# 2. 5V
Este capítulo será usado para explicar as conexões elétricas do sensor infravermelho E18-d80NK.
# 2.1 Materiais necessários
___
Nesta página será passado um panorama de quais serão os materiais utilizados na conexão elétrica do sensor infravermelho. Estamos considerando que você já tenha um suporte com a elétrica inicial de todo robô montada, a qual inclui: roboRIO, módulos de distribuição, breaker de 120A, entre outros...
## **Lista de Materiais**
- 1 x Sensor infravermelho retroreflexivo - **E18-d80NK**

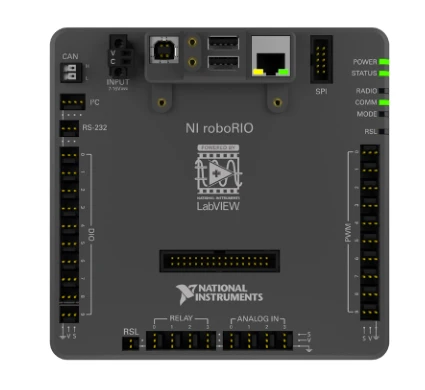
- 1 x RoboRIO - **Estamos considerando que ele já está conectado eletricamente ao resto do robô**
- Serão utilizados alguns cabos de 24 AWG (Cabos jumper)
# 2.2 Conexão elétrica
Nesta página será mostrado como deverá ser realizada a conexão elétrica do sensor IR.
## **Diagramas**
Antes de mais nada é importante esclarecermos o que cada cor de cabo indica. Então:
- Marrom - **Vcc+**
- Preto - **Output**
- Azul - **GND**
___
>A vantagem deste sensor é que é possível conecta-lo diretamente ao roboRIO sem optoacopladores ou outros componentes.
# 2.3 Calibração do sensor
Nessa página será mostrado quais ajustes são possíveis fazer no sensor para melhorar sua precisão na hora de lermos um objeto.
___
## **Distância**
Com este sensor é possível ajustarmos a distância útil que queremos que ele leia, dessa forma, podemos regula-lo de acordo com nosso mecanismo para maior compatibilidade. Para calibrarmos a distância útil de leitura primeira é preciso notar o seguinte:

A parte de trás do sensor possui um parafuso, caso esse seja rotacionado no sentido **horário** a distância útil do sensor aumenta, agora, se o girarmos para o sentido **anti-horário** a distância de detecção diminui.
>Interessante notar que o sensor possui um LED acoplado, dessa forma ele liga quando indicar *true* e desliga quando indicar *false*.