
Cinemática da Mecanum
Cinemática Mecanum
O sistema de tração Mecanum é um tipo de sistema de tração muito popular na FTC®. Os sistemas de tração Mecanum permitem movimentos holonômicos. Isso significa que o sistema de tração é capaz de se mover em qualquer direção enquanto gira: para frente, para trás, de lado, transladando enquanto gira, etc. Aqui está um vídeo interessante demonstrando esse tipo de movimento.
Alguns dos COTS mecanum disponíveis: goBILDA Strafer Chassis Kit e REV Mecanum Drivetrain Kit.
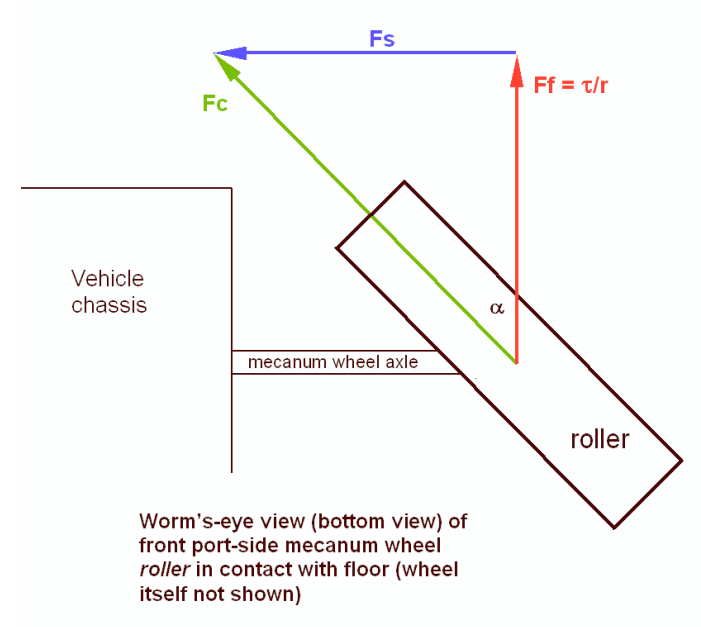
As rodas Mecanum possuem roletes em um ângulo de 45° em relação ao restante da roda. Como eles estão em contato com o solo em vez de algo sólido, como em uma roda de tração, em vez de a roda criar uma força paralela à sua orientação, ela gera uma força em um ângulo de 45° em relação à paralela. Dependendo de como as rodas são acionadas, os componentes X ou Y dos vetores de força podem se anular, permitindo o movimento em qualquer direção.
Usando vetores para criar movimentos omnidirecionais
Uma configuração padrão de tração Mecanum possui 4 rodas Mecanum orientadas em forma de "X". Isso significa que os roletes estão inclinados em direção ao centro quando vistos de cima. Essa configuração permite somar os vetores de força gerados pelos roletes deslocados e derivar o movimento em qualquer direção. É importante notar que, devido ao atrito, o movimento perfeito não é possível em todas as direções. Assim, um sistema de tração Mecanum será capaz de se mover ligeiramente mais rápido para frente/trás do que em outras direções. Combinar translação e rotação também resultará em um movimento mais lento.
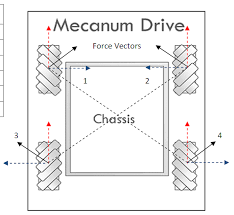
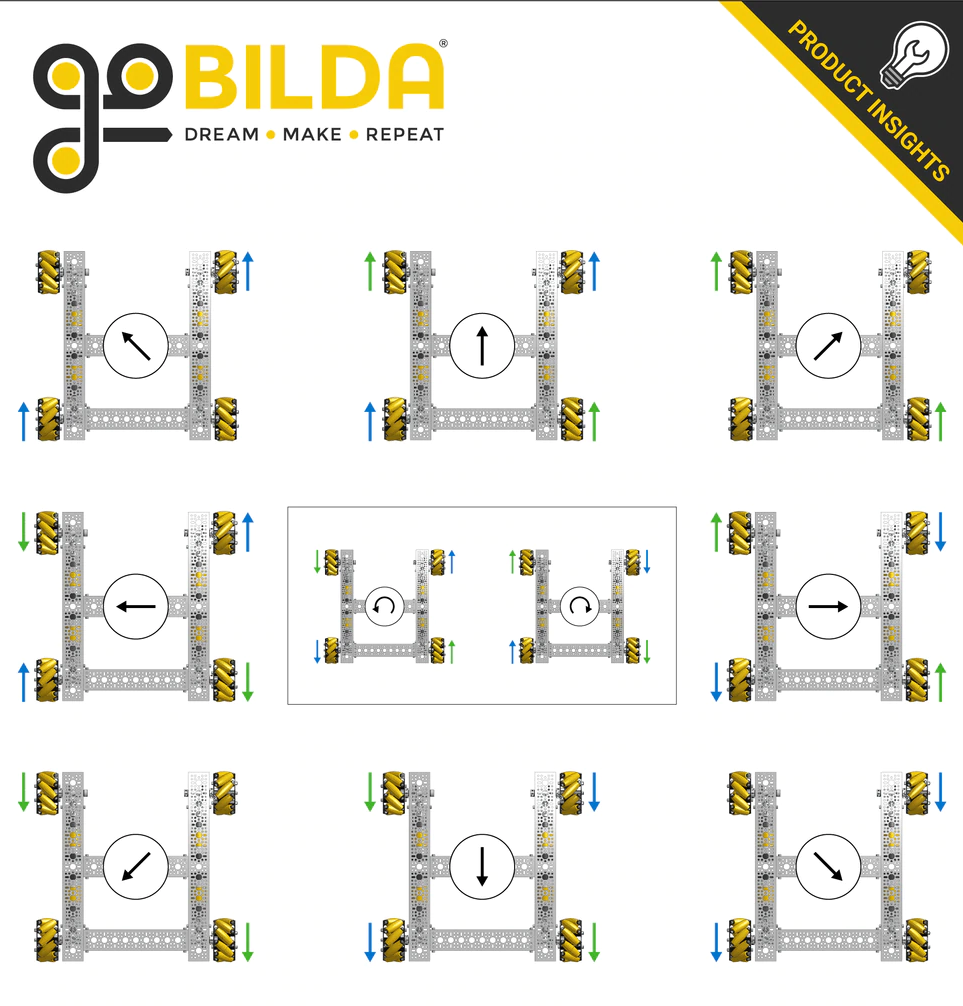
Na imagem acima, os vetores 1, 2, 3 e 4 representam os vetores de força criados pelas rodas Mecanum quando o chassi é movimentado para o topo da imagem. Todos os motores estão dirigindo para frente. As linhas azuis e vermelhas representam seus componentes X e Y, respectivamente. Aqui estão alguns exemplos de como as rodas devem ser acionadas para alcançar diferentes movimentos:
É altamente recomendado não codificar rigidamente esses movimentos; existe uma maneira muito melhor descrita abaixo, que permite um movimento verdadeiramente holonômico e é muito mais elegante.
Derivando a equação de movimento da Mecanum
Antes de pensar em um sistema Mecanum, imagine um cenário em que você possui um sistema de tração tipo tanque com 2 motores, que deseja controlar usando o eixo Y do analógico esquerdo para movimentos para frente/trás e o eixo X do analógico direito para giros pivotantes. Os motores estão configurados de modo que o movimento positivo seja no sentido horário para o motor direito, quando o corpo do robô está voltado para longe de você, e o motor esquerdo seja o oposto. Para controlar apenas o movimento para frente/trás, basta definir as potências dos motores com base no valor do eixo Y do analógico (invertendo o sinal, já que Y é reverso):
double y = -gamepad1.left_stick_y; // Remember, Y stick is reversed!
leftMotor.setPower(y);
rightMotor.setPower(y);