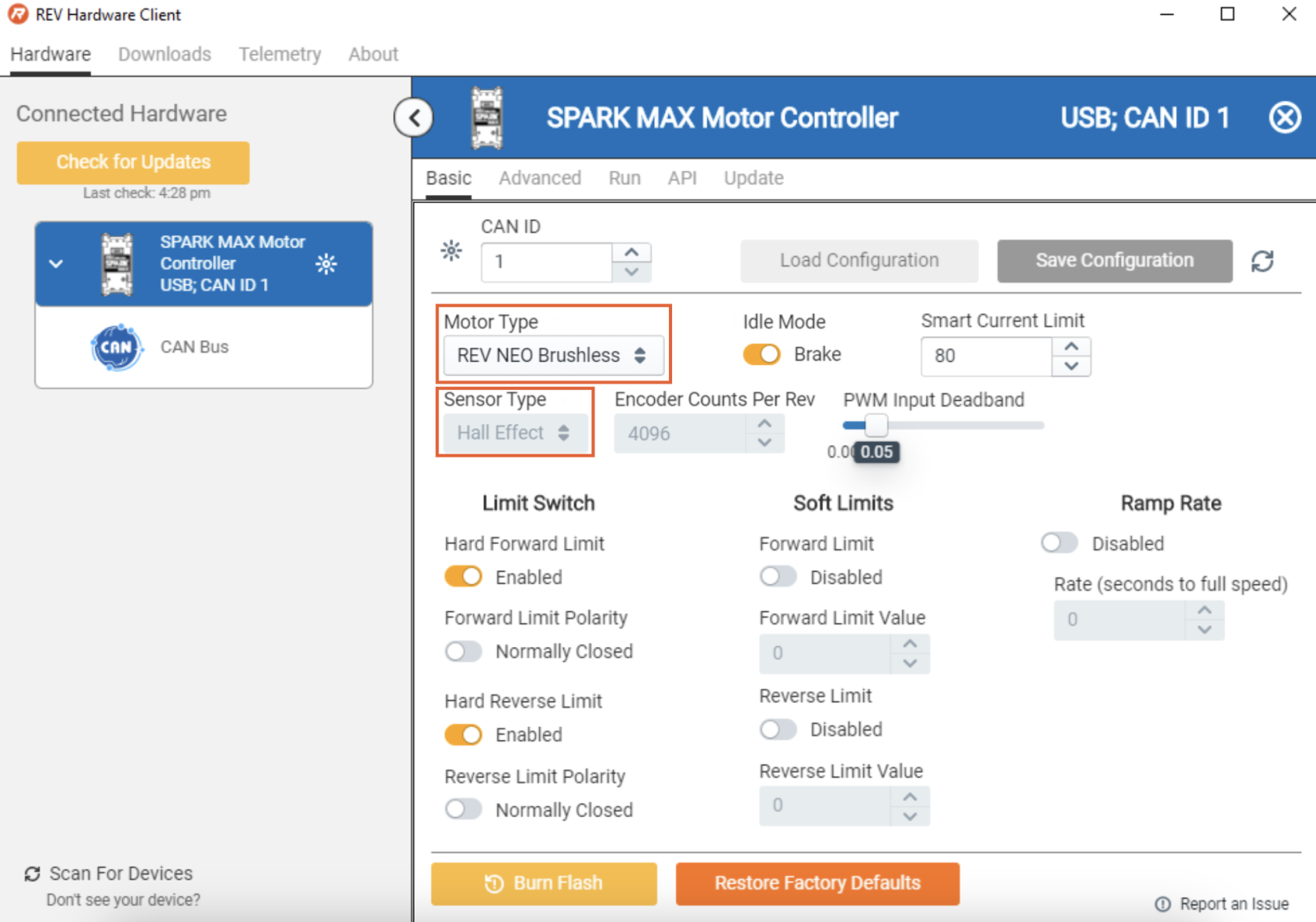
Se você ver um pisque do Spark que signifique uma Sensor Fault, confira se o cabo de encoder está conectado
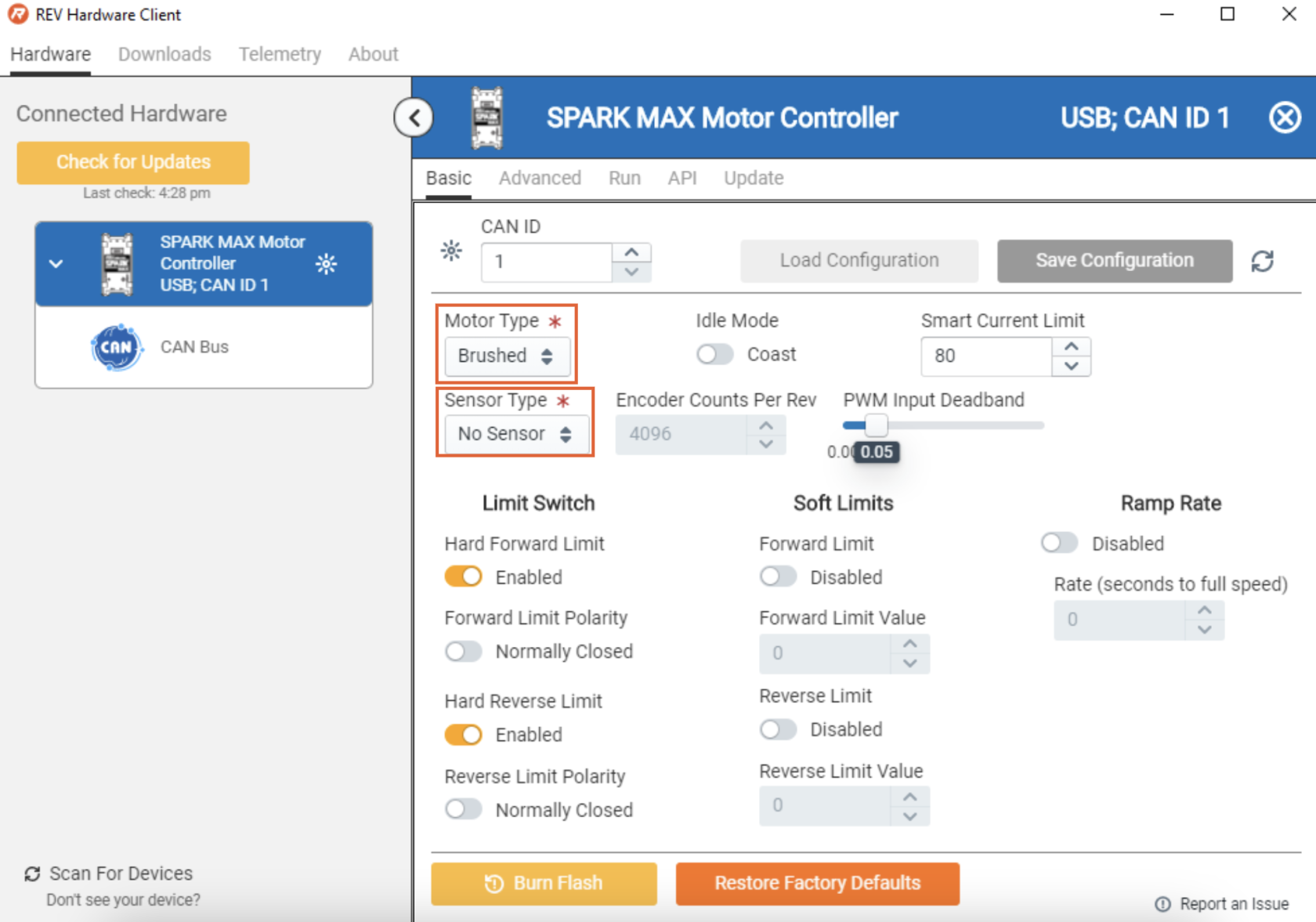
Se você estiver operando um motor com escova, defina o tipo de motor como Brushed, o tipo de sensor como No Sensor e verifique se o LED está piscando em Amarelo ou Azul.