REV Hardware Client 2
O REV Hardware Client 2 (RHC2) é um software desenvolvido para facilitar o gerenciamento de dispositivos REV para o usuário.
Visão Geral e Instalação
O REV Hardware Client 2 (RHC2) é um software desenvolvido para facilitar o gerenciamento de dispositivos REV para o usuário. Este cliente detecta automaticamente os dispositivos conectados, baixa a versão mais recente do software para esses dispositivos e permite a atualização contínua dos mesmos.
Baixe a última versão do REV Hardware Client 2
REV Hardware Client 2 Download - Todas as versões
Instruções de instalação
- Baixe o instalador do RHC2
- Abra o instalador
- Abra o aplicativo
Sumário de funcionalidades
- Detecção automática de dispositivos compatíveis quando conectados via USB
- Atualização com um clique de todos os softwares em dispositivos conectados
- Pré-download de atualizações de software sem a necessidade de um dispositivo conectado
- Backup e restauração de dados do usuário em dispositivos compatíveis
- Atualização automática para a versão mais recente do REV Hardware Client 2
Dispositivos compatíveis
- REV SPARK Flex (REV-11-2159)
- REV SPARK MAX (REV-11-2158)
- REV Power Distribution Hub (REV-11-1850)
- REV Pneumatic Hub (REV-11-1852)
- REV Servo Hub (REV-11-1855)
- Dispositivos CAN genéricos
Requerimentos de dispositivos REV
Os dispositivos REV devem estar executando versões de firmware 26.x.x ou mais recentes para serem compatíveis com o REV Hardware Client 2. Dispositivos com firmware 2025 ou anterior precisarão ser atualizados para o firmware 2026 por meio do Modo de Recuperação antes do uso.
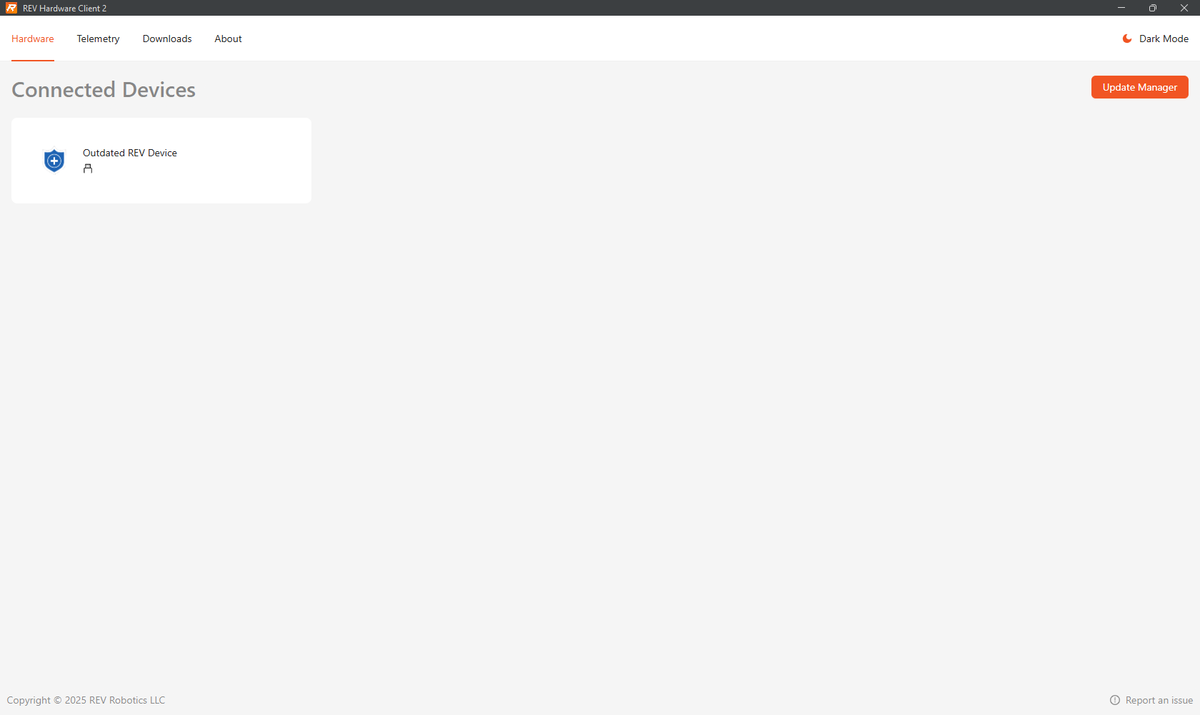
Se o seu dispositivo REV aparecer no REV Hardware Client 2 como um "Dispositivo REV desatualizado", siga as instruções do Modo de Recuperação para atualizar o firmware.
Navegando o Client
Guia de Hardware
A aba Hardware é onde os dispositivos de hardware compatíveis são gerenciados no REV Hardware Client. Ao abrir o REV Hardware Client, a aba Hardware é exibida.
Nenhum hardware detectado
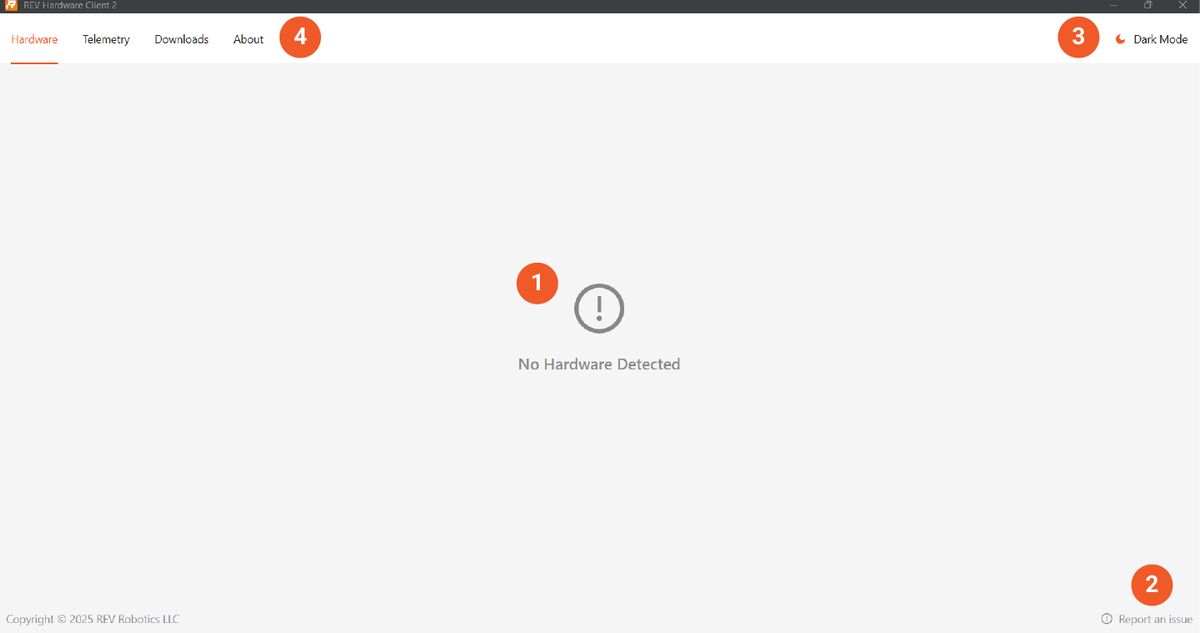
- Busca de dispositivos - Quando um hardware REV compatível é conectado a um PC com Windows ou Mac, o cliente buscará automaticamente novos dispositivos.
- Reportar um problema - Se estiver enfrentando dificuldades técnicas com o Cliente de Hardware REV ou um dispositivo REV relacionado, clique neste botão para enviar um relatório de diagnóstico diretamente para a equipe de suporte.
- Modo escuro - Clique para alternar o REV Hardware Client para o modo escuro nativo.
- Navegação - Quatro abas estão localizadas na parte superior do REV Hardware Client, permitindo que você navegue pelas diferentes funcionalidades.
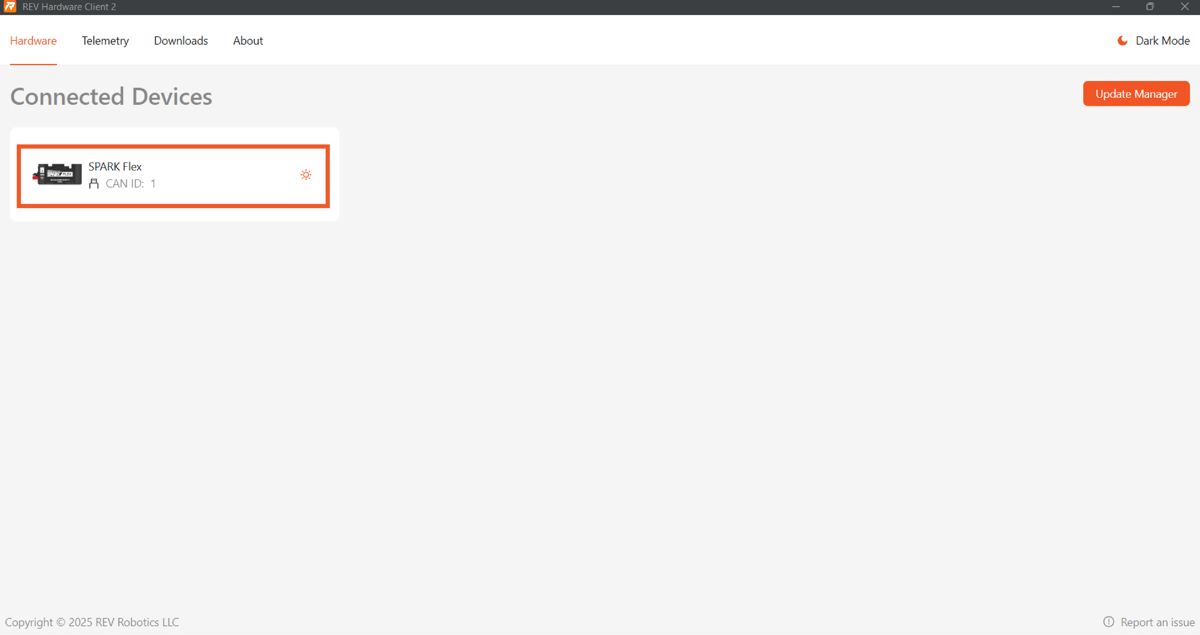
Hardware detectado
Conectar o hardware compatível a um PC com Windows e com o REV Hardware Client em execução fará com que os dispositivos sejam automaticamente detectados e adicionados à guia Hardware.
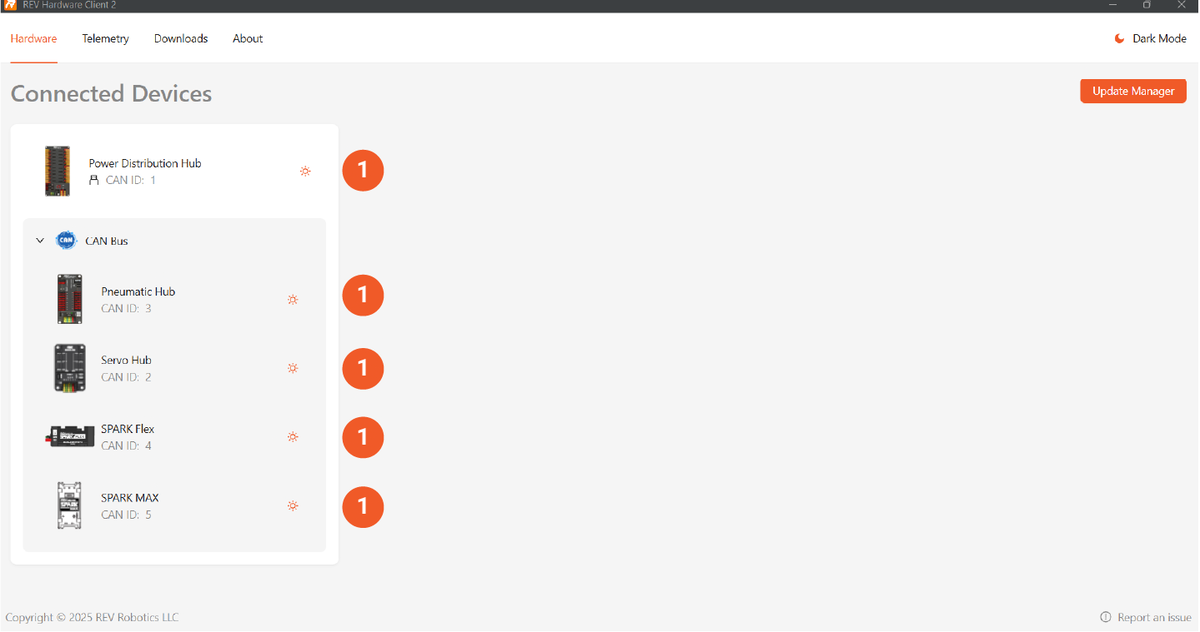
- Hardware compatível - Cada tipo de hardware compatível será exibido. Clicar no hardware abrirá o menu do dispositivo correspondente.
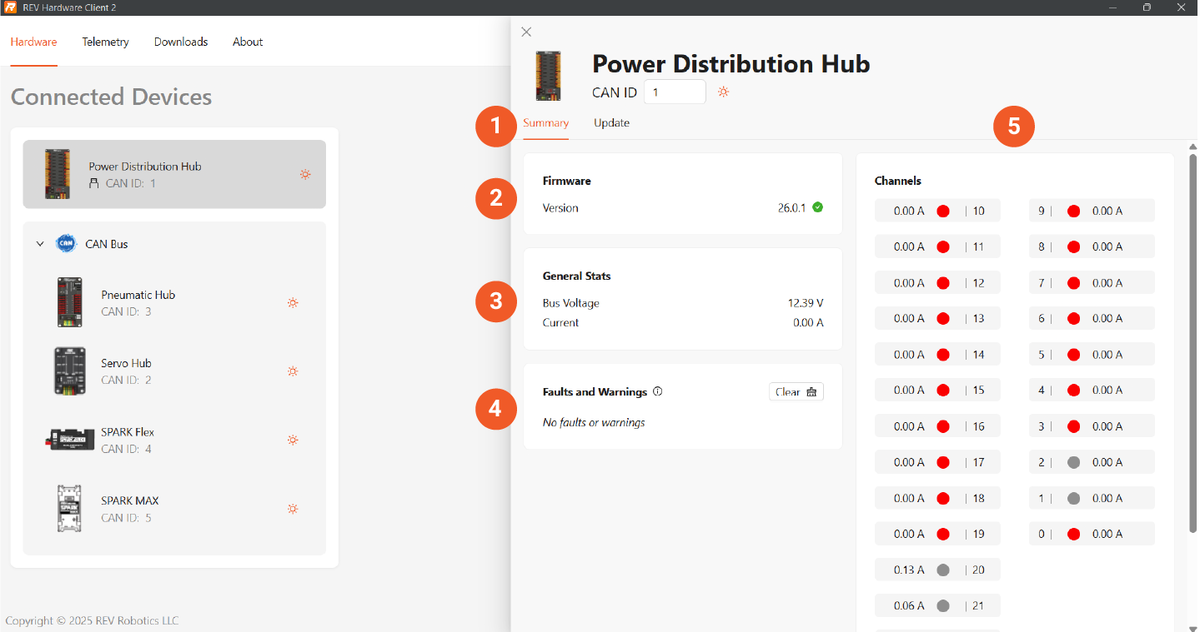
Menu de dispositivos - Sumário
Selecionar um dispositivo abrirá o menu correspondente. Abaixo, você encontrará uma captura de tela do menu Resumo do Hub de Distribuição de Energia.
Guia de telemetria
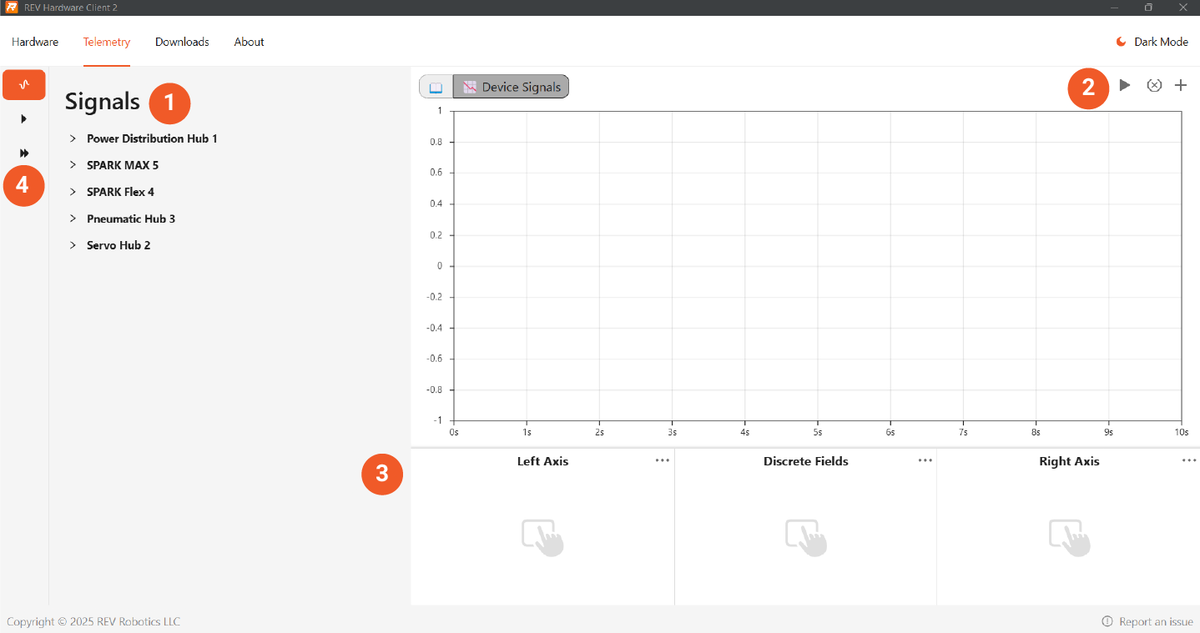
- Sinais - Aqui você pode selecionar diferentes sinais para dispositivos REV.
- Gráfico de Início e Reinício - Iniciar inicia a gravação da telemetria.
- Chave de Sinal e Ajuste de Escala - Os sinais que você escolher monitorar serão exibidos aqui.
- Executar um ou vários motores - Clique no botão de execução simples ou dupla para executar um ou vários motores para teste.
Guia de downloads
A aba Downloads é onde os arquivos de software baixados são gerenciados. As atualizações de software mais recentes podem ser baixadas sem que um dispositivo de hardware esteja conectado ao REV Hardware Client.
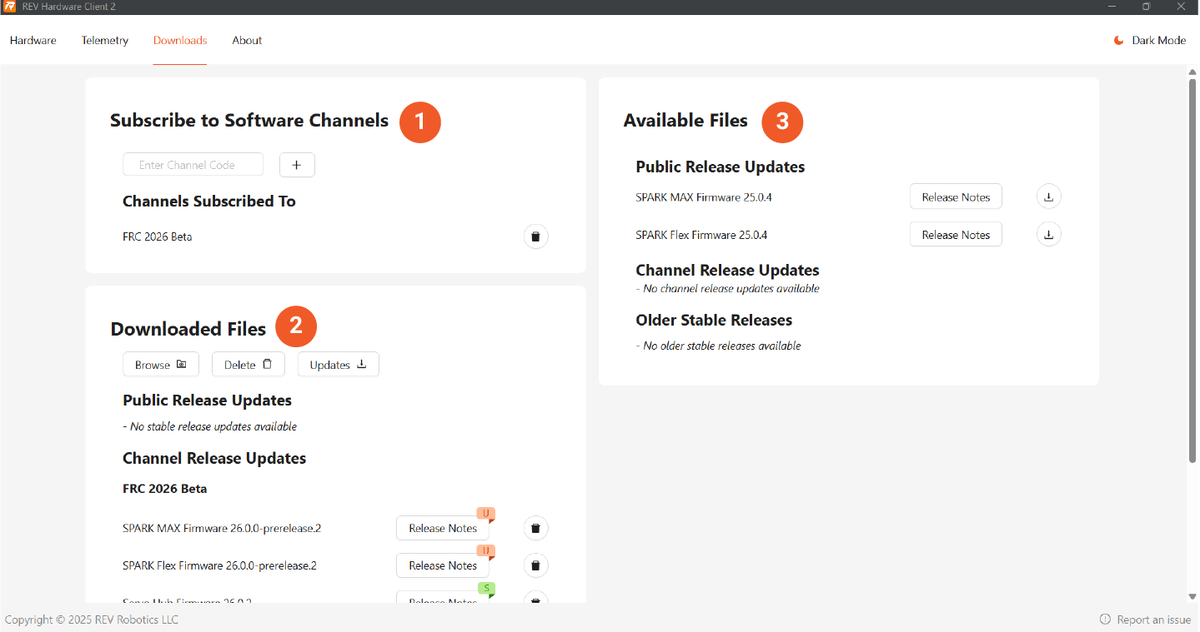
- Canais de Software - Se você obtiver um código de canal para testar um software beta, basta inserir o código e pressionar o sinal de mais (+) para acessá-lo.
- Arquivos de Atualização Baixados - Esta seção permite visualizar cada versão do software já baixada, verificar as notas de versão e excluir os arquivos do computador.
- Arquivos de Atualização Disponíveis - Esta seção exibe a versão mais recente do software para download, as notas de versão e um botão para iniciar o download.
Guia de informações
A aba "Sobre" é onde o cliente de hardware REV é gerenciado. Aqui, as atualizações para o cliente de hardware REV são verificadas, baixadas e instaladas.
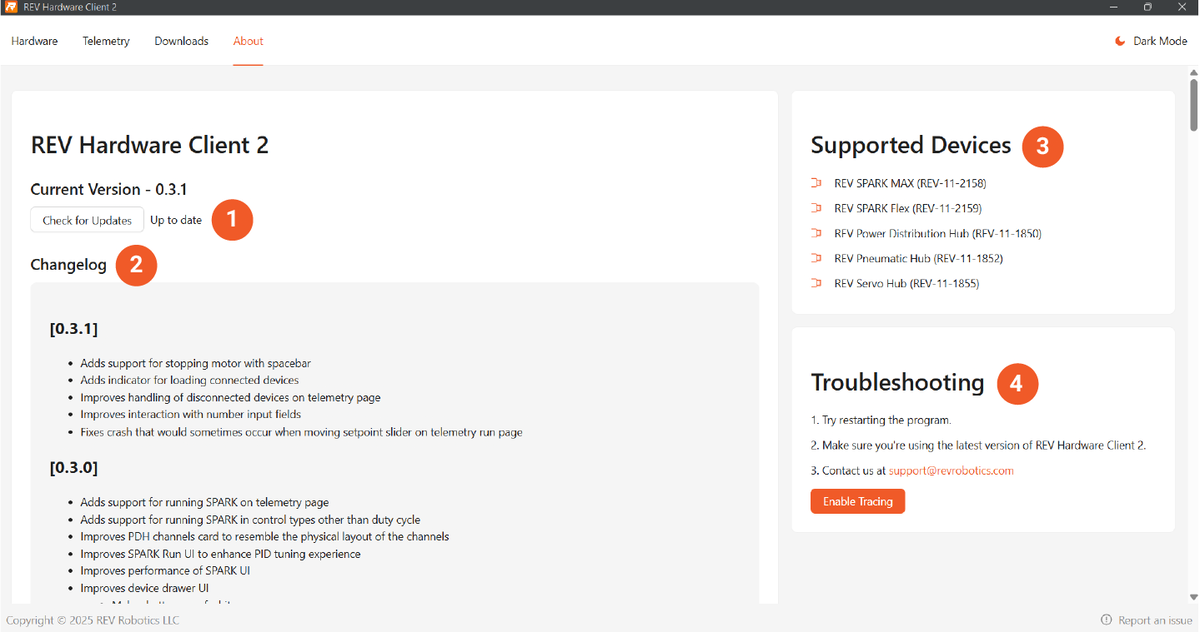
- Verificar atualizações - Esta seção exibe a versão atual do REV Hardware Client e permite verificar se há atualizações de software disponíveis para o REV Hardware Client.
- Registro de alterações - Lista todas as alterações significativas, melhorias, correções de bugs e novos recursos implementados no REV Hardware Client 2 até o momento.
- Dispositivos compatíveis - Esta seção lista todos os dispositivos atualmente compatíveis com a versão do REV Hardware Client instalada no dispositivo do usuário.
- Solução de problemas - Se você estiver enfrentando dificuldades técnicas com o REV Hardware Client, siga estas etapas primeiro.
Solução de problemas
Observe que não é possível atualizar o Hardware Client original para o Hardware Client 2. Você precisa instalar o Hardware Client 2 separadamente, pois são aplicativos completamente diferentes. Embora possam ser instalados simultaneamente, não é recomendável mantê-los abertos ao mesmo tempo.
Dispositivo não aparece
Se você não visualizar todos os dispositivos que espera, siga estes passos:
- Certifique-se de estar conectado à internet para que o Windows possa baixar os drivers necessários.
- Desconecte o dispositivo do computador e, em seguida, reconecte-o.
Usuários de Mac e Modo de recuperação
Se você pretende usar o RHC2 em um computador macOS, observe que os dispositivos em modo de recuperação só aparecerão no Mac se o aplicativo for copiado para a pasta /Applications.
Controlador de motor SPARK MAX
- Certifique-se de que o SPARK MAX não esteja sendo usado por outro aplicativo, como o REV SPARK MAX Client.
- Desconecte o SPARK MAX do computador e conecte-o novamente.
Compatibilidade de firmware
Para usar seu dispositivo com o RHC2, você precisa ter o firmware 2026 (v26.x.x). Dispositivos com firmware 2025 ou inferior devem ser atualizados para a versão 2026 através do Modo de recuperação. Os dispositivos SPARK podem ser atualizados via CAN com o RHC2 se o dispositivo de ponte (o dispositivo conectado à porta USB) estiver atualizado para o firmware 2026.
Modo de recuperação
Às vezes, ao atualizar o firmware de um dispositivo do Sistema de Controle ION, o processo pode ser interrompido ou o firmware pode ser corrompido por um download incorreto ou outro tipo de interrupção na transferência de dados. Nesse caso, o LED de status ficará apagado ou com brilho fraco e o dispositivo deixará de funcionar. Existe um modo de recuperação integrado que pode forçar o dispositivo a aceitar o novo firmware, mesmo que o controlador pareça estar inutilizável. O procedimento para isso está descrito abaixo:
Ao executar este procedimento, todos os dados e configurações do dispositivo serão apagados. Você precisará reconfigurar o dispositivo após entrar no modo de recuperação.
Materiais necessários
- Uma pequena ferramenta, como um clipe de papel desdobrado ou uma ferramenta de remoção de cartão SIM, para pressionar o botão Modo.
- Cabo USB-C para USB-A com capacidade de transferência de dados.
- Computador com o REV Hardware Client 2 instalado e atualizado para a versão mais recente.
Passos para utilizar o modo de recuparação
- Com o dispositivo desligado, pressione e mantenha pressionado o botão Modo.
- Ainda pressionando o botão Modo, conecte o dispositivo ao computador usando o cabo USB-C. O LED de status não acenderá – isso é normal.
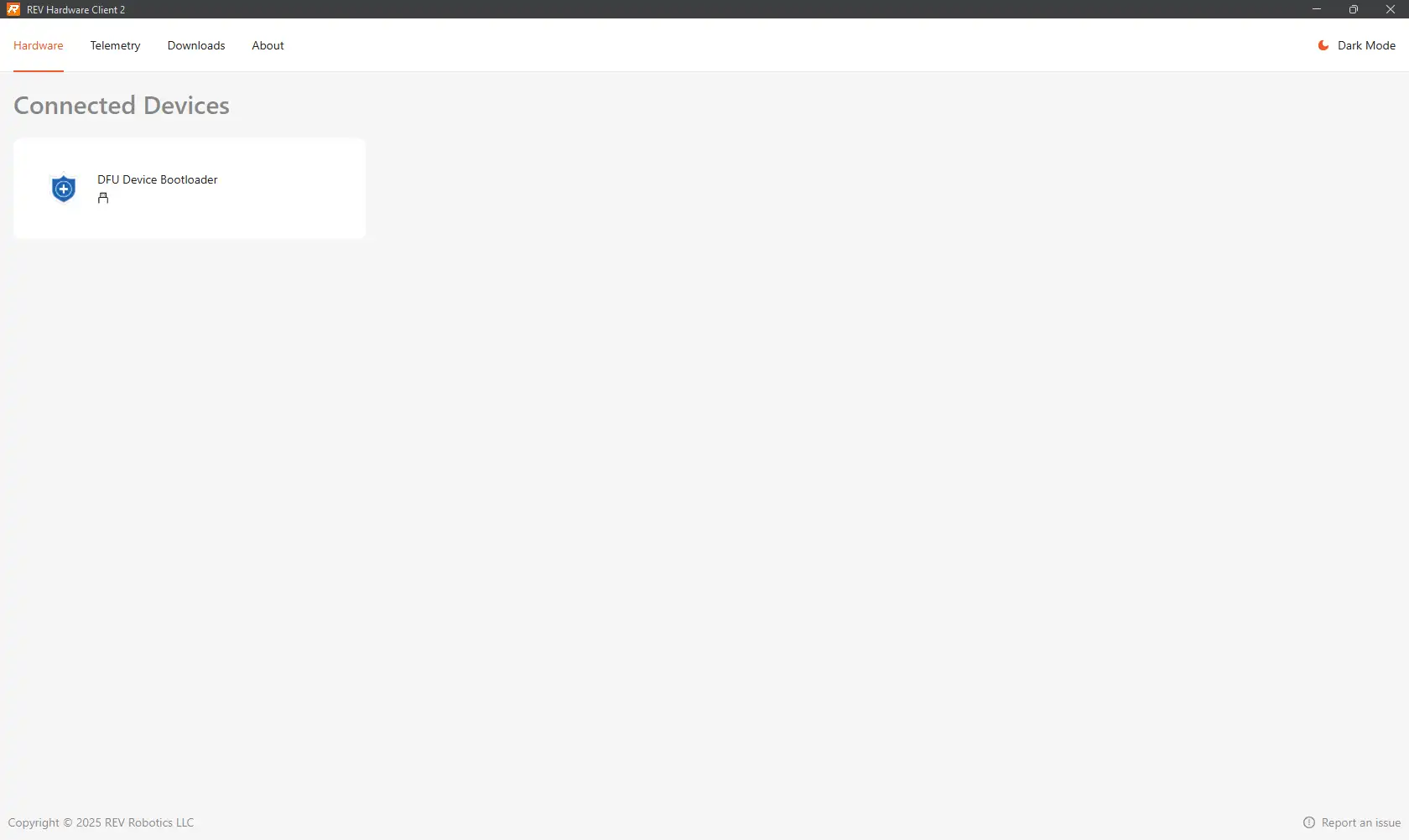
- Com o REV Hardware Client 2 em execução no computador, aguarde alguns segundos até que o sinal sonoro ou o ícone do dispositivo seja reconhecido e, em seguida, solte o botão Modo. Nenhuma luz acenderá no dispositivo durante esta etapa do processo. Isso é normal.
- Selecione o Bootloader do Dispositivo DFU na lista de Dispositivos Conectados na janela do REV Hardware Client 2.
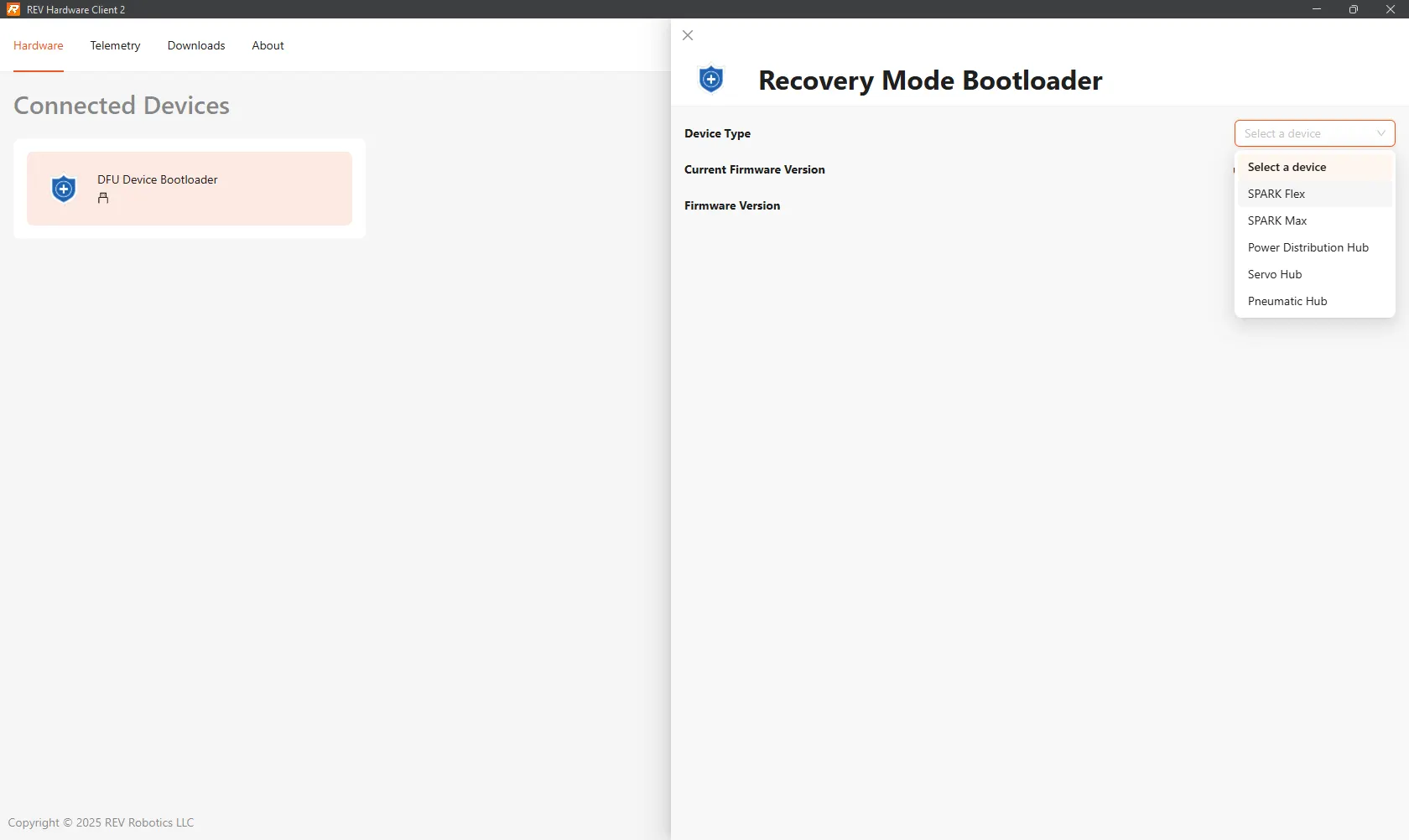
-
Após selecionar o Tipo de Dispositivo correto, o menu suspenso Versão Atual do Firmware selecionará automaticamente o firmware mais recente. Se desejar instalar uma versão diferente do firmware, selecione-a neste menu agora. Para usar o Cliente de Hardware REV 2, este firmware ainda precisará ser a versão 26.x.x ou mais recente.
-
Aguarde a conclusão da atualização do software.
-
Reinicie o dispositivo (desconecte e reconecte o cabo USB-C), clique no ícone do dispositivo e, em seguida, corrija quaisquer erros persistentes que possam aparecer.
Recuperação de firmware concluída!
Guias
Faça girar!
Ligar
Agora que o dispositivo está conectado e as conexões foram cuidadosamente verificadas, ligue o robô. Você deverá ver o LED SPARK Flex piscando lentamente, indicando a presença de um novo dispositivo; a cor será magenta. Se o LED estiver apagado ou se você observar um padrão de piscada diferente, consulte o guia de LEDs de status para solucionar o problema.
Se estiver usando um motor com escovas, você poderá ver um erro no sensor. Isso é esperado até que você configure o dispositivo para aceitar um motor com escovas seguindo os passos abaixo.
Conecte ao SPARK Flex
Se você não conseguir visualizar o SPARK Flex, verifique se ele não está sendo usado por outro aplicativo. Em seguida, desconecte o SPARK Flex do computador e conecte-o novamente.
Configuração e instalação básica
Antes de alterar qualquer parâmetro, você precisa atribuir um ID CAN exclusivo ao dispositivo. Esse ID pode ser qualquer número entre 1 e 63. Após definir um ID CAN exclusivo, a interface do usuário será atualizada e permitirá que você altere outros parâmetros.
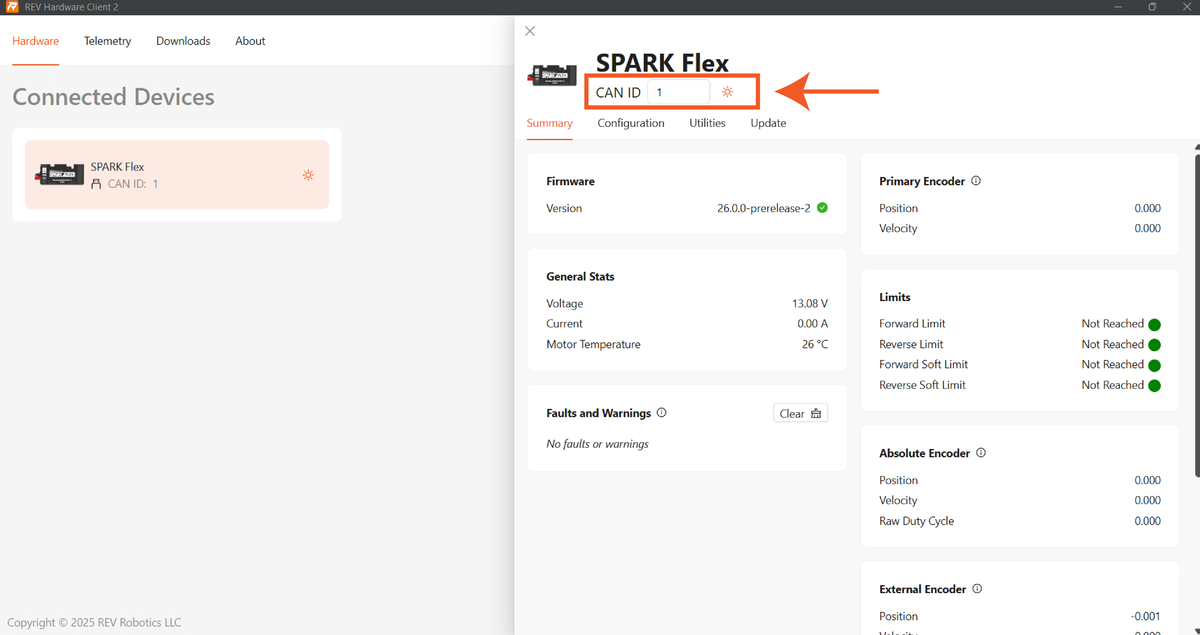
Eventualmente, você poderá configurar uma rede CAN em sua bancada de testes ou robô. Certifique-se de que cada dispositivo na rede tenha um ID CAN exclusivo. É útil etiquetar cada dispositivo com seu número de ID para facilitar a solução de problemas.
Definir o tipo de motor
Se estiver usando um NEO ou NEO 550, verifique se o tipo de motor está definido como REV NEO Brushless, o tipo de sensor como Hall Effect e se o LED está piscando em magenta ou ciano.
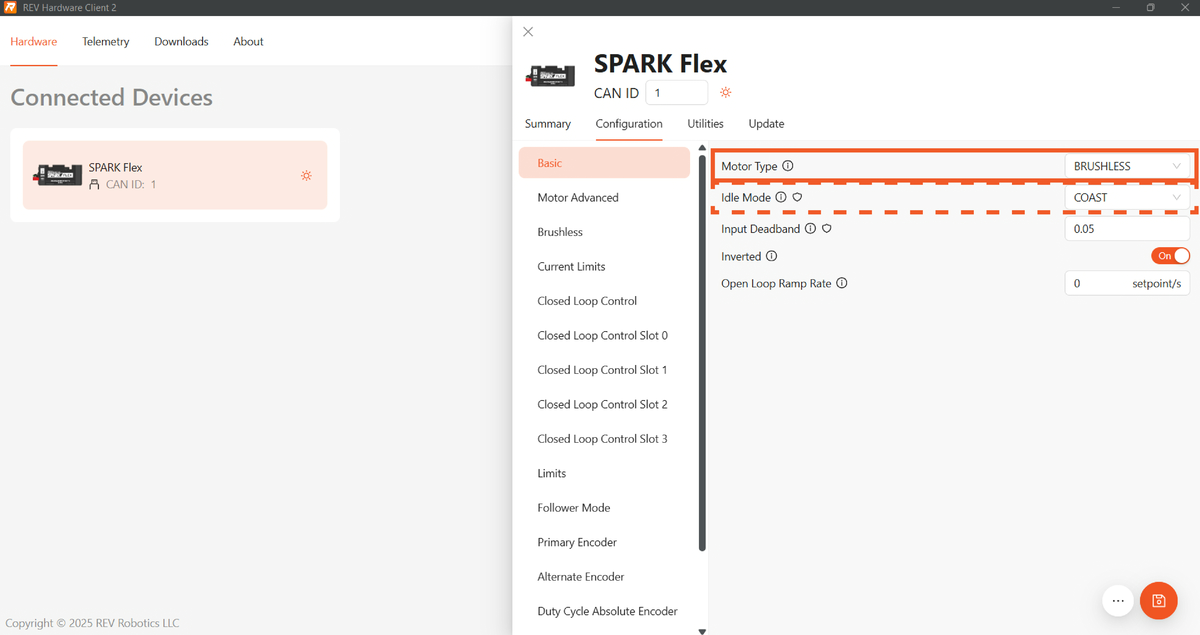
Se você vir um código de erro piscando "Falha no Sensor", verifique se o cabo do encoder está completamente conectado.
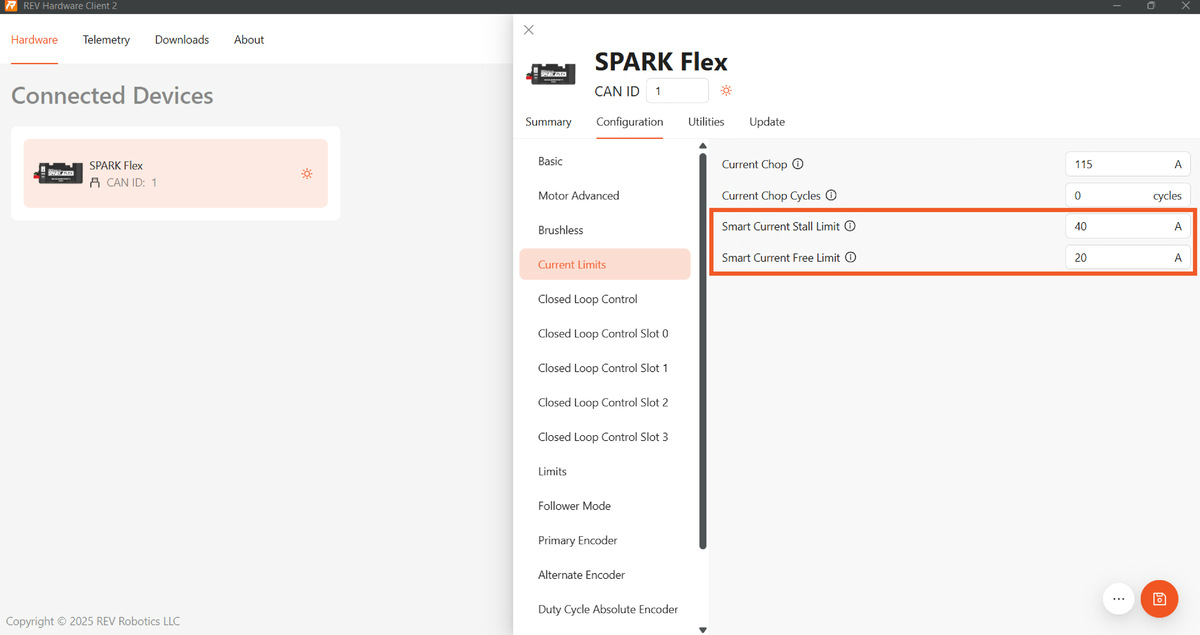
Limitação de corrente
Existem duas maneiras de proteger os motores do seu robô contra danos elétricos em situações de alta corrente: disjuntores e a configuração de Limite de Corrente Inteligente do SPARK Flex. Para proteger seus motores de correntes excessivas, a melhor prática é limitar a corrente tanto com o Limite de Corrente Inteligente do SPARK Flex quanto com um disjuntor com a capacidade adequada.
Os disjuntores, embora sejam uma parte extremamente importante da fiação e da segurança de um robô, são projetados para desarmar apenas em uma temperatura específica, após um determinado período de tempo, para proteger o sistema elétrico contra incêndio ou outros riscos elétricos. Por isso, recomendamos configurar um Limite de Corrente Inteligente para proteger seus motores contra danos causados por altas correntes.
O Controlador de Motor SPARK Flex inclui um recurso de Limite de Corrente Inteligente que ajusta a saída aplicada ao motor para manter uma corrente de fase constante.
Por padrão, a configuração do Limite de Corrente Inteligente do SPARK Flex é de 80 A para qualquer motor utilizado. Recomendamos utilizar nossos dados de teste de rotor bloqueado ou a tabela abaixo para decidir qual o valor ideal para o Limite de Corrente Inteligente do seu robô: Teste de Rotor Bloqueado para o NEO (REV-21-1650) e NEO 550 (REV-21-1651).
Lembre-se de que algumas configurações, como o Limite Inteligente de Corrente, devem ser gravadas na memória flash por meio de código ou do Hardware Client para serem mantidas após um ciclo de energia do SPARK Flex.
Limite de corrente sugerido
O limite de corrente ideal pode variar dependendo da sua aplicação específica, mas esses valores podem ser usados como ponto de partida para reduzir a probabilidade de sobrecarga no motor ao começar a ajustar o Limite de Corrente Inteligente do seu mecanismo.
| Tipo de motor | Faixa limite de corrente |
|---|---|
| NEO (REV-21-1650) | 40A - 60A |
| NEO 550 (REV-21-1651) | 20A - 40A |
Aviso: Definir limites de corrente fora dos intervalos sugeridos acima pode causar sobrecarga não intencional e danos graves aos componentes, que não são cobertos pela garantia.
Salve as configurações
As configurações devem ser salvas para que o SPARK Flex se lembre da nova configuração mesmo após ser desligado e ligado novamente. Para isso, pressione o botão "Persistir Parâmetros" no canto inferior direito da página. Levará alguns segundos para salvar, o que será indicado pelo símbolo de carregamento no botão.
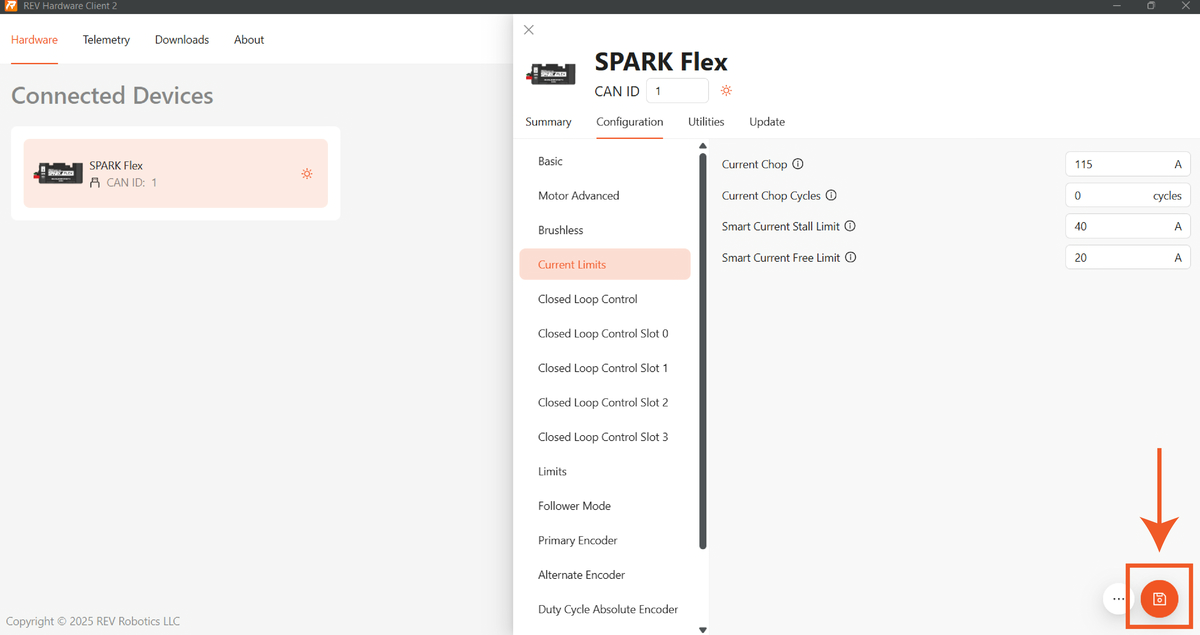
Quaisquer configurações salvas desta forma serão lembradas quando o dispositivo for ligado novamente. Você sempre poderá restaurar as configurações de fábrica se precisar redefinir o dispositivo.
Gire o motor
Antes de ligar qualquer motor, certifique-se de que todos os componentes estejam em boas condições de funcionamento, que o motor esteja bem fixado e que todos os presentes estejam cientes do perigo. Os motores FRC são muito potentes e podem causar danos a pessoas e propriedades rapidamente.
Se o ID CAN do SPARK ainda estiver definido como 0 ao tentar acionar o motor, ele não girará. Certifique-se de que o ID CAN foi configurado corretamente e de que você clicou no botão "Persistir parâmetros" após a configuração.
Mantenha o cabo CAN desconectado durante todo o teste. Por motivos de segurança, o REV Hardware Client não acionará o motor se o roboRIO estiver conectado. Se o roboRIO estiver conectado, reinicie o SPARK Flex.
Para girar o motor, acesse a aba Executar, mantenha todas as configurações padrão e pressione Executar Motor. O ponto de ajuste padrão é 0, o que significa que o motor está em marcha lenta (0% de potência). Ao pressionar Executar, você deverá ver o LED passar de piscando lentamente para acender continuamente, indicando que o motor está em marcha lenta.
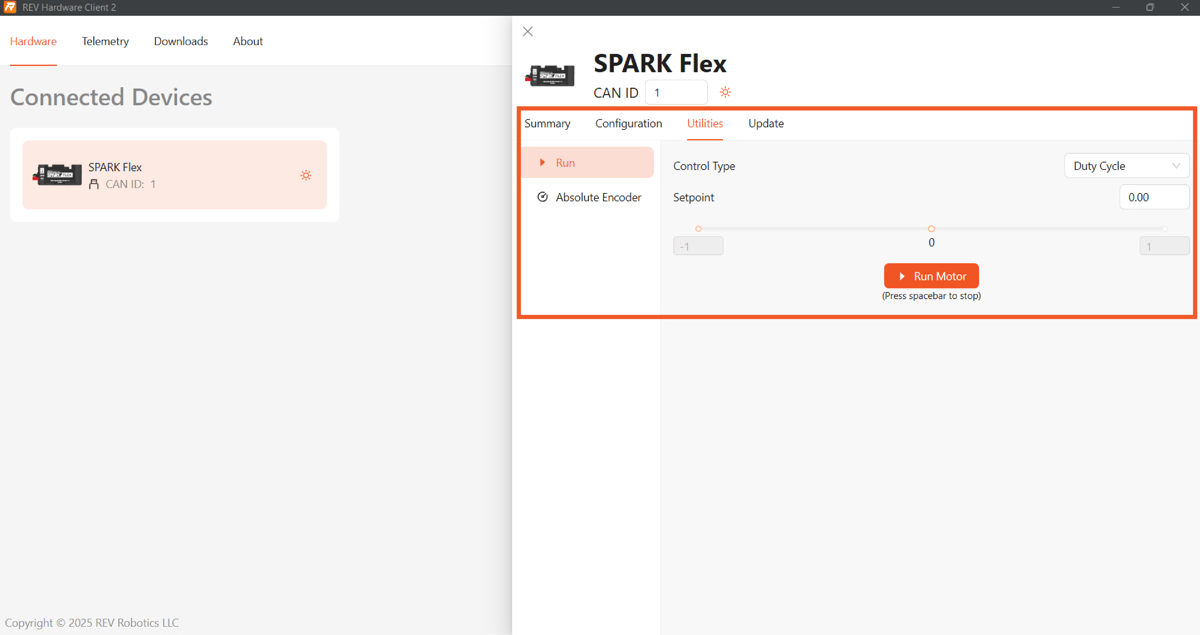
Aumente lentamente o valor do controle deslizante de ponto de ajuste. O motor deve começar a girar e você deverá ver um padrão de luzes verdes piscando proporcional à velocidade que você definiu para o motor. Diminua lentamente o valor do controle deslizante de volta. O motor deve girar no sentido inverso e você deverá ver um padrão de luzes vermelhas piscando proporcional à velocidade que você definiu para o motor.
Se não conseguir girar o motor, consulte nosso guia de solução de problemas.
Calibração Swerve
- Verifique se você montou completamente o seu módulo MAXSwerve ou EasySwerve e se o SPARK Flex ou SPARK MAX do motor de direção está conectado ao encoder Through Bore do módulo.
- Instale e abra a versão mais recente do REV Hardware Client.
- Conecte o controlador do motor SPARK do motor de direção diretamente ao seu computador usando o cabo USB-C para USB-A incluso.
- Selecione o SPARK de direção na lista de dispositivos conectados e acesse a guia Atualizar para verificar se o firmware está atualizado.
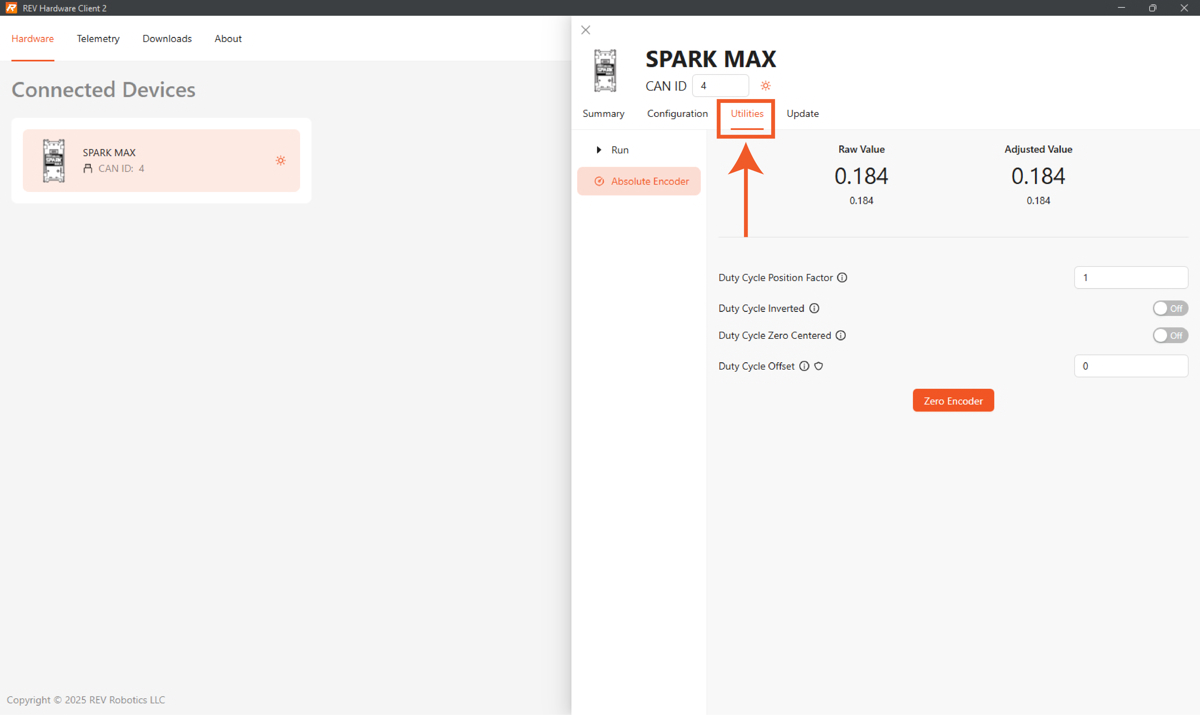
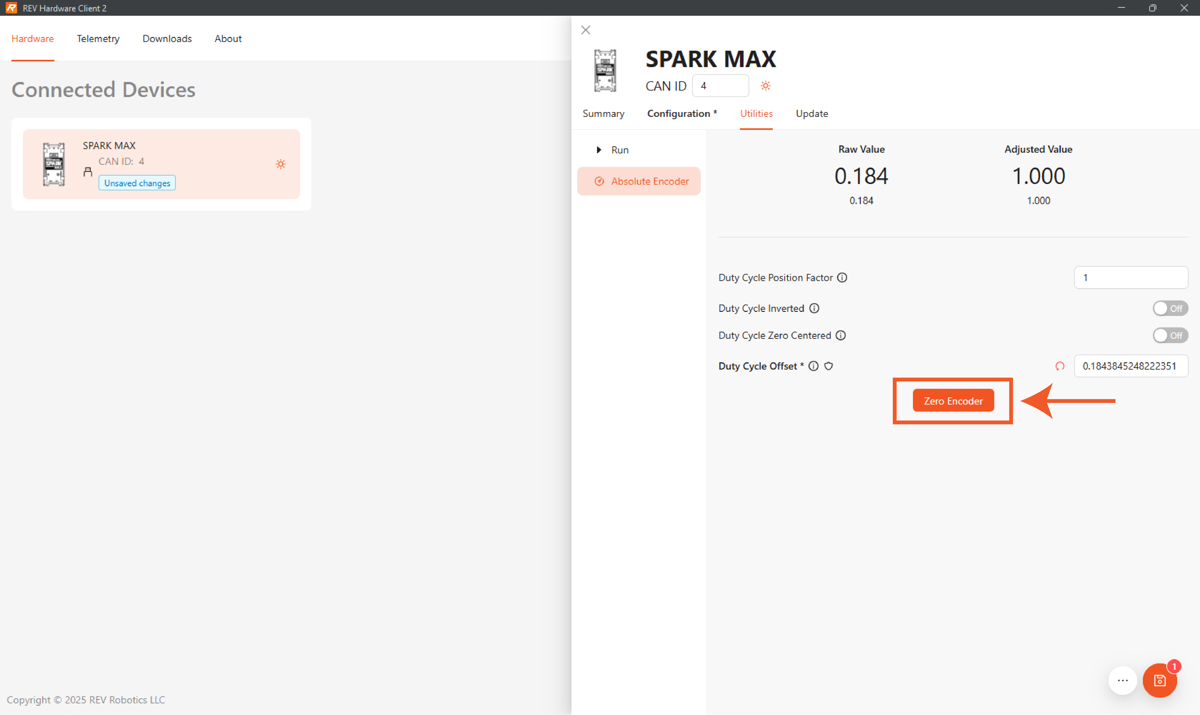
- Certifique-se de que o SPARK de direção ainda esteja selecionado e, em seguida, acesse Encoder Absoluto na guia Utilitários.
- Em seguida, siga os passos abaixo para o Módulo Swerve que você está calibrando para garantir que a posição zero esteja definida corretamente.
Calibração do Easy Swerve
- Insira uma chave hexagonal de 3 mm (1/8 pol.) no encaixe de calibração na parte superior do módulo EasySwerve. Você sentirá a chave hexagonal alcançar a engrenagem de azimute dentro da tampa superior.
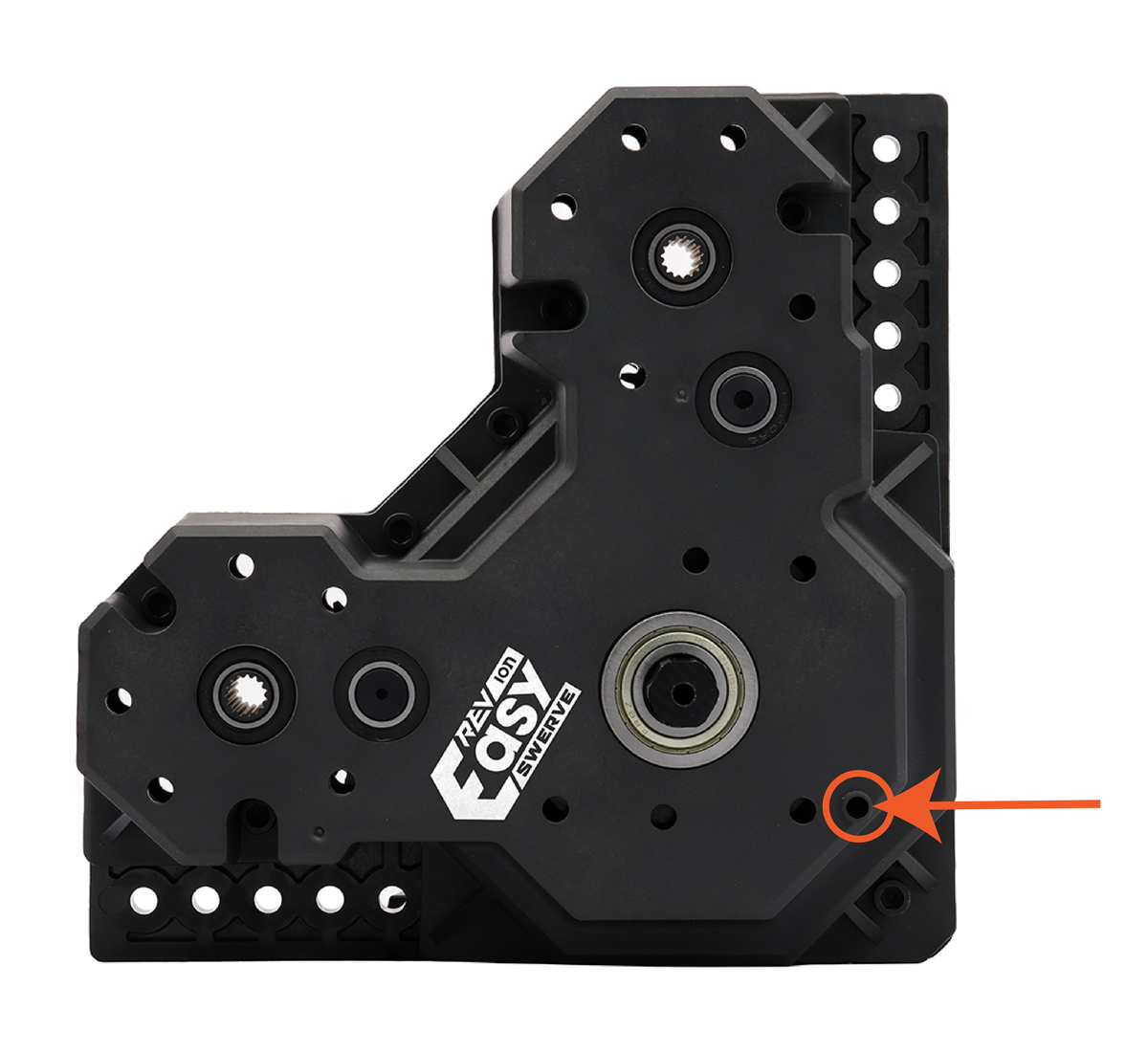
- Gire a roda do módulo manualmente enquanto aplica uma leve pressão na chave hexagonal até que ela se encaixe no alojamento de alinhamento. A chave hexagonal avançará cerca de 6 mm (1/4 de polegada) no módulo de direção quando estiver alinhada.
- Clique no botão Zero Encoder para calibrar a posição zero do encoder absoluto para esta posição.
MAXSwerve
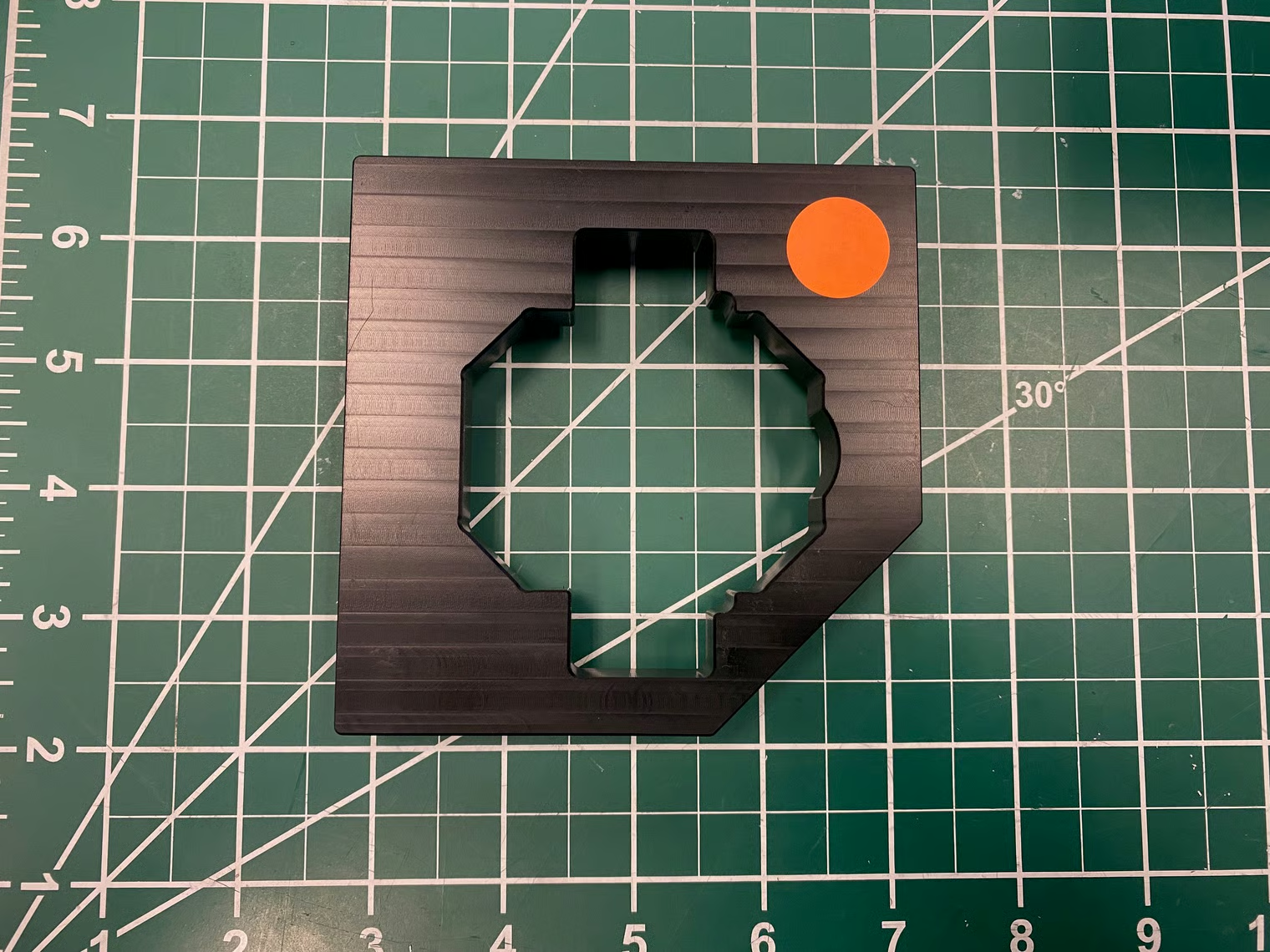
- Coloque a ferramenta de calibração no módulo MAXSwerve.
- A ferramenta de calibração deve ser colocada no módulo MAXSwerve com a aba voltada para o módulo.
- A roda MAXSwerve só encaixa em uma orientação devido à posição da engrenagem cônica. A ferramenta de calibração não é simétrica, portanto, você precisará alinhar a engrenagem cônica com o lado do recorte indicado pelo ponto laranja nesta imagem.
-

-
Gire a roda juntamente com a Ferramenta de Calibração até que a aba da ferramenta se encaixe firmemente ao redor das bordas do módulo MAXSwerve. Assim que isso acontecer, a roda e a Ferramenta de Calibração não poderão girar livremente até que a aba da ferramenta seja levantada acima das bordas do módulo.
-
Clique no botão Definir Offset Zero para calibrar a posição zero do codificador absoluto para esta posição.