Visão geral
Noções básicas de motor
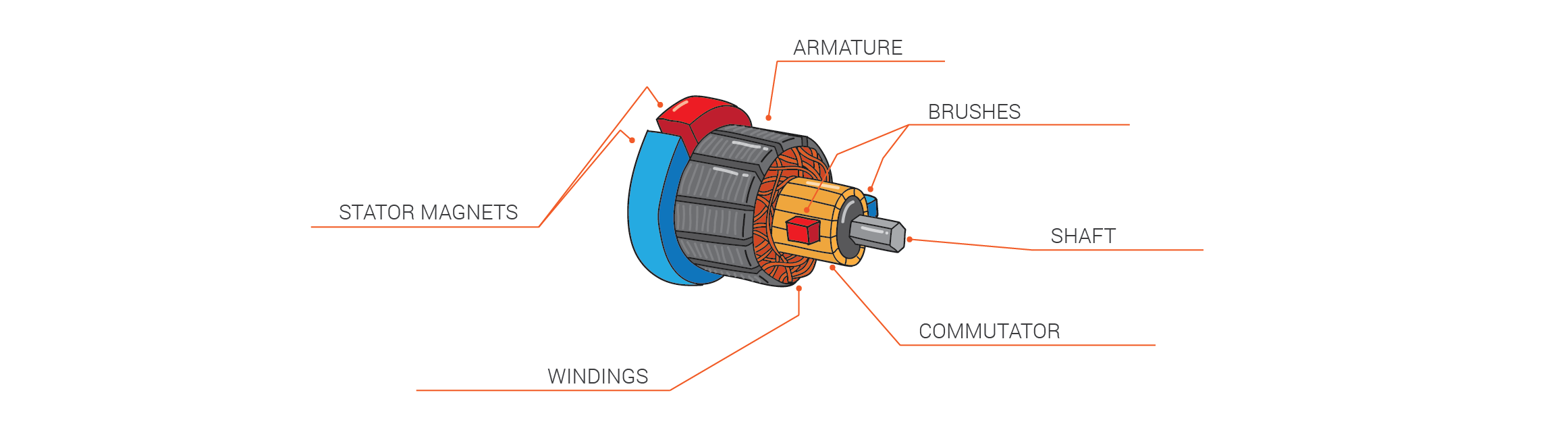
Motores elétricos são o núcleo da usina de energia da maioria dos robôs. Existem dois tipos de motores no Sistema de Construção REV DUO: o Motor Core Hex (REV-41-1300) e o Motor HD Hex (REV-41-1301). Ambos os motores são motores CC com escova. A imagem abaixo destaca os elementos comuns de um motor CC com escova.
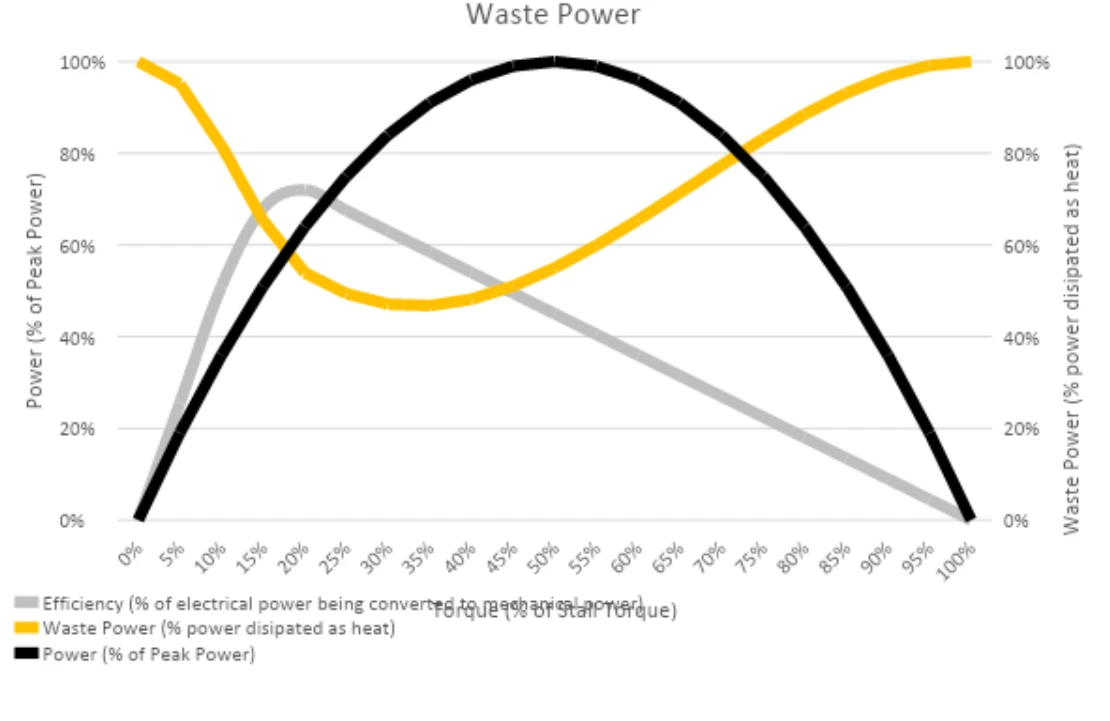
Motores CC com escova sem uma caixa de redução podem ser estimados como ~80% eficientes, o que significa que se um motor estiver consumindo 60 watts de energia, cerca de ~48 watts serão convertidos em energia mecânica e ~12 watts se transformarão em calor. Uma vez que uma caixa de redução é adicionada, a eficiência geral do sistema diminui.
Parâmetros
Motores DC escovados podem ser descritos com alguns parâmetros:
Torque de parada
O Torque de Bloqueio é medido quando a RPM do motor é zero e o motor está consumindo sua corrente máxima de bloqueio. Este valor é o torque máximo que o motor é capaz de produzir. Tenha em mente que o motor não é capaz de produzir esse torque por um período indefinido de tempo. Energia desperdiçada será liberada no motor na forma de calor. Quando o motor está gerando mais calor desperdiçado do que o corpo do motor é capaz de dissipar, o motor eventualmente superaquecerá e falhará.
Corrente de parada
A Corrente de Bloqueio é a quantidade máxima de corrente que o motor irá consumir. A corrente de bloqueio é medida no ponto em que o motor tem torque suficiente para fazer com que a RPM diminua para zero. Este é também o ponto em que a maior quantidade de calor desperdiçado será dissipada no corpo do motor.
Velocidade livre
A Velocidade Livre é a velocidade angular que um motor atingirá quando alimentado com a Tensão de Operação e sem carga no eixo de saída do motor. Essa RPM é a velocidade angular mais rápida que o motor alcançará. Quando o motor está sob carga, sua velocidade angular diminuirá.
Aprenda mais sobre velocidade angular na seção de Noções básicas.
Tensão operacional
A Tensão de Operação é a voltagem esperada que o motor experimentará durante a operação. Se um robô for construído usando uma bateria de 12 volts, a Tensão de Operação do motor será de 12 volts. Ao controlar a RPM do motor, o controlador de velocidade CC irá modular a voltagem efetiva percebida pelo motor. Quanto menor a voltagem percebida pelo motor, mais devagar ele girará. Motores CC têm uma voltagem máxima classificada e se essa voltagem for ultrapassada, o motor falhará prematuramente.
Os parâmetros definidos acima estão inter-relacionadas. Reserve um tempo para se familiarizar com as definições e como elas se conectam entre si.
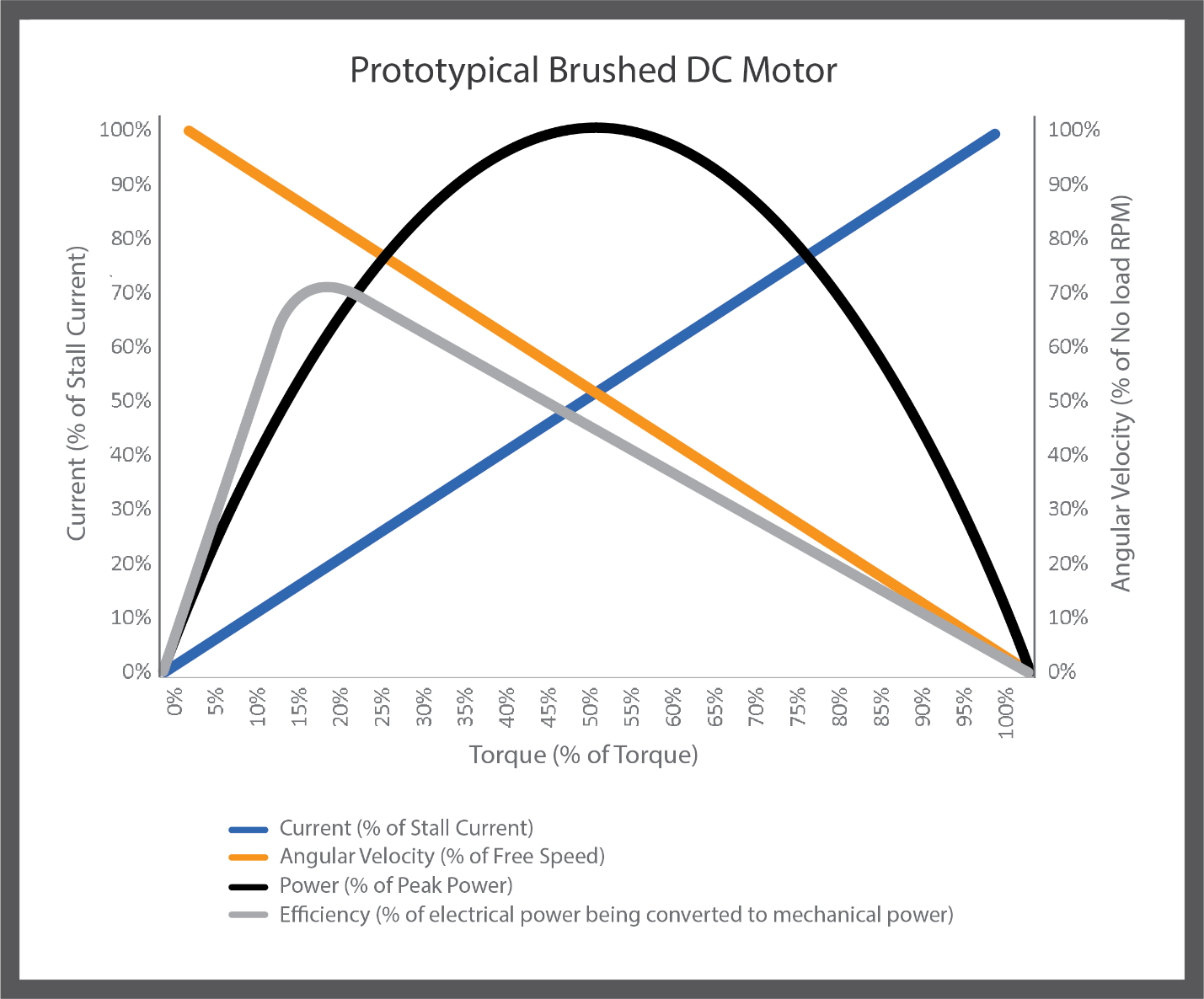
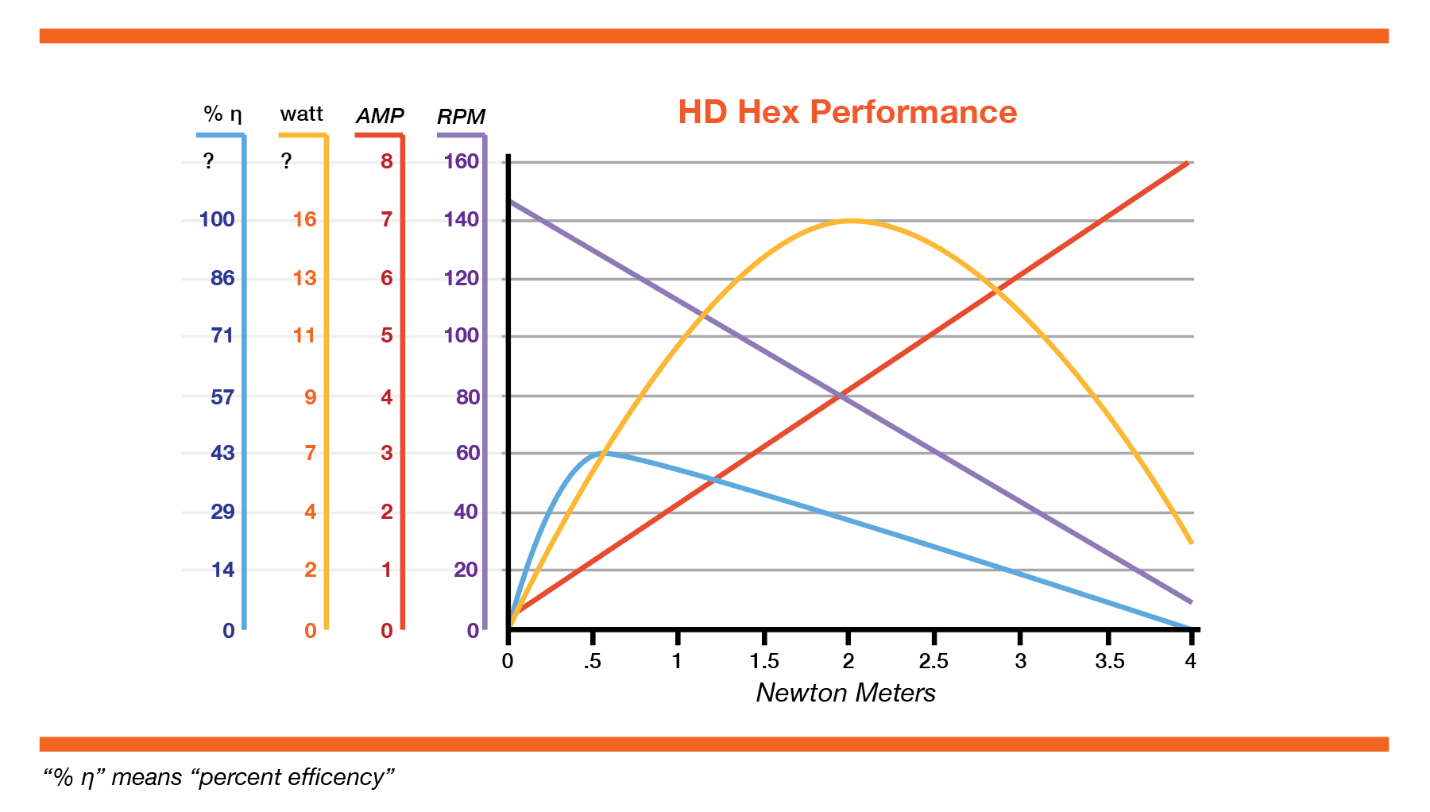
O gráfico de desempenho prototípico de um motor CC escovado pode ser usado para estimar o desempenho de um motor. Na maioria dos casos, a corrente, medida em Ampères, é o valor mais fácil de encontrar, pois pode ser relatada pelo Hub de Controle REV (REV-31-1595) e pelo Hub de Expansão (REV-31-1153).
Prevenindo falha do motor prematura
Para garantir que um motor elétrico dure o máximo possível, é importante ter em mente algumas diretrizes:
-
Carga Suave: Torque elevado repentino ou mudanças bruscas de direção podem causar desgaste e falha prematura nos componentes da caixa de engrenagens. Isso só se torna um problema quando o pico de torque excede o torque de bloqueio classificado do motor. Quando a carga de choque é necessária, é melhor utilizar frenagem mecânica ou uma parada abrupta que absorva o impacto em vez de depender do motor.
-
Superaquecimento: Quando um motor é carregado próximo ao seu torque operacional máximo, ele gera mais calor residual do que quando opera em um torque operacional mais baixo. Se esse calor for permitido acumular, o motor pode desgastar prematuramente ou falhar espontaneamente.
O motor Core Hex pode funcionar continuamente por aproximadamente 4 horas antes de superaquecer em carga próxima ao torque máximo.
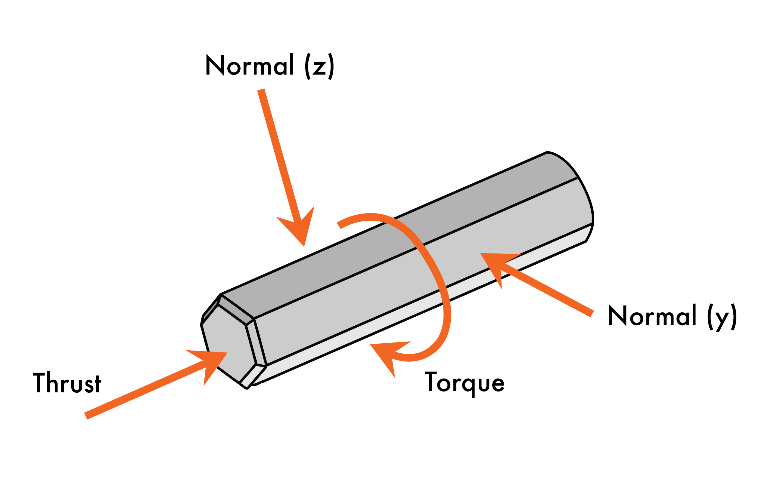
- Eixo de saída mal suportado, a maioria dos eixos de saída do motor não são projetados para suportar grandes forças de impulso ou forças normais ao eixo. Rolamentos precisam ser utilizados para apoiar o eixo quando são esperadas cargas nessas direções.
Para aprender mais sobre como apoiar adequadamente o movimento, visite a página sobre suporte ao movimento da REV Robotics.
Especificações dos motores da REV
Os motores REV DUO Robotics estão disponíveis em dois tipos: HD Hex Motors e Core Hex Motors. Todos os motores REV DUO têm um eixo hexagonal ou acoplador hexagonal fêmea como saída de sua caixa de engrenagens. O eixo hexagonal é extremamente confiável na transmissão de torque, sem depender de parafusos de fixação que podem soltar-se ou não ser apertados adequadamente. Os motores REV DUO também incluem conectores de bloqueio com chaveta tanto para a alimentação do motor quanto para o codificador embutido.
Para mais informações sobre o encoder veja outro livro em nossa documentação
| Motores | Torque de parada | Velocidade Livre | Tensão nominal | Corrente de parada | Máxima potência de saída |
|---|---|---|---|---|---|
| HD HEX | 0,105 N.m | 6000 RPM | 12V | 8.5 Amps | 15W |
| HD HEX 40:1 | 4,2 N.m | 150 RPM | 12V | 8.5 Amps | 15W |
| HD HEX 20:1 | 2,1 N.m | 300 RPM | 12V | 8.5 Amps | 15W |
| HD HEX 20:1 planetária | 2,1 N.m | 300 RPM | 12V | 8.5 Amps | 15W |
| Core Hex 72:1 | 3,2 N.m | 125 RPM | 12V | 4.4 Amps | 8W |