
Pré-configuração
A configuração é uma das etapas mais comumente mal compreendidas ou esquecidas necessárias para programar um robô. Esta seção tem o objetivo de explicar a importância da configuração e dissipar equívocos comuns sobre ela, respondendo às seguintes perguntas:
- O que é configuração?
- Como você configura elementos de hardware?
- Quais são os problemas comuns causados por um problema com o arquivo de configuração?
A importância da configuração
Embora cada REV Control Hub seja o mesmo, os robôs controlados pelo Control Hub não são. Cada Control Hub tem o mesmo número de portas de motor, portas de servo, portas digitais, e assim por diante, mas como cada usuário utiliza essas portas varia de sistema para sistema. Por exemplo, um Sensor de Cor V3 pode ser conectado à I2C Bus 1 no Hub de um usuário, mas outro usuário pode usar o mesmo barramento para conectar um Sensor de Distância de 2m.
O Control Hub sabe que há um dispositivo I2C conectado à porta, mas não possui naturalmente as informações necessárias para traduzir essas informações para um Op Mode ou informar ao Op Mode quais drivers precisam ser acessados para usar esse sensor. O usuário precisa fornecer informações adicionais, para que o software interno no Hub possa pegar informações do Op Mode e aplicá-las a uma porta de hardware externa correspondente e vice-versa. Esse processo é conhecido como mapeamento de hardware. O mapeamento de hardware é um processo de duas etapas que inclui: a criação de um arquivo legível conhecido como arquivo de configuração e chamadas ao mapeamento de hardware dentro de um Op Mode.
Arquivo de configuração
O arquivo de configuração é um arquivo legível criado pelo usuário por meio do aplicativo Driver Station. Ao criar um arquivo de configuração, os usuários são obrigados a atribuir cada dispositivo a uma porta, selecionar o tipo de dispositivo a partir das opções fornecidas pelo SDK e dar a ele um nome exclusivo.
Na programação, é importante distinguir entre variáveis, dando a cada variável um nome diferente.
- Assim que um arquivo de configuração é salvo ou ativado, o robô será reiniciado. Esse reinício é feito para que o SDK possa ler o arquivo, determinar quais dispositivos estão presentes e adicionar os dispositivos à classe hardwareMap.
Mapeamento de hardware
No lado do usuário, no modo de operação criado, está a classe hardwareMap. Esta classe é onde as informações criadas na configuração estão disponíveis para uso no código Blocks, OnBot Java ou Android Studio.
O nível de acesso ou interação que um usuário tem com a classe hardwareMap depende da ferramenta de programação que estão usando. Como o Blocks é uma coleção de trechos de código predefinidos, ele cria referências ao hardwareMap sempre que um trecho de código de variável, correspondente a um hardware externo, é referenciado pela primeira vez. No entanto, com OnBot Java e Android Studio, a referência ao hardwareMap requer a criação de uma variável atribuída a uma unidade de hardware externa dentro do hardwareMap.
As informações sobre como fazer referência à classe hardwareMap em Java serão explicadas com mais detalhes na seção Banco de dados - OnBot Java.
Configurando dispositivos de hardware comum
Acessando o utilitário de configuração
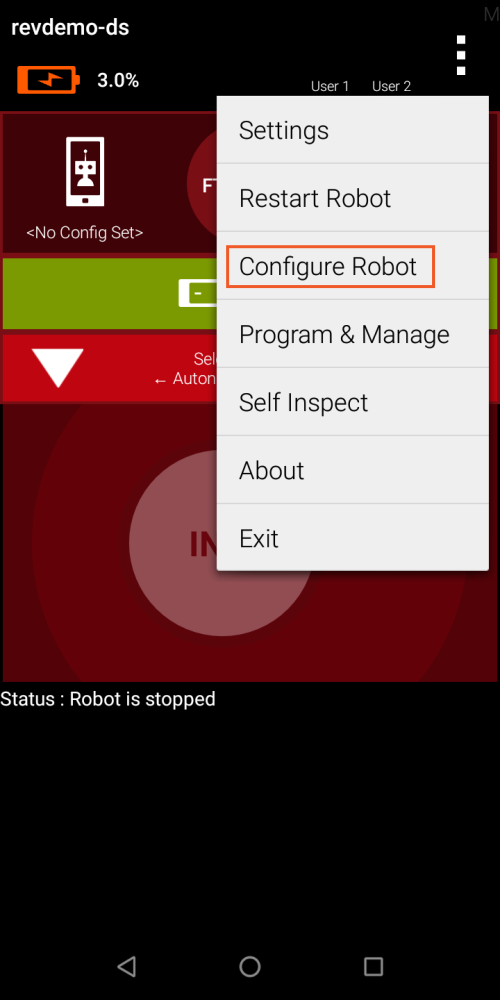
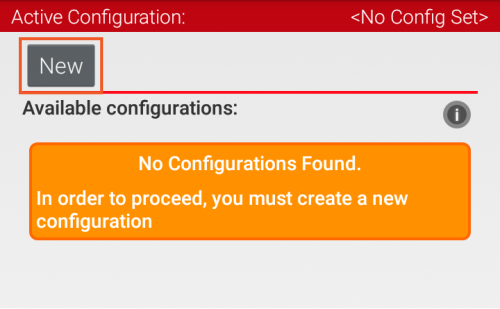
Na página de configurações disponíveis, selecione "New" (Novo).
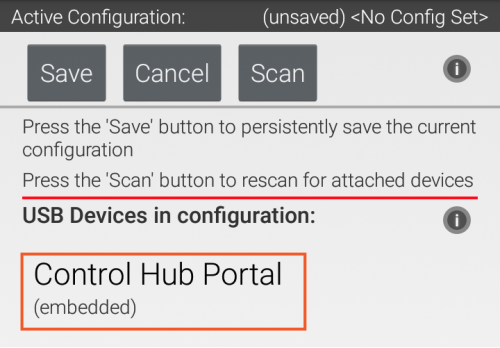
Na página de configuração de dispositivos USB, selecione "Control Hub Portal" (Portal do Control Hub).
Observação: Se você tiver um Expansion Hub, ele aparecerá como "Expansion Hub Portal" (Portal do Expansion Hub).
Dentro do Portal do Hub, selecione o dispositivo que deseja configurar. Neste caso, selecione o Control Hub.
Observação: se você tiver um Expansion Hub conectado a um Control Hub, o Expansion Hub também aparecerá como um dispositivo configurável no portal.
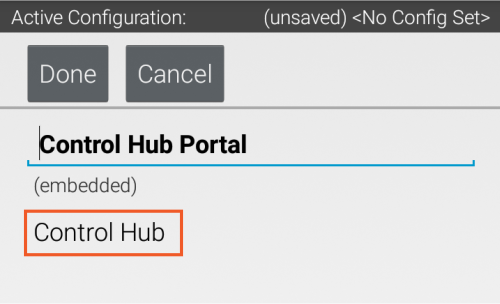
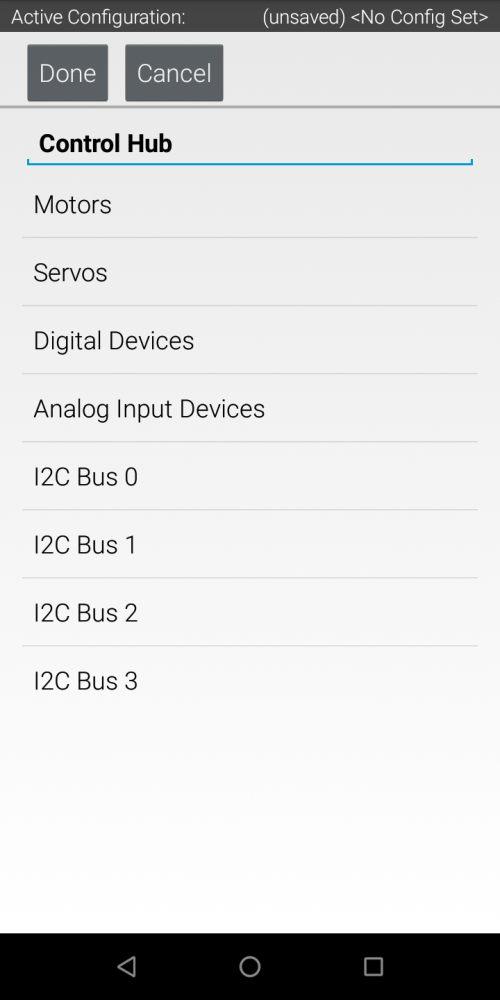
Isso o levará para a página mostrada na imagem. A partir daqui, você pode configurar motores, servos e sensores que está usando. Siga o restante do guia para descobrir como configurar dispositivos que serão usados na seção de Teste.
Observação: A forma como os dispositivos Digitais e Analógicos são configurados difere significativamente da forma como os dispositivos I2C são configurados. Isso ocorre porque cada porta física I2C é um barramento diferente que pode hospedar vários sensores diferentes. Para obter mais informações sobre os diferentes tipos de sensores, consulte a seção de sensores.
Configurando o hardware
A próxima seção mostrará como configurar componentes que serão usados no Test Bed. O tipo de hardware e os nomes foram escolhidos levando em consideração o plano de aula Hello World. Os usuários devem observar as notas dentro das etapas para considerar ao criar arquivos de configuração para outras instâncias.
Erros comuns no mapeamento de hardware
Dentro do mundo da programação e do software, os erros podem se apresentar em muitas formas e tipos diferentes. Ao mapear hardware, há dois erros principais que você pode encontrar. Ambos os erros se enquadram em categorias comuns de erros de software:
Erros de Interface - são erros entre como uma interface deveria funcionar e como ela realmente se comporta.
Erros em Tempo de Execução - são erros que ocorrem quando um programa está sendo executado.
Erro de interface
Os erros de interface ocorrem no SDK quando os parâmetros da interface do SDK não são atendidos. No processo de mapeamento de hardware, o erro de interface mais comum ocorre com a ferramenta de programação Blocks. Como mencionado na seção de Introdução à Programação, o Blocks oculta as complexidades da biblioteca do SDK dos usuários. Uma maneira de fazer isso é criando automaticamente referências ao hardwareMap quando trechos de código para uma unidade de hardware externo são usados.
Para automatizar as chamadas ao hardwareMap, a interface Blocks lê o arquivo de configuração e cria variáveis de hardware com base nas informações encontradas. Por esse motivo, é importante criar um arquivo de configuração antes de tentar codificar.
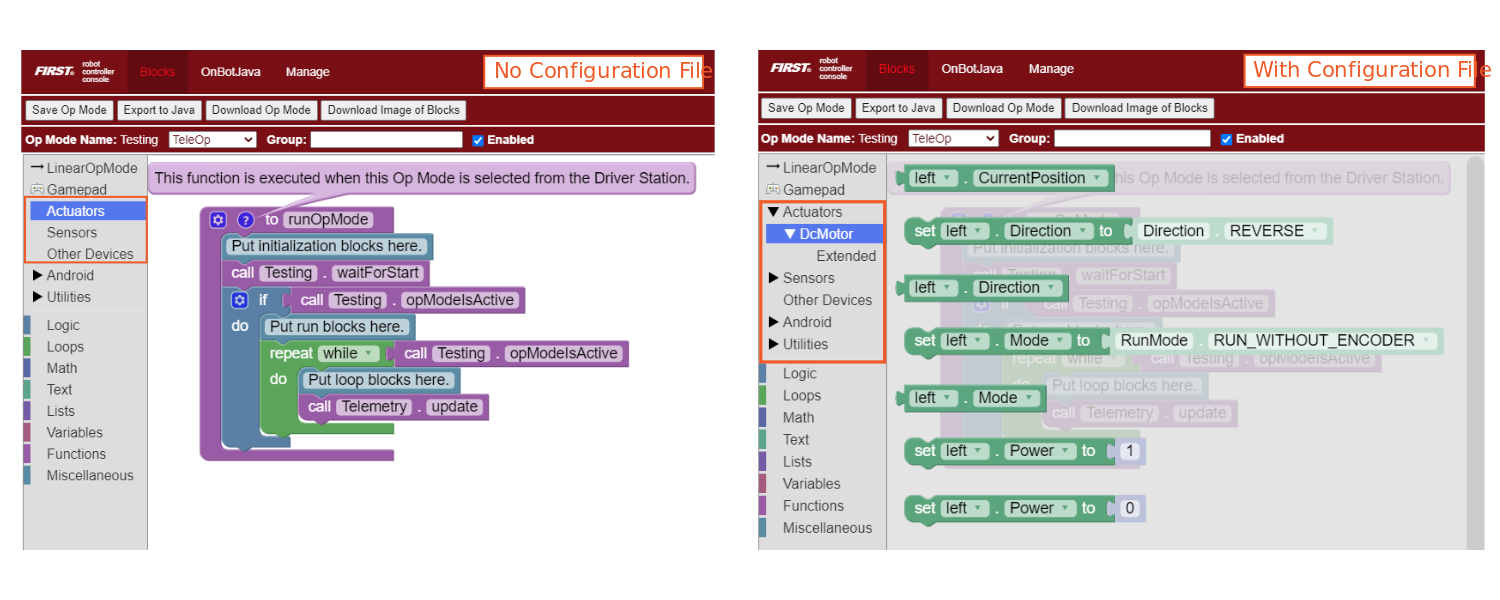
A imagem abaixo mostra duas versões diferentes da interface Blocks. Na versão sem arquivo de configuração, não há menus suspensos para acessar trechos de código específicos para atuadores ou sensores. Na versão da interface com um arquivo de configuração, os menus suspensos estão presentes e os trechos de código específicos para motores estão acessíveis.
Erros de tempo de execução
Dentro do SDK, erros em tempo de execução ocorrem durante a inicialização ou execução. Um dos erros em tempo de execução mais comuns dentro do REV Control System é exemplificado na imagem abaixo.
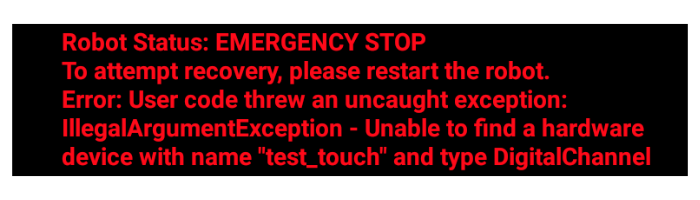
Esse erro indica uma inconsistência entre como um dispositivo de hardware é chamado no código e como isso se compara ao nome usado no arquivo de configuração. Existem duas maneiras diferentes de ocorrer esse erro.
A primeira ocorrência desse erro é quando não há um arquivo de configuração encontrado. Isso pode significar que um arquivo de configuração não foi criado, um arquivo foi criado, mas não está ativo, ou o arquivo errado está sendo usado. Quando qualquer uma dessas situações acontece, o código está solicitando um nome e tipo de dispositivo que o hardware map não consegue localizar no arquivo de configuração. O programa para no primeiro nome de dispositivo que não consegue localizar.
Uma referência incorreta ao hardwareMap também pode causar esse erro. Ao contrário do Blocks, OnBot Java e Android Studio exigem que um programador codifique manualmente a chamada ao hardwareMap. Se o nome de referência na chamada não corresponder ao nome do dispositivo no arquivo de configuração (é sensível a maiúsculas e minúsculas), o código será compilado sem falhas, mas o erro em tempo de execução ocorrerá. Vamos usar o arquivo de configuração da seção anterior como exemplo, onde há um sensor de toque chamado "test_touch" e um motor chamado "test_motor".
As aspas indicam que "test_touch" e "test_motor" representam uma variável de string que corresponde aos nomes dos dispositivos na configuração.
public class HR_test extends LinearOpMode{
private DigitalChannel test_touch;
private DcMotor test_motor;
@Override
public void runOpMode(){
//get the touch sensor and motor from hardwareMap
test_touch = hardwareMap.get(DigitalChannel.class, "test_touch");
test_motor = hardwareMap.get(DcMotor.class, "test_moto");
}
}
Observe no exemplo de linhas de código que o hardwareMap.get() para "test_motor" está escrito como "test_moto" em vez de "test_motor". Quando o código está sendo compilado, não há uma verificação imediata de que o nome solicitado está no hardwareMap. Essa verificação é feita quando o código é executado no robô. Quando a comunicação com o hardwareMap é iniciada, ele procura por "test_moto" e, quando não consegue encontrar, cria o erro em tempo de execução mencionado acima.