Controle do robô
Compreendidos os princípios básicos de controle de atuadores e obtenção de feedback de sensores a partir do Olá Robô - Test Bed, é hora de começar a configurar e programar nosso robô para controle Teleoperado e Autônomo!
| Seção | Objetivos da seção |
|---|---|
| Criando um robô básico | Apresenta um potencial robô para trabalhar, assim como o arquivo de configuração utilizado nas seções seguintes. |
| Noções básicas de transmissão | Diferenças entre drivetrains diferencial e omnidirecional e seu impacto nos tipos de controle teleoperado. |
Antes de continuar, é recomendado completar, no mínimo, um drivetrain. Existem algumas opções diferentes dependendo do kit que está sendo utilizado. Para este guia, o Class Bot V2 é utilizado. Consulte o guia de montagem para obter instruções completas de montagem para o Class Bot V2!
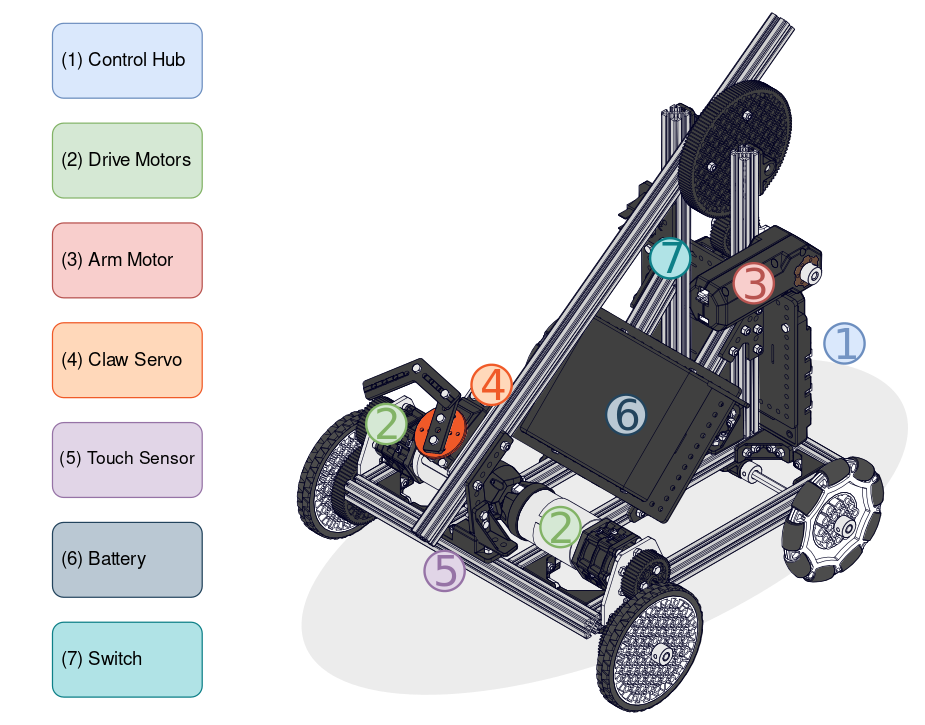
Criar um robô básico
A imagem abaixo destaca os principais componentes de hardware do Class Bot V2. Esses componentes são importantes para entender o processo de configuração.