Para prender a fita no terminal, utilizamos o lado do terminal que não tem bolinhas (entradas que vão ser utilizadas para os cabos).
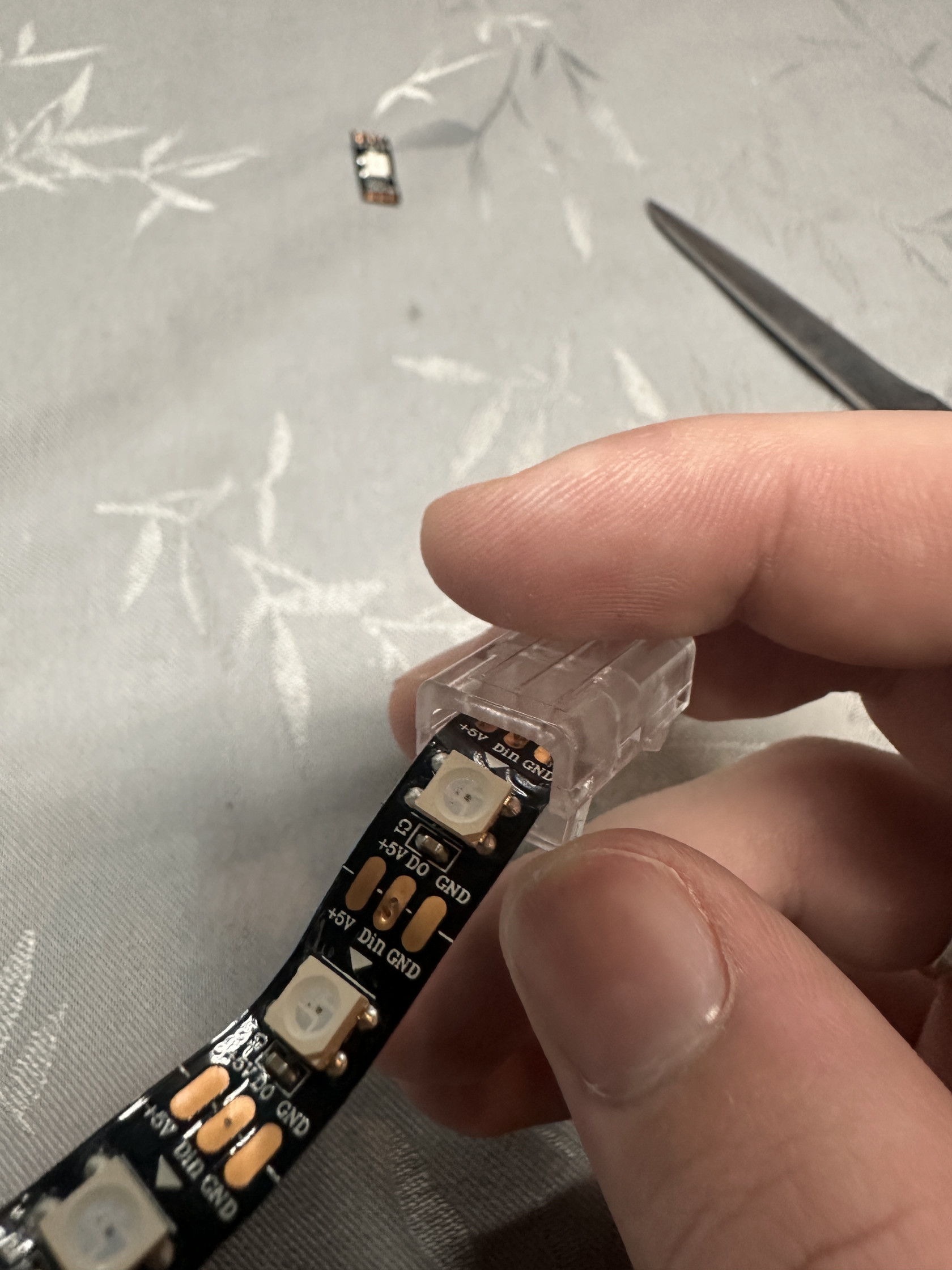 Quando posicionada corretamente, podemos pressionar a tampa do terminal até escutarmos um clique. #### Prendendo os cabos Para esse passo, devemos nos atentar na posição que os contatos foram presos, pois essa vai ser nossa referência para conectar os cabos na posição.O cabo de sinal (Cabo branco que coneta do RoboRIO) sempre vai ser conectado no meio
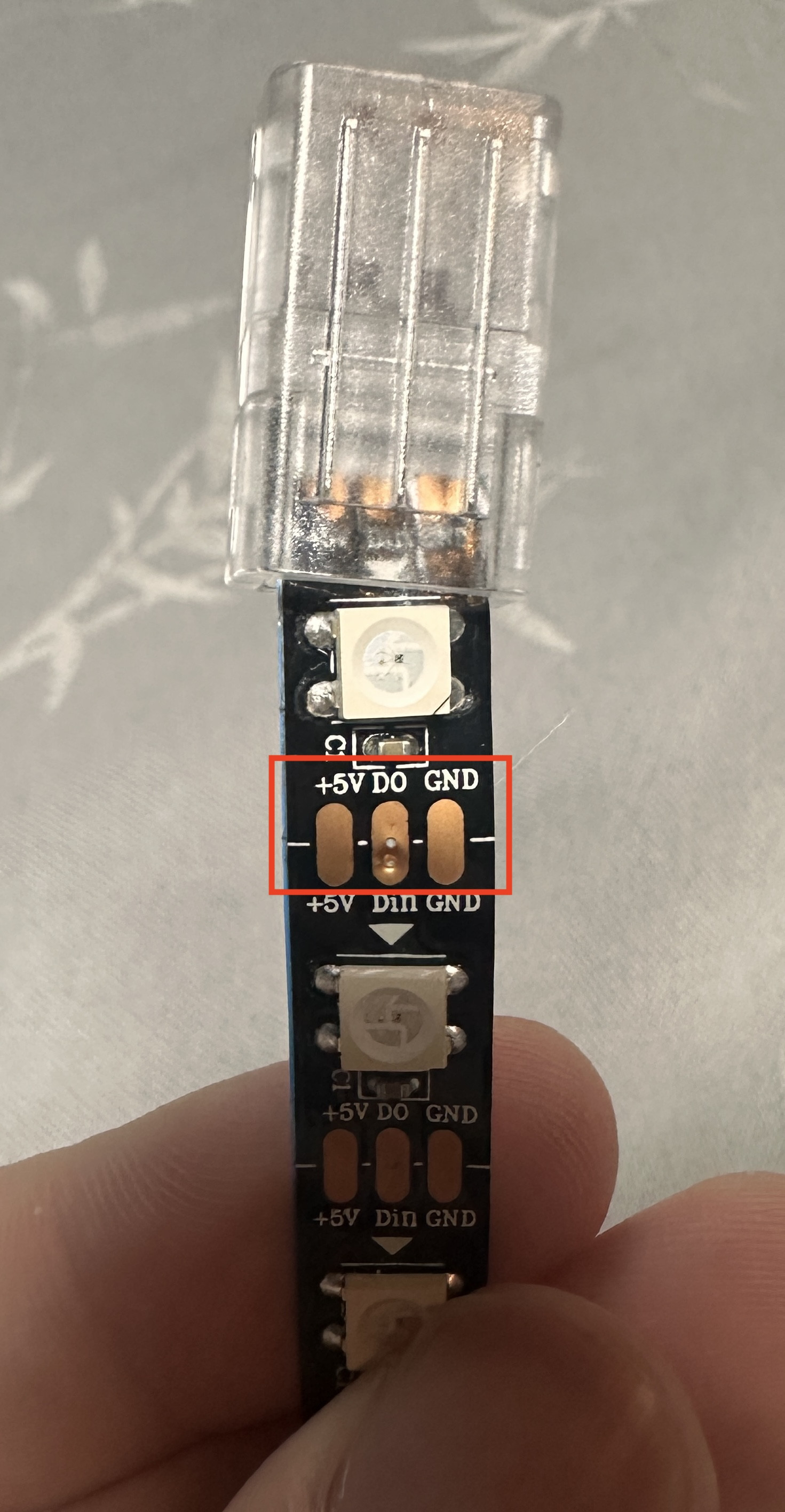 Então vamos colocar os cabos da seguinte maneira: - +5V - Cabo Vermelho - GND - Cabo Preto - DO - Cabo Branco Podemos posicionar os cabos **não desencapados** dentro dos respectivos buracos, depois de posicionados, podemos fazer o mesmo processo anterior de fechar a tampa do terminal. 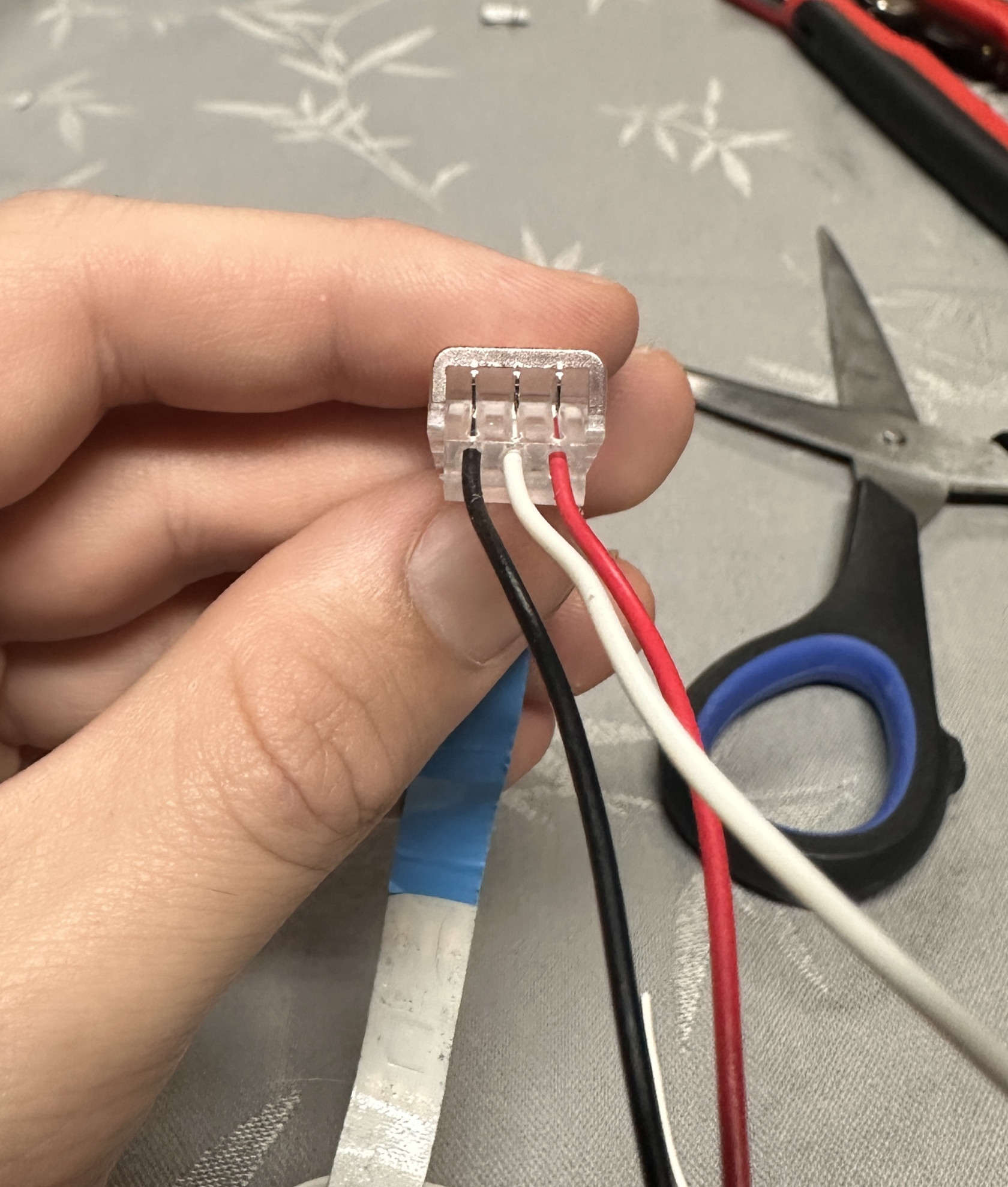 [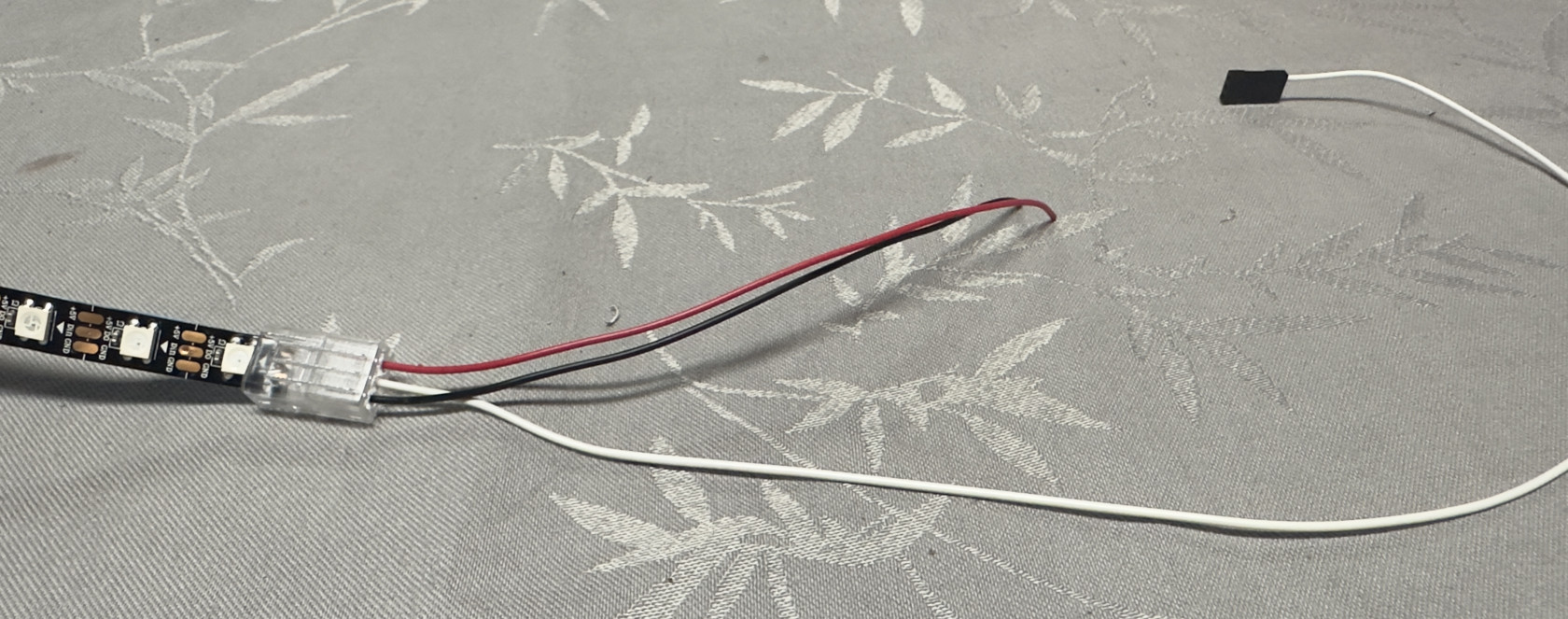](https://docs.stemos.com.br/uploads/images/gallery/2024-06/img-6672.jpg) #### Alimentação e conexão com RoboRIO O cabo vermelho e preto deve ser conectado na PDH em um dos canais de baixa corrente, porém também pode ser conectado na VRM em uma porta de 12V 2A. Já o cabo branco deve ser conectado no sinal de uma porta PWM do RoboRIO. ### Conectando mais fitas A biblioteca de fitas LED da WPILib apenas aceita 1 fica conectada no RoboRIO, por conta disso, para fazer extensões das fitas LED e colocá-las em lugares diferentes. Para isso nós utilizamos mais dois terminais e fazemos o mesmo processo para conectar uma fita na outra 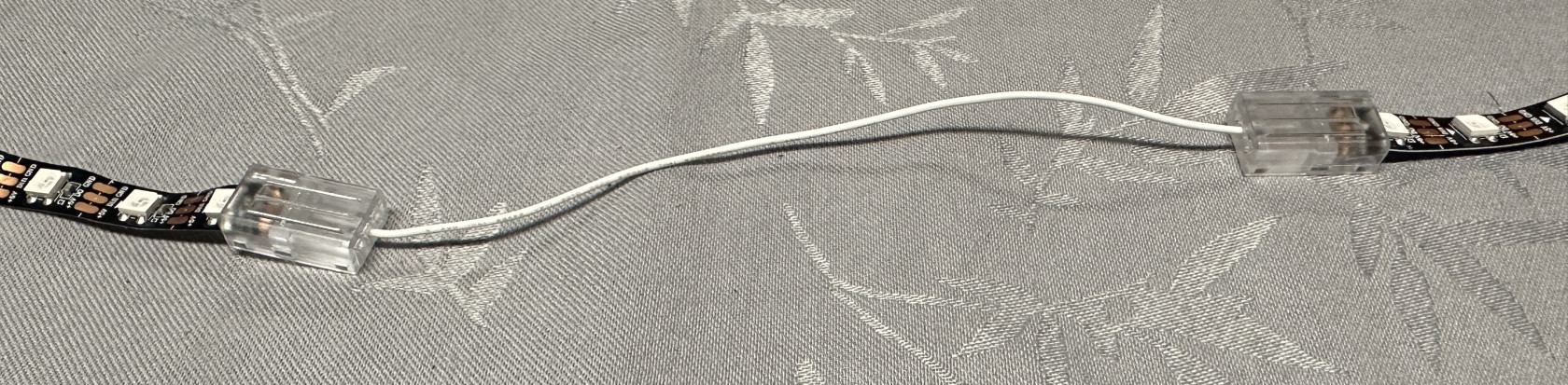 # Programando o Quick LEDs A WPILib possui uma API para controlar LEDs WS2812 e WS2811 com seu pino de dados conectado via PWM. ### Instanciando um objeto Adressable LED Primeiramente você deve criar um objeto `Addressable LED` que tem como argumento a porta PWM que está conectado. Deve ser uma porta PWM no roboRIO. Em seguida, você define o número de LEDs (pixels) localizados em sua faixa de LEDs, o que pode ser feito com a função setLength().É importante saber que definir o comprimento da fita LED é uma tarefa cara e não é recomendado executá-la periodicamente.
Depois que o comprimento da fita for definido, você terá que criar um objeto `AddressableLEDBuffer` que recebe o número de LEDs como entrada. Em seguida, você chamará `myAddressableLed.setData(myAddressableLEDBuffer)` para definir os dados de saída do led. Então, você pode chamar `myAddressableLed.start()` para gravar a saída continuamente. Abaixo está um exemplo completo do processo de inicialização. ``` @Override public void robotInit() { // porta PWM 9 // deve ser um cabeçalho PWM , não MXP ou DIO m_led = new AddressableLED(9); // Reutiliza o buffer // Padrão para uma fita de 60 pixeis // Definir o comprimento da fita é uma função cara no código, então faça apenas uma vez m_ledBuffer = new AddressableLEDBuffer(60); m_led.setLength(m_ledBuffer.getLength()); // Define os dados m_led.setData(m_ledBuffer); m_led.start(); } ```O roboRIO suporta apenas 1 objeto AddressableLED. Como os LEDs WS2812B são conectados em série, você pode acionar várias faixas conectadas em série a partir do objeto AddressableLED.
### Configurando toda a fita para uma cor A cor pode ser definida para um LED individual da fita usando dois métodos. `setRGB()` que aceita valores RGB como entrada e `setHSV()` que aceita valores HSV como entrada. #### Utilizando valores RGB RGB significa Vermelho, Verde e Azul. Este é um modelo de cores bastante comum, pois é bastante fácil de entender. Os LEDs podem ser configurados com o método `setRGB` que leva 4 argumentos: índice do LED, quantidade de vermelho, quantidade de verde, quantidade de azul. A quantidade de Vermelho, Verde e Azul são valores inteiros entre 0-255. ``` for (var i = 0; i < m_ledBuffer.getLength(); i++) { // Define os LEDs específicos para a cor vermelha em RGB m_ledBuffer.setRGB(i, 255, 0, 0); } m_led.setData(m_ledBuffer); ``` #### Utilizando valores HSV HSV significa Matiz, Saturação e Valor. Matiz descreve a cor ou matiz, sendo a saturação a quantidade de cinza e o valor o brilho. Na WPILib, Matiz é um número inteiro de 0 a 180. Saturação e Valor são números inteiros de 0 a 255. Se você olhar para um seletor de cores como o do [Google](https://www.google.com/search?q=color+picker), Matiz será de 0 a 360 e Saturação e Valor serão de 0% a 100%. É da mesma forma que o OpenCV lida com cores HSV. Certifique-se de que os valores HSV inseridos no WPILib estejam corretos, ou a cor produzida pode não ser a mesma esperada. [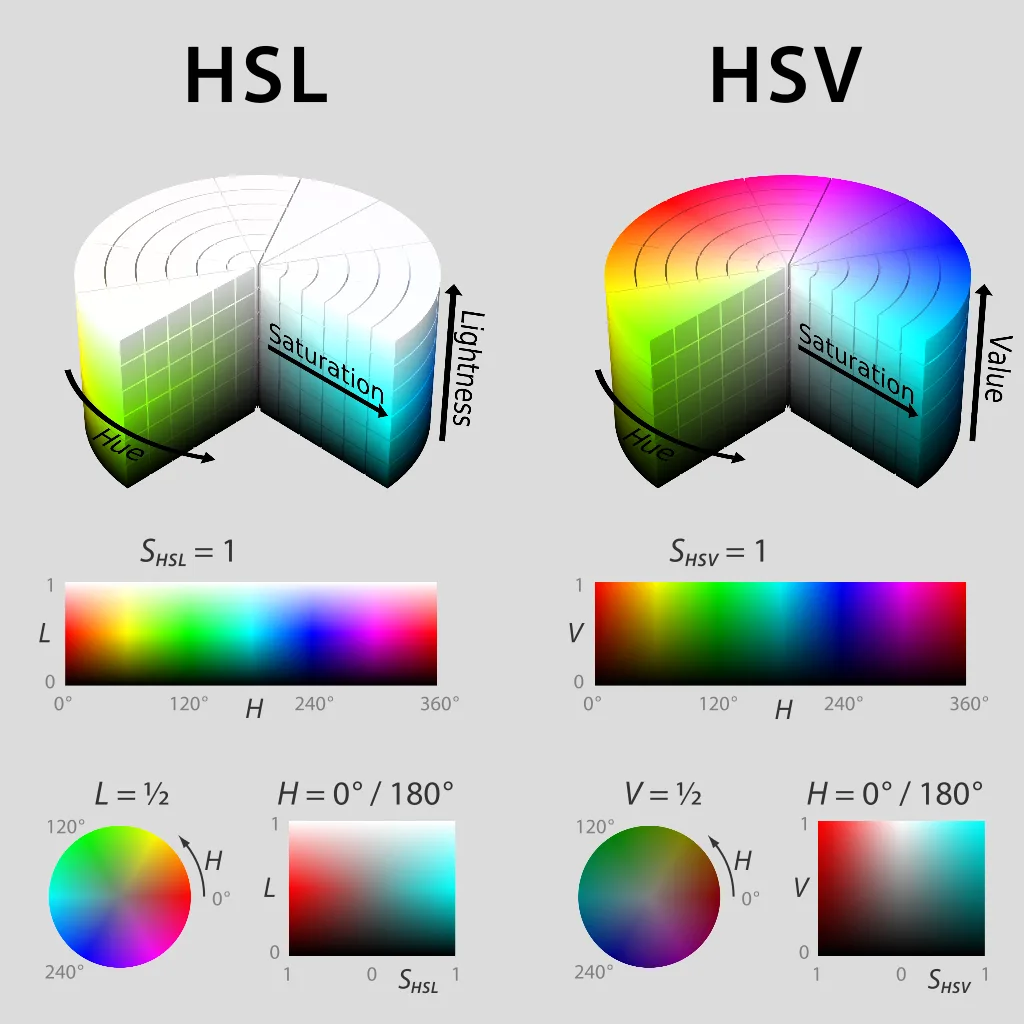](https://docs.stemos.com.br/uploads/images/gallery/2024-01/hsv-models.webp) Os LEDs podem ser configurados com o método `setHSV` que leva 4 argumentos: índice do LED, matiz, saturação e valor. Um exemplo é mostrado abaixo para definir a cor de uma faixa de LED para vermelho (matiz 0). ``` for (var i = 0; i < m_ledBuffer.getLength(); i++) { // Define os LEDs específicos para a cor vermelha em HSV m_ledBuffer.setHSV(i, 0, 100, 100); } m_led.setData(m_ledBuffer); ``` ### Criando um efeito arco-íris O método abaixo faz algumas coisas importantes. Dentro do loop for, ele distribui igualmente o matiz por todo o comprimento do fio e armazena o matiz individual do LED em uma variável chamada matiz. Em seguida, o loop for define o valor HSV desse pixel especificado usando o valor de matiz. Movendo-se para fora do loop for, o `m_rainbowFirstPixelHue` itera o pixel que contém o matiz “inicial”, criando o efeito arco-íris. `m_rainbowFirstPixelHue` então verifica se o matiz está dentro dos limites de matiz de 180. Isso ocorre porque o matiz HSV é um valor de 0 a 180. ``` private void rainbow() { // Para cada pixel for (var i = 0; i < m_ledBuffer.getLength(); i++) { // Calcule o hue - hue é melhor para arco iris por conta do // formato de cor ser um circulo então apenas uma variável é mudada // para processar final var hue = (m_rainbowFirstPixelHue + (i * 180 / m_ledBuffer.getLength())) % 180; // Define o valor m_ledBuffer.setHSV(i, hue, 255, 128); } // Aumenta o hue para fazer o arco iris "se mover" m_rainbowFirstPixelHue += 3; // Check bounds m_rainbowFirstPixelHue %= 180; } ```