
IMU
IMU é um dispositivo, portanto, um conjunto de componentes que tem como intenção final indicar a posição/velocidade angular de um mecanismo. Seu nome pode ser traduzido como dispositivo de medição inercial.
Para utiliza-lo é necessário editar um arquivo da biblioteca do Arduino IDE.
Faça o seguinte caminho em seu computador:
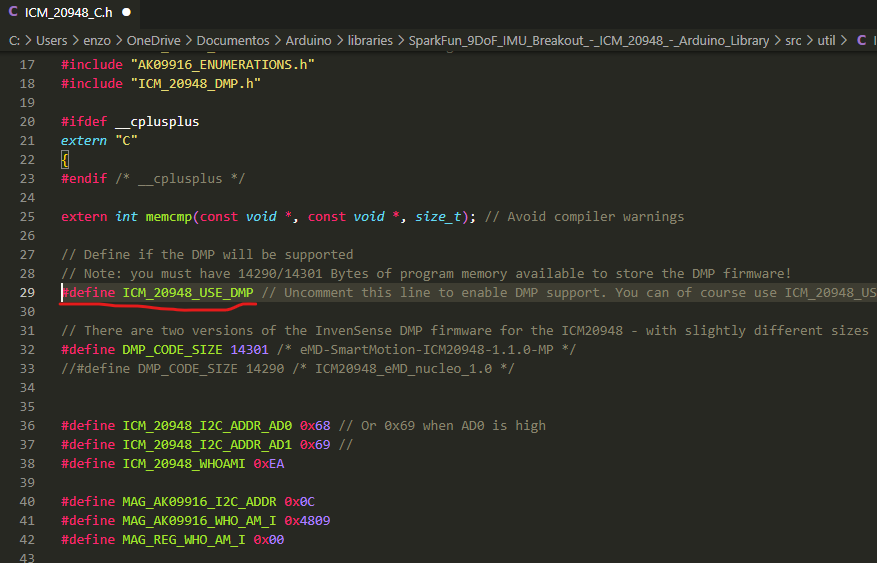
C:\Users\"User"\Documentos\Arduino\libraries\SparkFun_9DoF_IMU_Breakout_-ICM_20948-_Arduino_Library\src\util
Abra o arquivo ICM_20948_C.h, caso ele peça algum aplicativo para abrir, use o editor de texto do windows.
Por fim, descomente (remova os caracteres //) da seguinte linha.
Agora em nosso código podemos fazer o seguinte.
#include <Arara.h>
IMU imu;
void setup() {
// put your setup code here, to run once:
imu.init();
}
void loop() {
// put your main code here, to run repeatedly:
Serial.print("Pitch: ");
Serial.println(imu.getPitch());
Serial.print("Roll: ");
Serial.println(imu.getRoll());
Serial.print("Yaw: ");
Serial.println(imu.getYaw());
}