
NetworkTables API completa
Dados básicos de segmento
Use os seguintes códigos:
Java
NetworkTableInstance.getDefault().getTable("limelight").getEntry("<variablename>").getDouble(0);
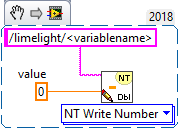
LABView

Para retornar os dados:
| Parâmetro | Descrição |
|---|---|
| tv | Se tem algum alvo válido (0 ou 1) |
| tx | Deslocamento horizontal do ponto alvo (LL1: -27° a 27°/ LL2: -29,8° até 29,8°) |
| ty | Deslocamento vertical do ponto alvo (LL1: -20,5° a 20,5° / LL2: -24,85° a 24,85°) |
| ta | Área Alvo (0% de imagem a 100%) |
| tl | A latência da pipeline (ms). Adicione a cl para conseguir a latência total |
| cl | Captura a latência da pipeline (ms). Tempo entre o final da exposição da linha intermediária do sensor até o começo do pipeline de rastreamento |
| tshort | Comprimento lateral do lado mais curto da caixa de detecção (pixels) |
| tlong | Comprimento lateral do maior lado da caixa de detecção (pixels) |
| thor | Comprimento horizontal da caixa de detecção (0 - 320 pixels) |
| tvert | Comprimento vertical da caixa de detecção (0 - 320 pixels) |
| getpipe | Ìndice de pipeline ativo (0...9) |
| json | JSON completo dos alvos de segmentação |
| tclass | ID de classe do detector neural primário ou do classificador neural |
| tc | Obtenha a cor HSV média abaixo da região da mira como um NumberArray |
AprilTag e dados 3D
Use os seguintes códigos:
Java
NetworkTableInstance.getDefault().getTable("limelight").getEntry("<variablename>").getDoubleArray(new double[6]);
C++
nt::NetworkTableInstance::GetDefault().GetTable("limelight")->GetNumberArray("<variablename>",std::vector<double>(6));
Para retornar esse dado:
| Parâmetro | Descrição |
|---|---|
| botpose | Transformação do robô no espaço do campo. Translação (X, Y, Z), Rotação (Roll, Pitch, Yaw), latência total (cl+tl) |
| botpose_wpiblue | Transformação do robô no espaço do campo (origem na Driver Station azul). Translação (X, Y, Z), Rotação (Roll, Pitch, Yaw), latência total (cl_tl) |
| botpose_wpired | Transformação do robô no espaço do campo (origem na Driver Station red). Translação (X, Y, Z), Rotação (Roll, Pitch, Yaw), latência total (cl_tl) |
| camerapose_targetspace | Transformação 3D da câmera no sistema de coordenadas da AprilTag em vista (array (6)) |
| targetpose_cameraspace | Transformação 3D da AprilTag em vista no sistema de coordenadas da câmera |
| targetpose_robotspace | Transformação 3D da AprilTag em vista no sistema de coordenadas do robô |
| camerapose_robotspace | Transofmração 3D da câmera no sistema de coordenadas do robô |
| tid | ID da AprilTag em vista |
Controle de câmera
Use os seguintes códigos:
Java
NetworkTableInstance.getDefault().getTable("limelight").getEntry("<variablename>").setNumber(<value>);
LABView
C++
nt::NetworkTableInstance::GetDefault().GetTable("limelight")->PutNumber("<variablename>",<value>);
Python
NetworkTables.getTable("limelight").putNumber('<variablename>',<value>)
Para definir esse dado:
| Modo do LED | Definir o estado do LED |
|---|---|
| [0] | Usa o modo do LED na pipeline atual |
| [1] | Desligado |
| [2] | Piscando |
| [3] | Ligado |
| Modo da câmera | Define o modo de operação |
|---|---|
| 0 | Processador de visão |
| 1 | Câmera de Driver (Desabilita o processamento) |
| Pipeline | Define a pipeline atual |
|---|---|
| 0..9 | Define a pipeline 0...9 |
| Stream | Define o modo de gravação da LimeLight |
|---|---|
| 0 | Padrão - Transmissão simultânea se tiver uma webcam conectada oa robô |
| 1 | PiP Principal - A transmissão da câmera secundária é colocada no canto inferior direito ao da principal |
| 2 | PiP secundário - A transmissão da câmera principal é colocada no canto inferior direito ao da secundária |
| Foto | Permite aos usuários tirar fotos durante a partida |
|---|---|
| 0 | Reseta o modo de foto |
| 1 | Tira uma foto |
| Recorte | (Matriz) Define o recorte retângular. A pipeline deve utilizar o corte padrão da interface web. A matriz deve ter 4 entradas. |
|---|---|
| [0] | X0 - Mín ou Máx valor de X do recorte retângular (-1 a 1) |
| [1] | X1 - Mín ou Máx valor de X do recorte retângular (-1 a 1) |
| [2] | Y0 - Mín ou Máx valor de Y do recorte retângular (-1 a 1) |
| [3] | Y1 - Mín ou Máx valor de Y do recorte retângular (-1 a 1) |
camerapose_robotspace_set | (Matriz) Define a posição da câmera no sistema de coordenadas do robô
Java
double[] cropValues = new double[4];
cropValues[0] = -1.0;
cropValues[1] = 1.0;
cropValues[2] = -1.0;
cropValues[3] = 1.0;
NetworkTableInstance.getDefault().getTable("limelight").getEntry("crop").setDoubleArray(cropValues);
C++
wip