roboRIO
Introdução ao roboRIO

O roboRIO é projetado especificamente com a FIRST em mente. O roboRIO tem uma arquitetura básica de processadores de tempo real + FPGA (field programmable gate array), porém mais poderoso, leve e menor do que alguns sistemas semelhantes usados na indústria.
O roboRIO é um controlador de robótica reconfigurável que inclui portas embutidas para circuitos integrados interconectados (I2C), interfaces seriais (SPI), RS232, USB, Ethernet, modulação de largura de pulso (PWM) e relés para conectar rapidamente os sensores e atuadores comuns usados em robótica. O controlador possui LEDs, botões, um acelerômetro embutido e uma porta de eletrônicos personalizados. Ele tem um processador dual-core ARM de tempo real Cortex-A9 a bordo e um FPGA Xilinx personalizável.
Informações detalhadas sobre o roboRIO podem ser encontradas no Manual do Usuário do roboRIO e nas especificações técnicas do roboRIO.
Antes de implantar programas no seu roboRIO, você deve primeiro criar a imagem do roboRIO:
Criando Imagem
Criando a Imagem do roboRIO 1
Antes de criar a imagem do seu roboRIO, você deve ter concluído a instalação do FRC Game Tools. Você também deve ter a alimentação do roboRIO devidamente conectada ao Painel de Distribuição de Energia. Certifique-se de que os fios de alimentação do roboRIO estejam seguros e que o conector esteja firmemente preso ao roboRIO (4 parafusos no total para verificar).
As instruções para imagem do roboRIO 2.0 estão aqui
Configurando o roboRIO
A roboRIO Imaging Tool será utilizada para a configuração do roboRIO
Conexão USB
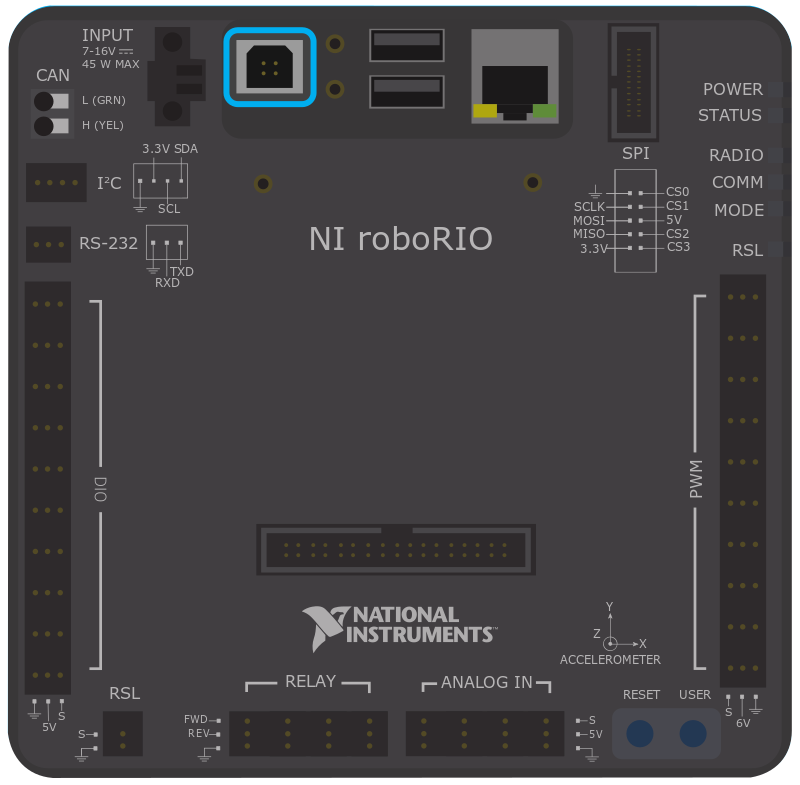
Conecte um cabo USB da porta USB Device do roboRIO ao PC. Isso requer um cabo USB Tipo A macho (extremidade padrão do PC) para Tipo B macho (quadrado com 2 cantos cortados), mais comumente encontrado como um cabo USB de impressora.
O roboRIO deve ser apenas imageado via conexão USB. Não é recomendado tentar a imagem via conexão Ethernet.
Instalação do Driver
O driver do dispositivo deve instalar automaticamente. Se você ver um pop-up "Novo Dispositivo" no canto inferior direito da tela, aguarde a instalação do driver completar antes de continuar.
Executando a Ferramenta de Imagem

A ferramenta de imagem do roboRIO e a imagem mais recente são instaladas com o NI FRC® Game Tools. Lance a ferramenta de imagem clicando no atalho na Área de Trabalho. Se tiver dificuldades em imagear seu roboRIO, pode ser necessário clicar com o botão direito do mouse no ícone e selecionar Executar como Administrador.
A roboRIO Imaging Tool também está localizada no caminho: C:\Program Files (x86)\National Instruments\LabVIEW 2020\project\roboRIO Tool
roboRIO Imaging Tool
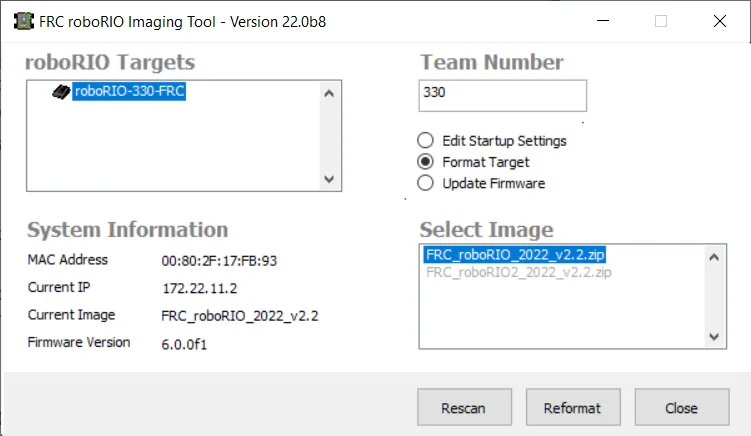
Após o lançamento, a Ferramenta de Imagem do roboRIO fará a varredura em busca de roboRIOs disponíveis e indicará os encontrados na caixa do lado esquerdo superior. A caixa do lado esquerdo inferior exibirá informações e configurações para o roboRIO atualmente selecionado. O painel do lado direito contém controles para modificar as configurações do roboRIO:
- Editar Configurações de Inicialização - Esta opção é usada quando você quer configurar as configurações de inicialização do roboRIO (as configurações no painel à direita), sem imagear o roboRIO.
- Formatar Alvo - Esta opção é usada quando você quer carregar uma nova imagem no roboRIO (ou reflash a imagem existente). Esta é a opção mais comum.
- Atualizar Firmware - Esta opção é usada para atualizar o firmware do roboRIO. Para esta temporada, a ferramenta de imagem exigirá que o firmware do roboRIO seja a versão 5.0 ou superior.
Atualizando firmware
O firmware do roboRIO deve ser pelo menos a versão 5.0 para trabalhar com a imagem de 2019 ou mais recente.
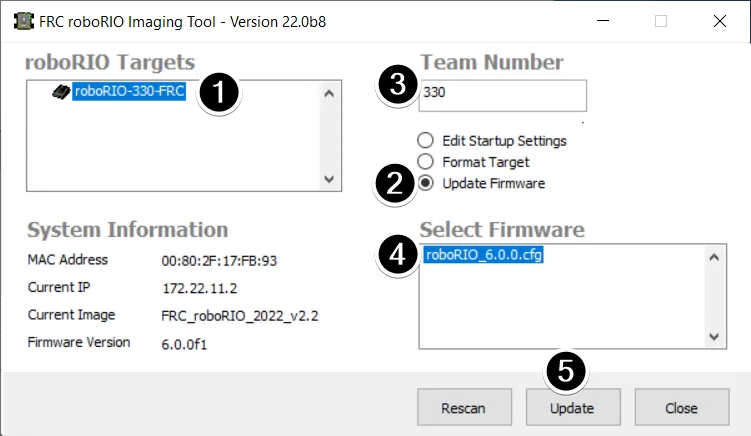
Para atualizar o firmware do roboRIO:
- Certifique-se de que seu roboRIO está selecionado no painel superior esquerdo.
- Selecione Atualizar Firmware no painel superior direito.
- Insira um número de equipe na caixa Número da Equipe.
- Selecione o arquivo de firmware mais recente no canto inferior direito.
- Clique no botão Atualizar.
Criando a imagem do roboRIO
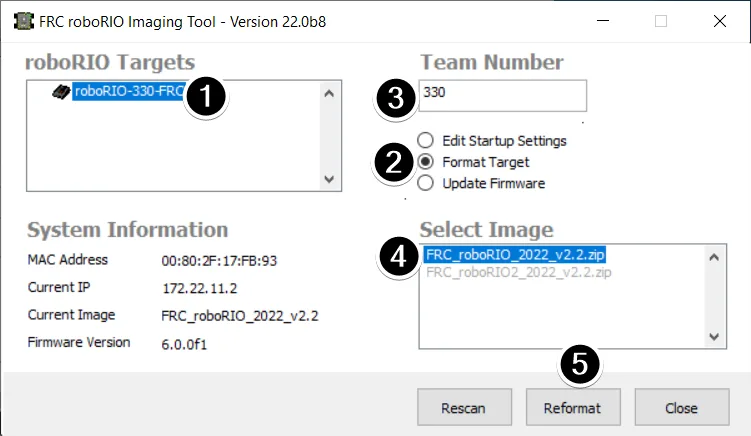
- Certifique-se de que o roboRIO está selecionado no painel esquerdo superior.
- Selecione Formatar Alvo no painel direito.
- Insira o número da sua equipe na caixa.
- Selecione a versão mais recente da imagem na caixa.
- Clique em Reformatar para iniciar o processo de imagem.
Processo de Imagem
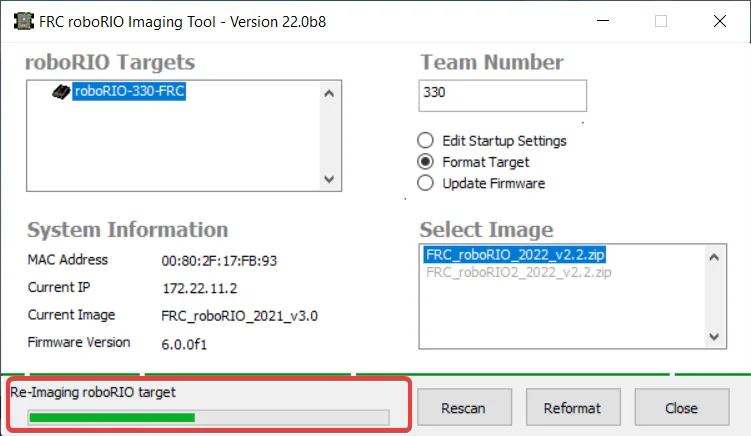
O processo de imagem vai demorar aproximadamente 3 - 10 minutos. Uma barra de progresso no canto inferior esquerdo vai indicar o estado do processo.
Imagem Completa
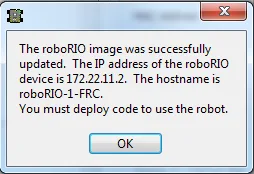
Quando a imagem estiver completa, você deverá ver o diálogo acima. Clique em Ok, depois clique no botão Fechar no canto inferior direito para fechar a ferramenta de imagem. Reinicie o roboRIO usando o botão de reset para que o novo número da equipe tenha efeito.
Solução de Problemas
Se você não conseguir fazer a imagem seu roboRIO, as etapas de solução de problemas incluem:
- Tente executar a Ferramenta de Imagem do roboRIO como Administrador clicando com o botão direito do mouse no ícone da Área de Trabalho para iniciá-la.
- Tente acessar a página web do roboRIO com um navegador em http://172.22.11.2/ e/ou verifique se o adaptador de rede NI aparece na sua lista de Adaptadores de Rede no Painel de Controle. Se não, tente reinstalar os Game Tools da NI FRC ou tente um PC diferente.
- Desative todos os outros adaptadores de rede.
- Certifique-se de que seu firewall está desativado.
- Algumas equipes tiveram um problema onde a imagem falha se o nome do dispositivo do computador que você está usando contém um traço (-) nele. Tente renomear o computador (ou usar um PC diferente).
- Tente iniciar o roboRIO no Modo de Segurança pressionando e segurando o botão de reset por pelo menos 5 segundos.
- Tente um cabo USB diferente.
- Tente um PC diferente.
Criando a Imagem do roboRIO 2
O NI roboRIO 2.0 inicializa a partir de um cartão microSD configurado com uma imagem de boot apropriada contendo o NI Linux Real-Time OS, drivers e bibliotecas específicas para FRC. O cartão microSD deve ser imageado com um laptop e um aplicativo que grava no SD conforme as instruções nesta página.
Fazer a imagem do roboRIO 2 diretamente com a roboRIO Imaging Tool não é suportado.
Requisitos do microSD
O NI roboRIO 2.0 suporta todos os cartões microSD. É recomendado usar um cartão com 2GB ou mais de capacidade.
Dicas de Operação
O NI roboRIO 2.0 requer um cartão microSD totalmente inserido contendo uma imagem válida para inicializar e operar conforme pretendido.
Se o cartão microSD for removido enquanto energizado, o roboRIO travará. Uma vez que o cartão microSD seja recolocado, o roboRIO precisará ser reiniciado usando o botão de reset ou dado um ciclo de energia.
Não ocorrerá dano algum pela remoção ou inserção do cartão microSD enquanto energizado, mas a melhor prática é realizar essas operações com o dispositivo desenergizado.
Antes de imagear seu roboRIO, você deve ter completado a instalação dos FRC Game Tools. Você também deve ter o roboRIO energizado corretamente ligado ao CTRE Power Distribution Panel ou REV Power Distribution Hub. Certifique-se de que os fios para o roboRIO estão seguros e que o conector está firmemente conectado ao roboRIO (4 verificações totais para checar).
Imageamento Direto para o Cartão microSD
A imagem será transferida para o cartão microSD usando uma ferramenta especializada de escrita, às vezes chamada de gravador. Várias utilidades estão listadas abaixo, mas a maioria das ferramentas que podem escrever imagens para o boot de um Raspberry Pi ou placas similares também produzirão um cartão SD inicializável para o roboRIO 2.0.
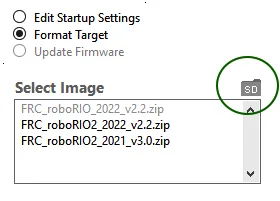
Os arquivos de imagem suportados são nomeados FRC_roboRIO2_YEAR_VERSION.img.zip. Você pode localizá-los clicando no botão SD na ferramenta de imagem do roboRIO e navegando até a pasta SD Images. É geralmente melhor usar a versão mais recente da imagem.
Se estiver usando um sistema operacional que não seja Windows, você precisará copiar este arquivo de imagem para aquele computador.
Imagens do Raspberry Pi não irão inicializar no roboRIO porque o sistema operacional e os drivers são incompatíveis. Da mesma forma, uma imagem do roboRIO não é compatível com controladores Raspberry Pi.
Escrevendo a imagem com balenaEtcher
- Baixe e instale o balenaEtcher.
- Execute o programa.
-
Flash from file-> localize o arquivo de imagem que você deseja copiar para o cartão microSD -
Select target-> selecione o dispositivo microSD destino
-
- Pressione
Flash
Escrevendo a imagem com Raspberry Pi Imager
- Baixe e instale o Raspberry Pi Imager.
- Execute o programa.
-
Choose OS->Use Custom-> selecione o arquivo de imagem que você deseja copiar para o cartão microSD -
Choose Storage-> selecione o dispositivo microSD destino
-
- Pressione
Write
Após escrever a imagem, o Windows pode solicitar para formatar o disco. Não formate, ou você precisará escrever a imagem novamente.
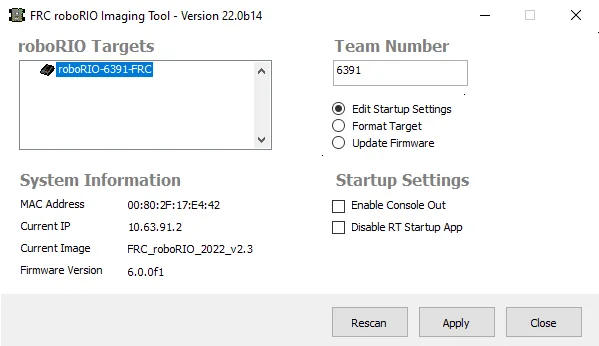
Configurando o Número da Equipe no roboRIO
O processo de escrita de imagem acima não define um número de equipe. Para corrigir isso, as equipes precisarão inserir o cartão microSD no roboRIO e conectar-se ao robô via um cabo USB tipo B. Com a roboRIO Imaging Tool, vá até Edit Startup Settings. Em seguida, preencha a caixa Team Number e clique em Apply.
roboRIO Web Dashboard
O painel web do roboRIO é uma página da web integrada ao roboRIO que pode ser usada para verificar o status e atualizar as configurações do roboRIO.
Os usuários podem encontrar problemas ao usar o IE (Internet Explorer) devido à compatibilidade. Navegadores alternativos como o Google Chrome ou Mozilla Firefox são recomendados para a melhor experiência.
Abrindo o WebDash
Para abrir o painel web, abra um navegador de internet e digite o endereço do roboRIO na barra de endereços (172.22.11.2 para USB, ou roboRIO-####-FRC.local onde #### é o número da sua equipe, sem zeros à esquerda, para qualquer interface).
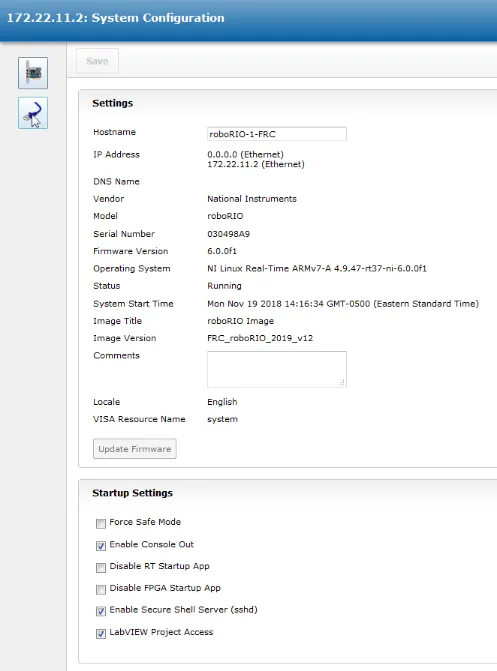
Aba de Configuração do Sistema
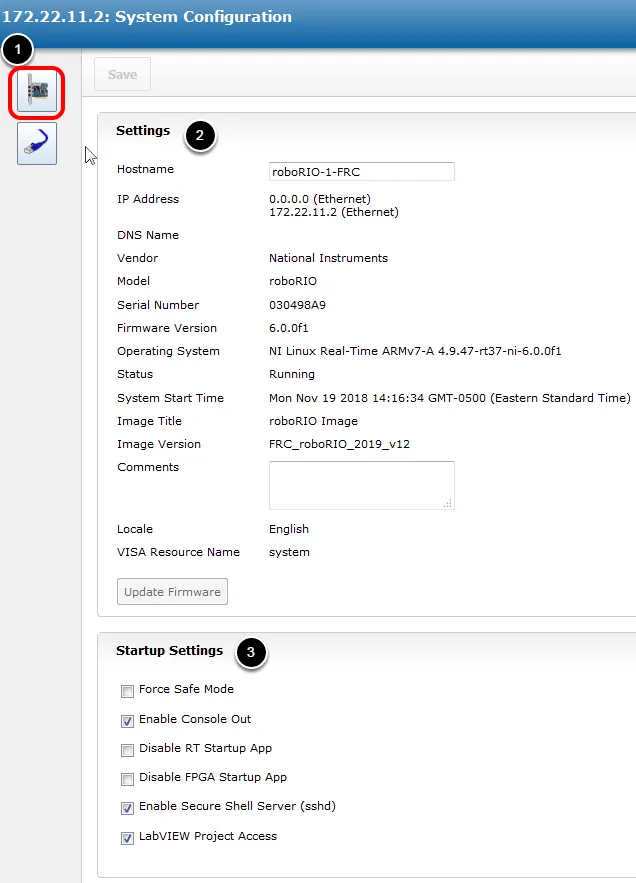
A tela inicial do painel web é a aba de Configuração do Sistema, que possui 5 seções principais:
Startup Settings
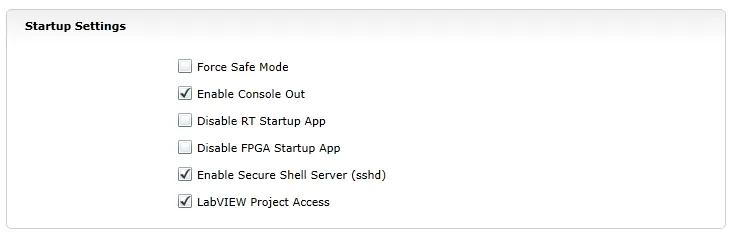
- Forçar Modo Seguro - Força o controlador a entrar no Modo Seguro. Isso pode ser usado para solucionar problemas de imagem, mas é recomendado usar o botão de reset no roboRIO para colocar o dispositivo em Modo Seguro (com a energia já aplicada, segure o botão de reset por 5 segundos). O padrão é não marcado.
- Habilitar Saída de Console - Isso habilita a porta RS232 onboard para ser usada como saída de console. É recomendado deixar isso habilitado a menos que você esteja usando esta porta para se comunicar com um dispositivo serial (note que esta porta usa níveis RS232 e não deve ser conectada a muitos microcontroladores que usam níveis TTL). O padrão é marcado.
- Desabilitar Aplicativo de Inicialização de RT - Marcar esta caixa impede que o código seja executado na inicialização. Isso pode ser usado para solucionar problemas se o roboRIO não responder a novos downloads de programas. O padrão é não marcado.
- Desabilitar Aplicativo de Inicialização de FPGA - Esta caixa não deve ser marcada.
- Habilitar Servidor Shell Seguro (sshd) - É recomendado deixar esta caixa marcada. Esta configuração habilita o SSH, que é uma maneira de acessar remotamente um console no roboRIO. Desmarcar esta caixa impedirá que equipes de C++ e Java carreguem código no roboRIO.
- Acesso a Projetos LabVIEW - É recomendado deixar esta caixa marcada. Esta configuração permite que projetos LabVIEW acessem o roboRIO.
Configuração de Rede
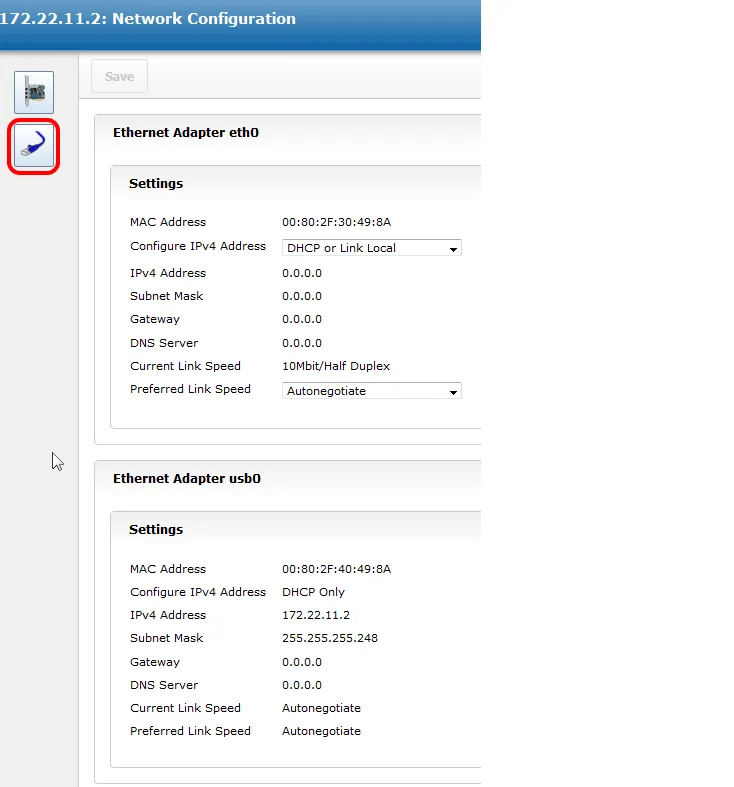
Essa página mostra a configuração dos adaptadores de rede do roboRIO. Não é recomendado mudar qualquer configuração nessa página.