
NEO e outros motores 500
Siga estas instruções se estiver usando um motor Neo Brushless V1.1, Flacon 500, Kraken ou CIM. Use as informações abaixo para determinar o acoplador de entrada MAXPlanetary correto para o seu motor.
- Motores NEO Brushless V1.1, CIM ou outros com eixo de saída de 8 mm - Kit de Acoplador de Entrada com Chaveta de 8 mm MAXPlanetary (REV-21-2108)
- Motores Falcon 500 ou outros com eixo de saída de 14 dentes - Acoplador de Entrada com Encaixe Estriado de 14 Dentes MAXPlanetary (REV-21-2124)
- Motores Kraken ou outros com eixo de saída de 15 dentes - Acoplador de Entrada com Encaixe Estriado de 15 Dentes MAXPlanetary (REV-21-2138)
Instruções de montagem NEO com vários estágios
Para a montagem, você precisará de uma chave Allen de 5/32".
| 1) Coloque o estágio de entrada universal no motor. | 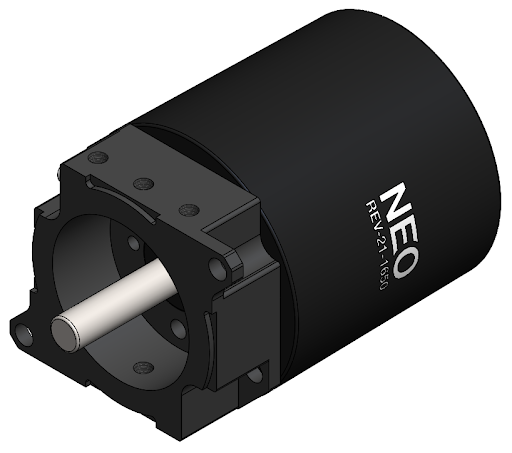 |
| 2) Alinhe dois dos furos do motor com os furos do estágio de entrada. |  |
| 3) Insira os parafusos de cabeça sextavada interna 10-32 de 1/2 polegada nos furos do motor e aperte-os. Observação: É recomendável rosquear ambos os parafusos completamente nos furos sem apertá-los totalmente e, em seguida, alternar o aperto entre os dois parafusos até que estejam firmes. |  |
| 4) Insira a chaveta de 2 mm na ranhura da chaveta do eixo do motor. Nota: A chaveta deve ser posicionada o mais próximo possível do motor, dentro dos limites da ranhura. |  |
| 5) Alinhe o acoplador correto para o eixo do motor que você está montando. | 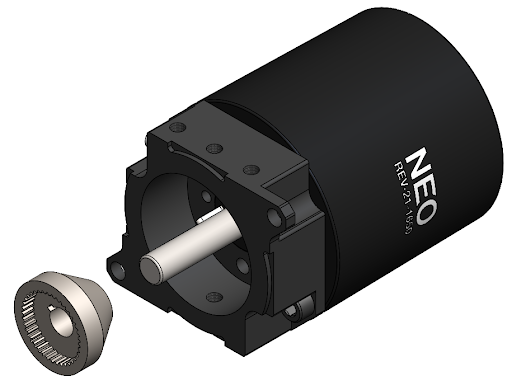 |
| 6) Deslize o acoplador de entrada no eixo do motor. Certifique-se de que a chave esteja engatada e que o acoplador de entrada esteja totalmente encaixado contra o motor. | 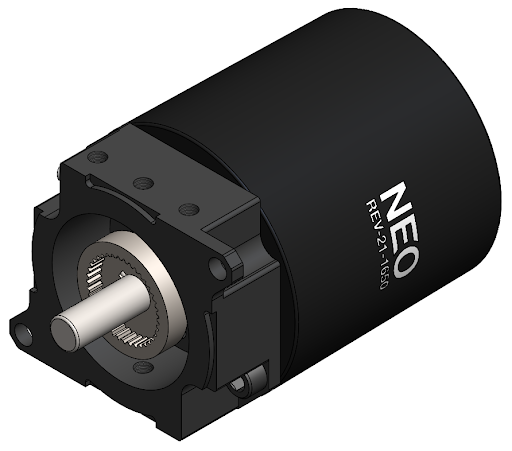 |
Se o seu robô exigir retenção do eixo na caixa de engrenagens, siga as instruções de montagem da retenção do eixo agora mesmo, antes de prosseguir.
Ao construir sua caixa de redução, certifique-se de que a engrenagem com a maior redução esteja mais próxima do motor.