Se estiver usando um motor com escovas, você poderá ver um erro no sensor. Isso é esperado até que você configure o dispositivo para aceitar um motor com escovas seguindo os passos abaixo.
## Conecte ao SPARK Flex [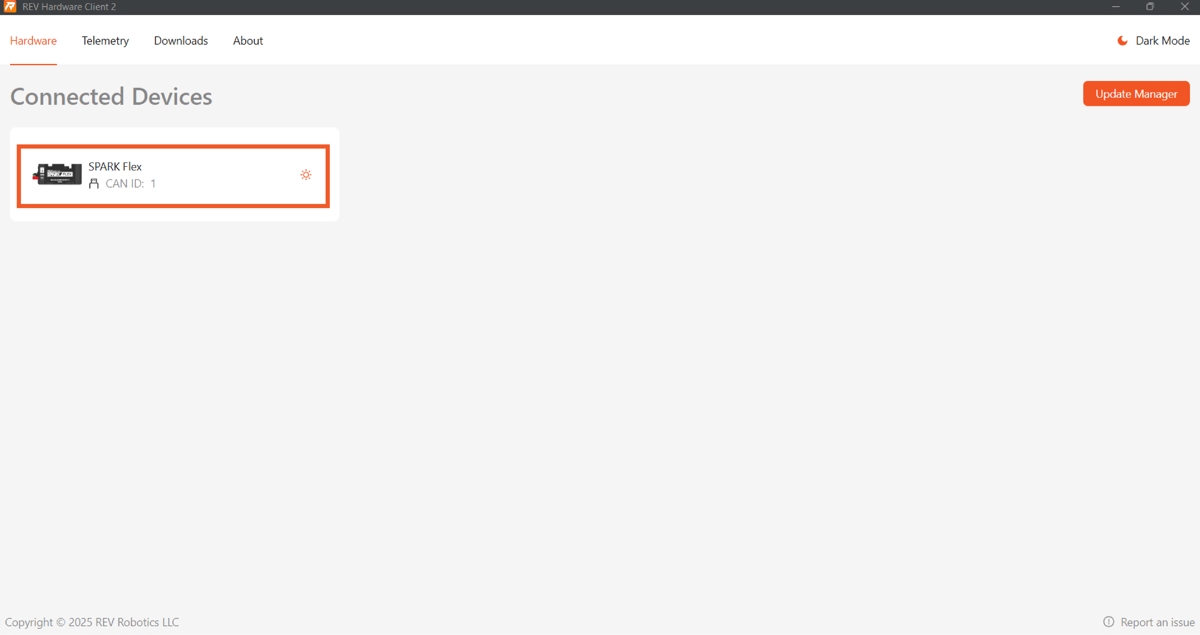](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image-1769797546892.png)Se você não conseguir visualizar o SPARK Flex, verifique se ele não está sendo usado por outro aplicativo. Em seguida, desconecte o SPARK Flex do computador e conecte-o novamente.
## Configuração e instalação básica Antes de alterar qualquer parâmetro, você precisa atribuir um ID CAN exclusivo ao dispositivo. Esse ID pode ser qualquer número entre 1 e 63. Após definir um ID CAN exclusivo, a interface do usuário será atualizada e permitirá que você altere outros parâmetros. [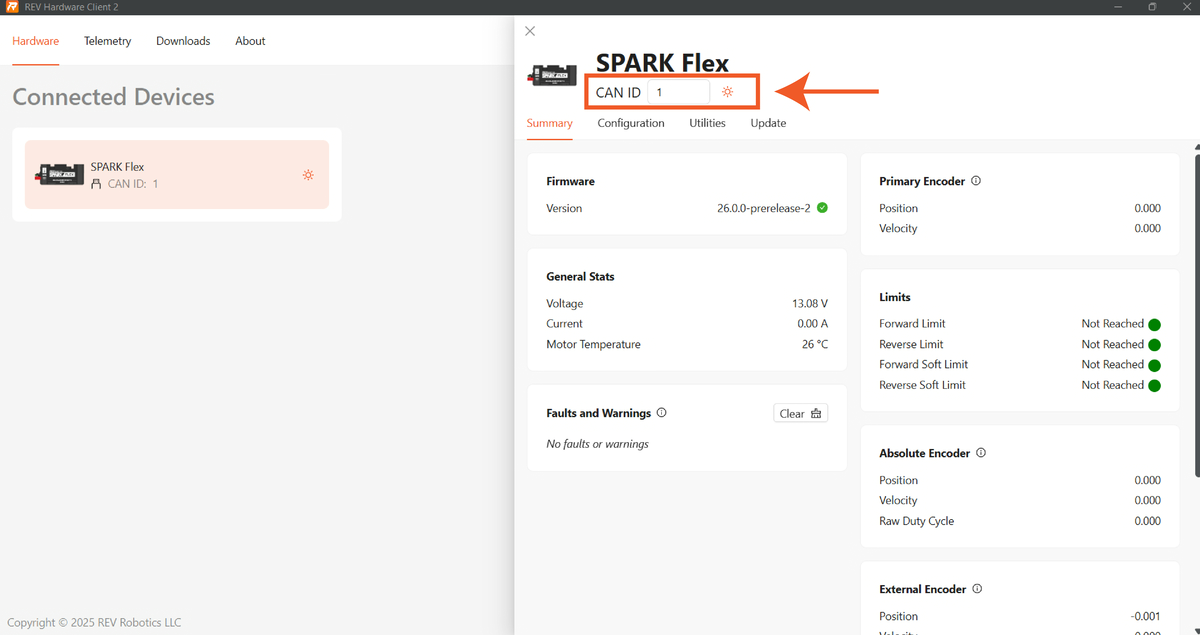](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image-1769797570046.png)Eventualmente, você poderá configurar uma rede CAN em sua bancada de testes ou robô. Certifique-se de que cada dispositivo na rede tenha um ID CAN exclusivo. É útil etiquetar cada dispositivo com seu número de ID para facilitar a solução de problemas.
## Definir o tipo de motor Se estiver usando um NEO ou NEO 550, verifique se o tipo de motor está definido como REV NEO Brushless, o tipo de sensor como Hall Effect e se o LED está piscando em magenta ou ciano. [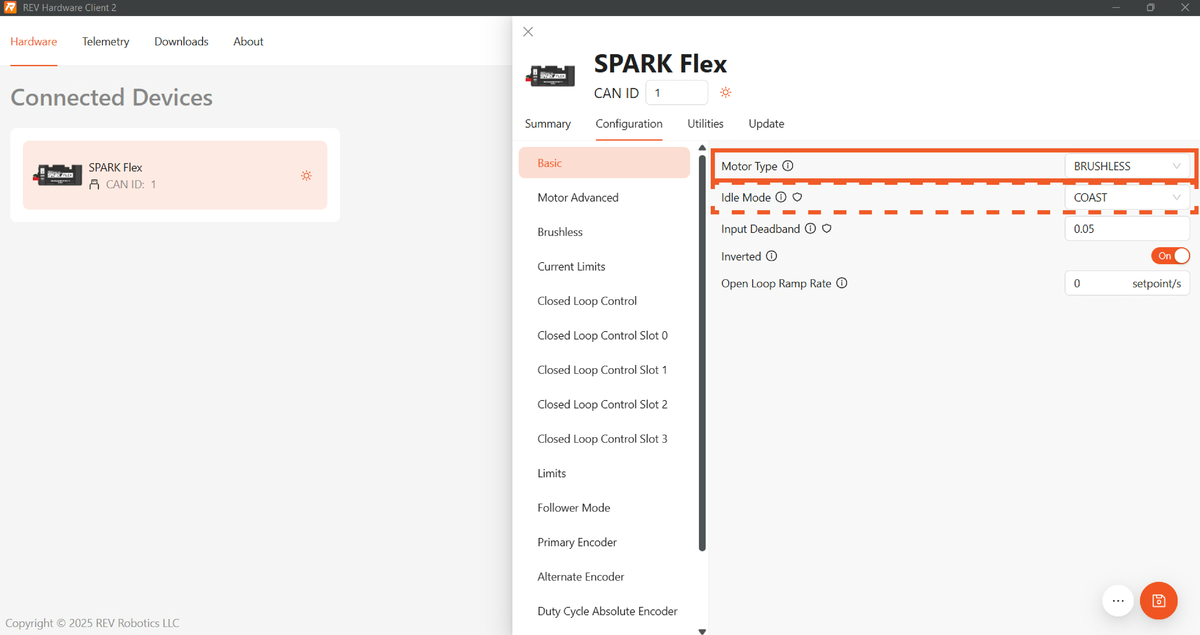](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image-1769797583079.png)Se você vir um código de erro piscando "Falha no Sensor", verifique se o cabo do encoder está completamente conectado.
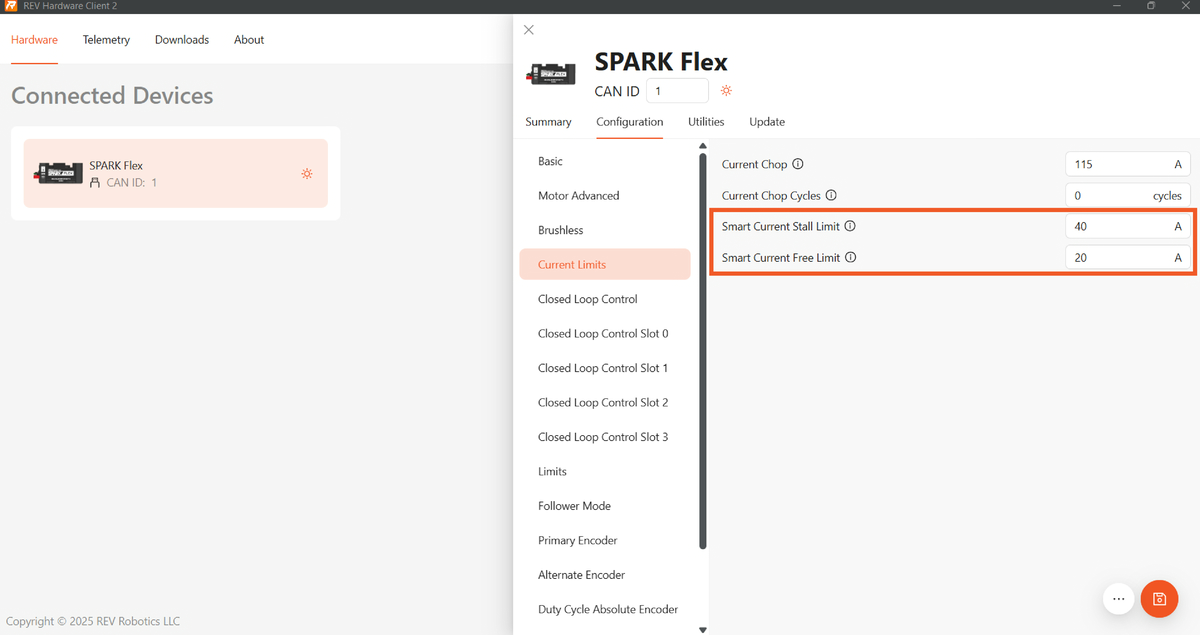
## Limitação de corrente Existem duas maneiras de proteger os motores do seu robô contra danos elétricos em situações de alta corrente: disjuntores e a configuração de Limite de Corrente Inteligente do SPARK Flex. Para proteger seus motores de correntes excessivas, a melhor prática é limitar a corrente tanto com o Limite de Corrente Inteligente do SPARK Flex quanto com um disjuntor com a capacidade adequada. Os disjuntores, embora sejam uma parte extremamente importante da fiação e da segurança de um robô, são projetados para desarmar apenas em uma temperatura específica, após um determinado período de tempo, para proteger o sistema elétrico contra incêndio ou outros riscos elétricos. Por isso, recomendamos configurar um Limite de Corrente Inteligente para proteger seus motores contra danos causados por altas correntes. O Controlador de Motor SPARK Flex inclui um recurso de Limite de Corrente Inteligente que ajusta a saída aplicada ao motor para manter uma corrente de fase constante. Por padrão, a configuração do Limite de Corrente Inteligente do SPARK Flex é de 80 A para qualquer motor utilizado. Recomendamos utilizar nossos dados de teste de rotor bloqueado ou a tabela abaixo para decidir qual o valor ideal para o Limite de Corrente Inteligente do seu robô: Teste de Rotor Bloqueado para o [NEO (REV-21-1650)](https://www.revrobotics.com/neo-brushless-motor-locked-rotor-testing/) e [NEO 550 (REV-21-1651)](https://www.revrobotics.com/neo-550-brushless-motor-locked-rotor-testing/).Lembre-se de que algumas configurações, como o Limite Inteligente de Corrente, devem ser gravadas na memória flash por meio de código ou do Hardware Client para serem mantidas após um ciclo de energia do SPARK Flex.
### Limite de corrente sugerido O limite de corrente ideal pode variar dependendo da sua aplicação específica, mas esses valores podem ser usados como ponto de partida para reduzir a probabilidade de sobrecarga no motor ao começar a ajustar o Limite de Corrente Inteligente do seu mecanismo. | Tipo de motor | Faixa limite de corrente| | --- | --- | --- | |[NEO (REV-21-1650)](https://www.revrobotics.com/rev-21-1650/)| 40A - 60A| |[NEO 550 (REV-21-1651)](https://www.revrobotics.com/rev-21-1651/)| 20A - 40A|Aviso: Definir limites de corrente fora dos intervalos sugeridos acima pode causar sobrecarga não intencional e danos graves aos componentes, que não são cobertos pela garantia.
[](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image-1769797602470.png) ## Salve as configurações As configurações devem ser salvas para que o SPARK Flex se lembre da nova configuração mesmo após ser desligado e ligado novamente. Para isso, pressione o botão "Persistir Parâmetros" no canto inferior direito da página. Levará alguns segundos para salvar, o que será indicado pelo símbolo de carregamento no botão. [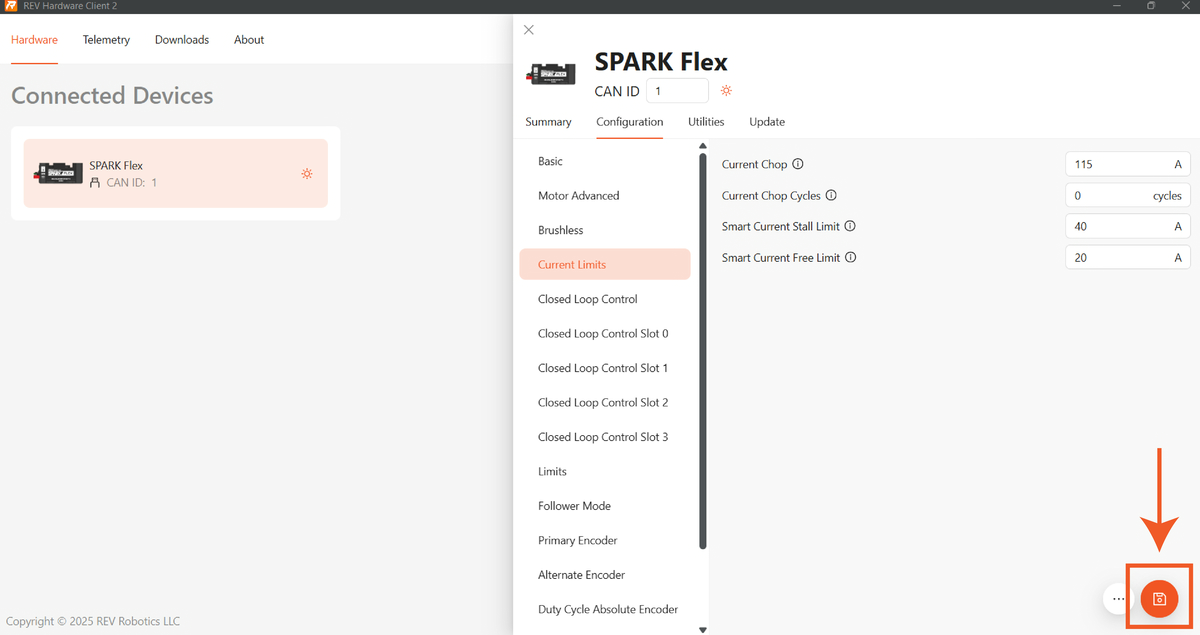](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image-1769797616826.png) Quaisquer configurações salvas desta forma serão lembradas quando o dispositivo for ligado novamente. Você sempre poderá restaurar as configurações de fábrica se precisar redefinir o dispositivo. ## Gire o motorAntes de ligar qualquer motor, certifique-se de que todos os componentes estejam em boas condições de funcionamento, que o motor esteja bem fixado e que todos os presentes estejam cientes do perigo. Os motores FRC são muito potentes e podem causar danos a pessoas e propriedades rapidamente.
Se o ID CAN do SPARK ainda estiver definido como 0 ao tentar acionar o motor, ele não girará. Certifique-se de que o ID CAN foi configurado corretamente e de que você clicou no botão "Persistir parâmetros" após a configuração.
Mantenha o cabo CAN desconectado durante todo o teste. Por motivos de segurança, o REV Hardware Client não acionará o motor se o roboRIO estiver conectado. Se o roboRIO estiver conectado, reinicie o SPARK Flex.
Para girar o motor, acesse a aba Executar, mantenha todas as configurações padrão e pressione Executar Motor. O ponto de ajuste padrão é 0, o que significa que o motor está em marcha lenta (0% de potência). Ao pressionar Executar, você deverá ver o LED passar de piscando lentamente para acender continuamente, indicando que o motor está em marcha lenta. [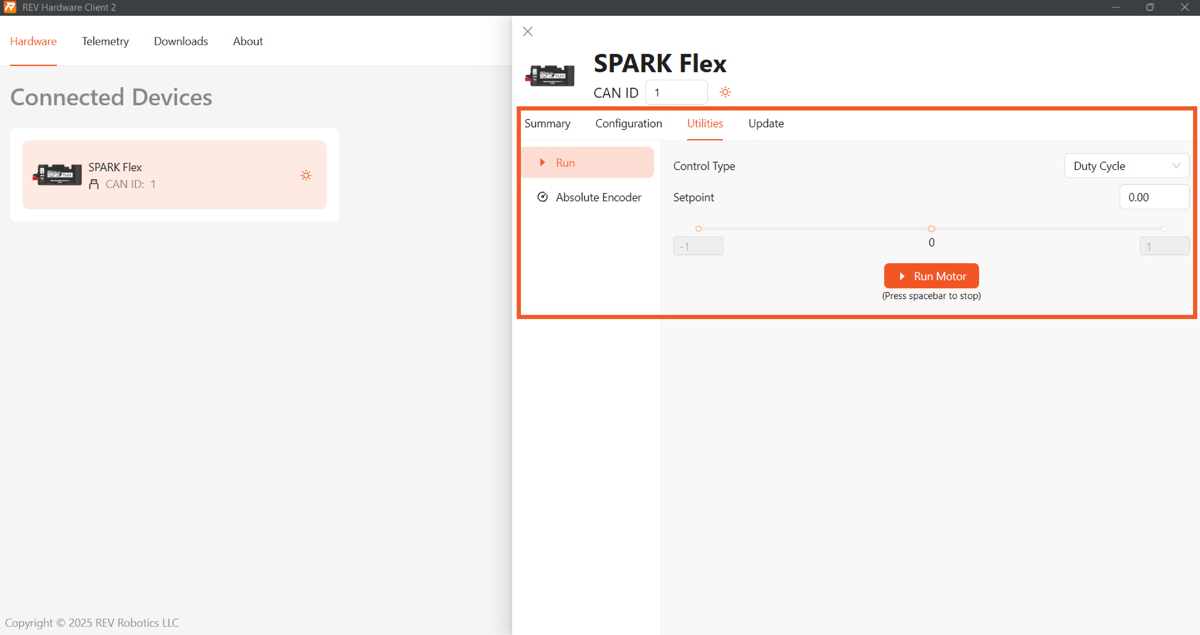](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image-1769797628993.png) Aumente lentamente o valor do controle deslizante de ponto de ajuste. O motor deve começar a girar e você deverá ver um padrão de luzes verdes piscando proporcional à velocidade que você definiu para o motor. Diminua lentamente o valor do controle deslizante de volta. O motor deve girar no sentido inverso e você deverá ver um padrão de luzes vermelhas piscando proporcional à velocidade que você definiu para o motor. Se não conseguir girar o motor, consulte nosso guia de [solução de problemas](https://docs.stemos.com.br/books/sparkmax/page/solucao-de-problemas-NLt). # Calibração Swerve --- 1. Verifique se você montou completamente o seu módulo MAXSwerve ou EasySwerve e se o SPARK Flex ou SPARK MAX do motor de direção está conectado ao encoder Through Bore do módulo. 2. Instale e abra a versão mais recente do [REV Hardware Client](https://docs.stemos.com.br/books/rev-hardware-client-2). 3. Conecte o controlador do motor SPARK do motor de direção diretamente ao seu computador usando o cabo USB-C para USB-A incluso. 4. Selecione o SPARK de direção na lista de dispositivos conectados e acesse a guia Atualizar para verificar se o firmware está atualizado. 5. Certifique-se de que o SPARK de direção ainda esteja selecionado e, em seguida, acesse Encoder Absoluto na guia Utilitários. [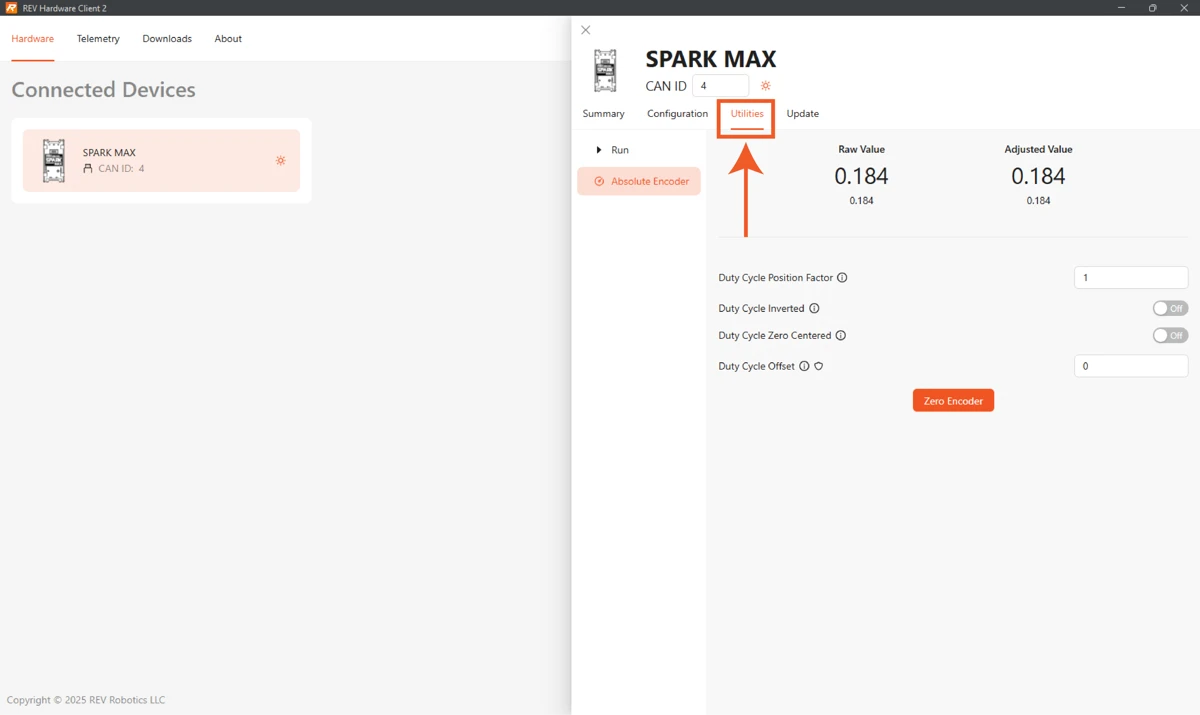](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image-1.webp) 6. Em seguida, siga os passos abaixo para o Módulo Swerve que você está calibrando para garantir que a posição zero esteja definida corretamente. ## Calibração do Easy Swerve 1. Insira uma chave hexagonal de 3 mm (1/8 pol.) no encaixe de calibração na parte superior do módulo EasySwerve. Você sentirá a chave hexagonal alcançar a engrenagem de azimute dentro da tampa superior. [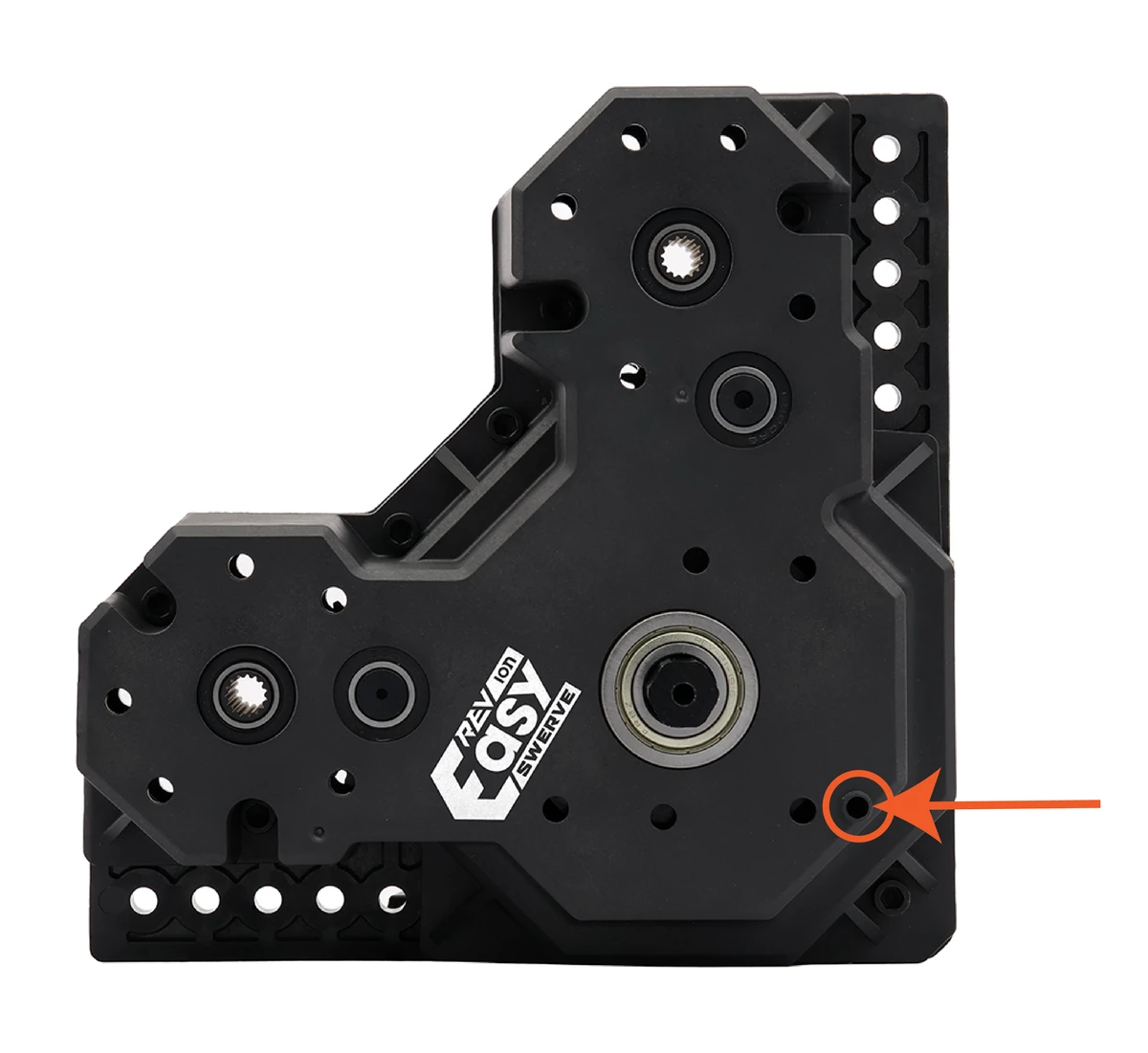](https://docs.stemos.com.br/uploads/images/gallery/2026-01/2.webp) 2. Gire a roda do módulo manualmente enquanto aplica uma leve pressão na chave hexagonal até que ela se encaixe no alojamento de alinhamento. A chave hexagonal avançará cerca de 6 mm (1/4 de polegada) no módulo de direção quando estiver alinhada. [](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image.gif) 3. Clique no botão Zero Encoder para calibrar a posição zero do encoder absoluto para esta posição. [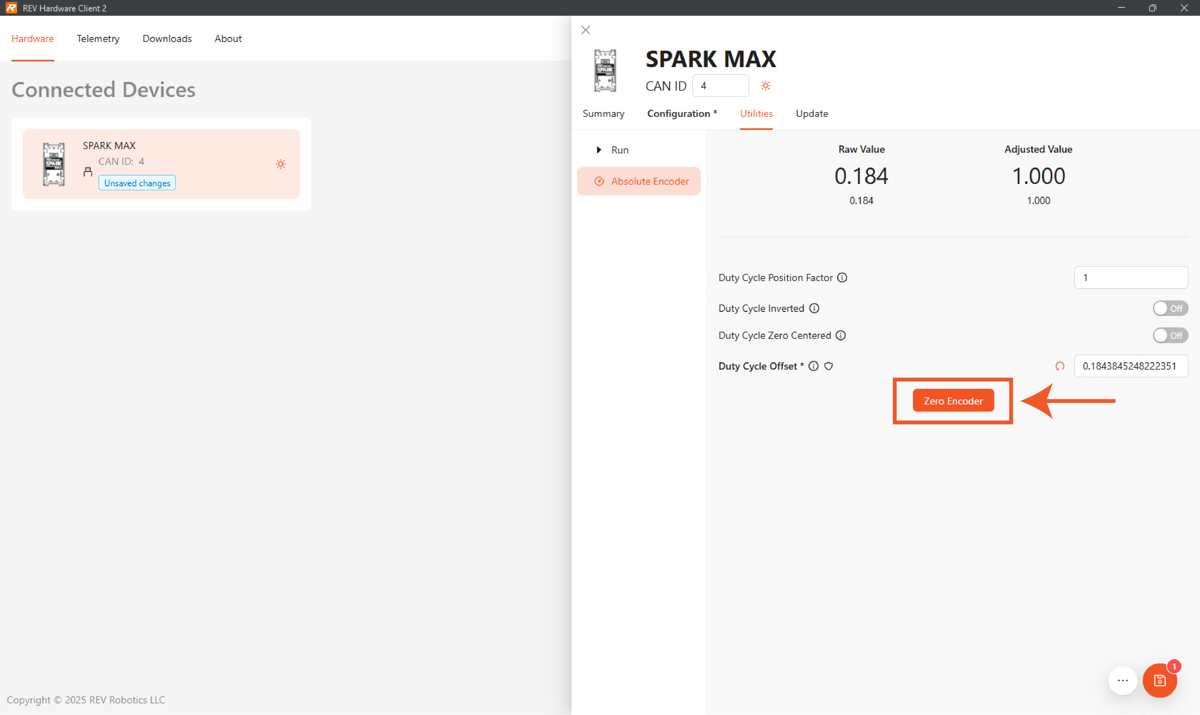](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image-1769797476094.png) ## MAXSwerve 1. Coloque a ferramenta de calibração no módulo MAXSwerve. - A ferramenta de calibração deve ser colocada no módulo MAXSwerve com a aba voltada para o módulo. - A roda MAXSwerve só encaixa em uma orientação devido à posição da engrenagem cônica. A ferramenta de calibração não é simétrica, portanto, você precisará alinhar a engrenagem cônica com o lado do recorte indicado pelo ponto laranja nesta imagem. - [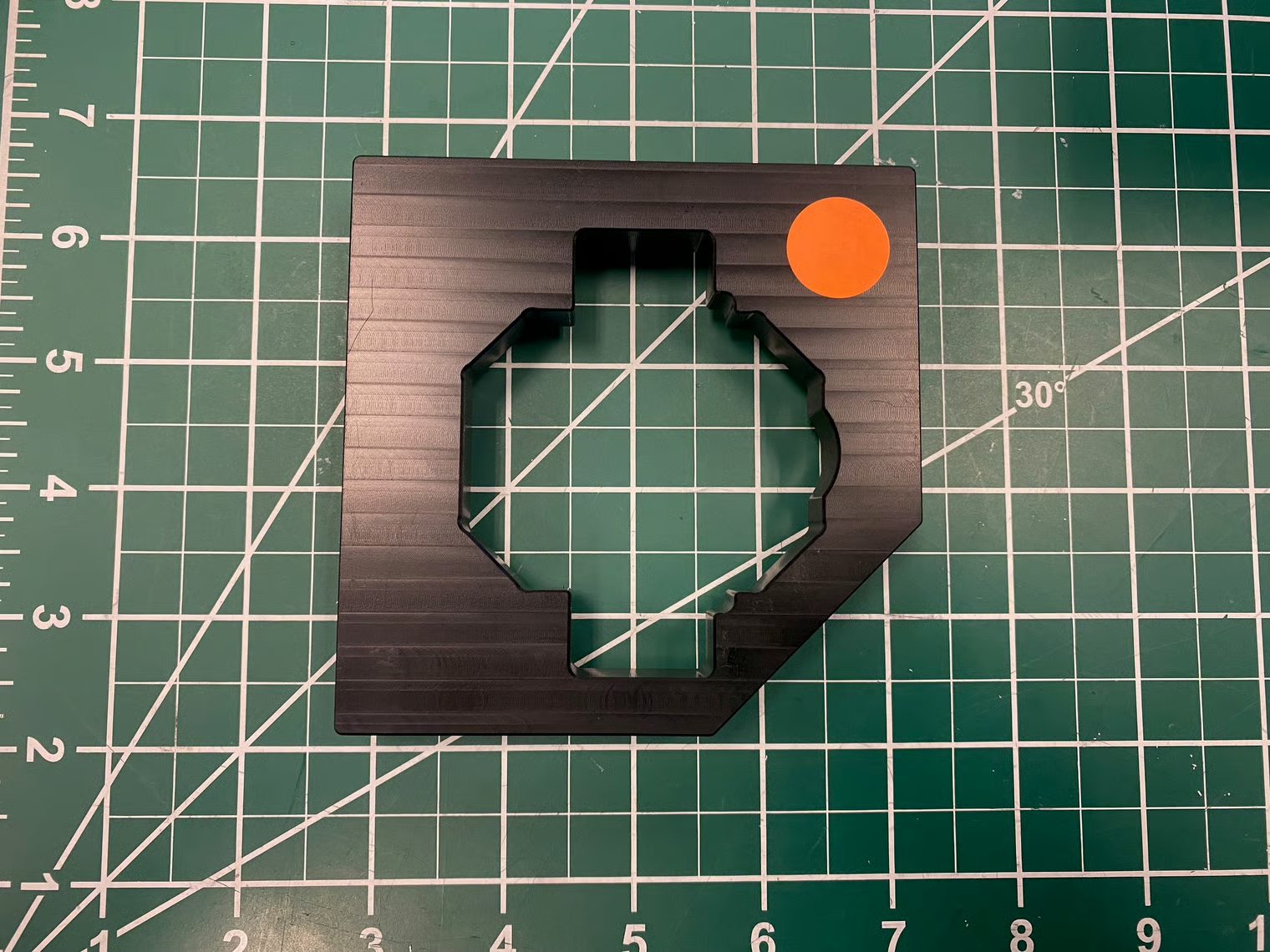](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image-1769797491673.png) 2. Gire a roda juntamente com a Ferramenta de Calibração até que a aba da ferramenta se encaixe firmemente ao redor das bordas do módulo MAXSwerve. Assim que isso acontecer, a roda e a Ferramenta de Calibração não poderão girar livremente até que a aba da ferramenta seja levantada acima das bordas do módulo. 3. Clique no botão Definir Offset Zero para calibrar a posição zero do codificador absoluto para esta posição. [](https://docs.stemos.com.br/uploads/images/gallery/2026-01/image-1769797476094.png)