

Não tente operar o NEO enquanto um parafuso ainda estiver preso na parte traseira do motor. Não remover o parafuso danificará o motor e/ou eixo.
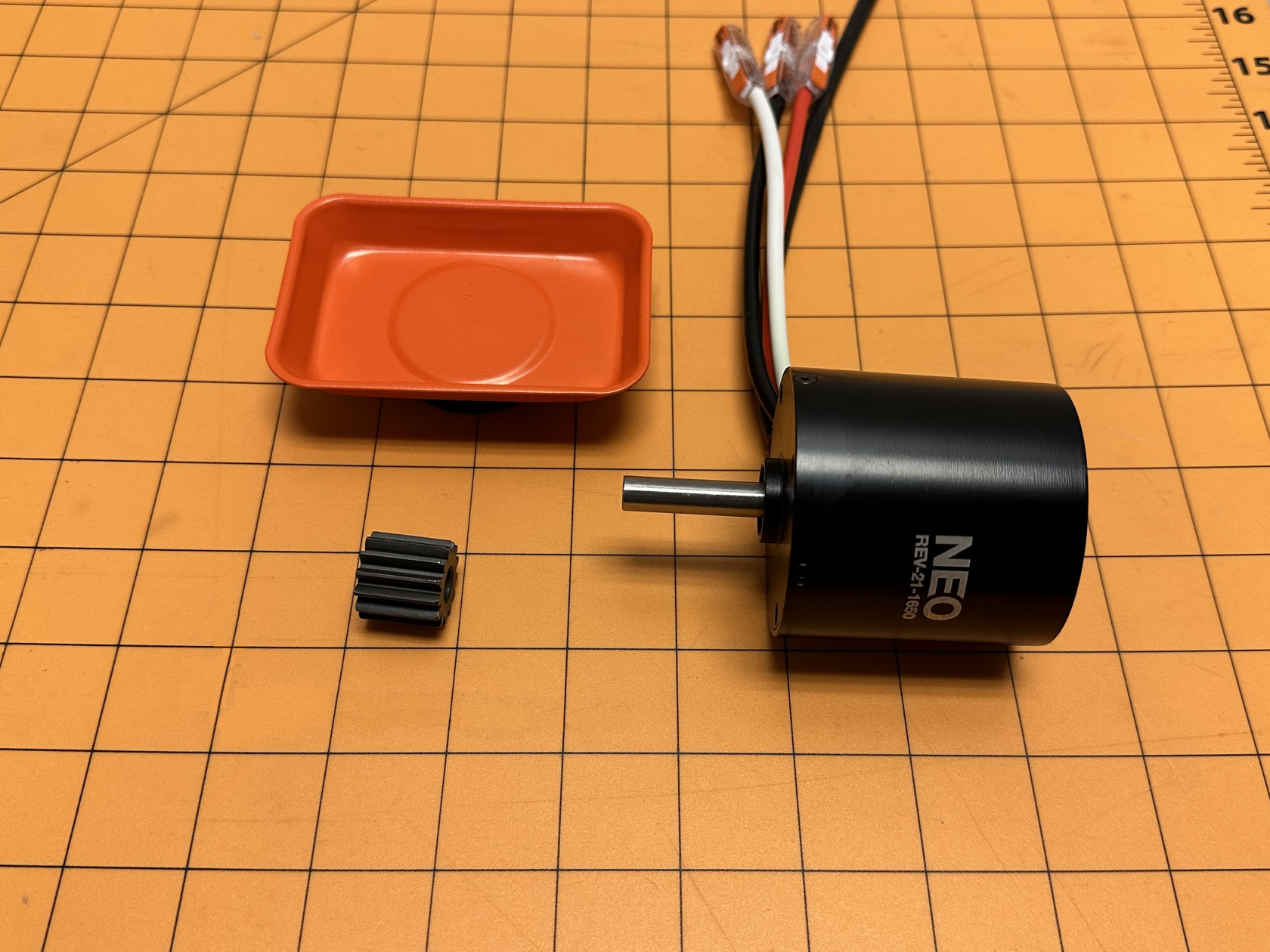
# NEO Vortex Brushless Motor # Descrição O motor NEO Vortex sem escova é um motor com sensor de alta potência, alto desempenho e alta resolução compatível com o sistema REV ION. Ele possui uma interface de controlador acoplável que pode ser montada diretamente no SPARK Flex ou em um adaptador independente que permite o controle de qualquer controlador de motor sem escova como o SPARK MAX. Seu rotor passante é o coração de seu exclusivo sistema de eixo intercambiável, facilitando a integração com vários mecanismos. # Recursos - Encoder de alta resolução - Parâmetros de motor e memória de calibração integrados - Furo sextavado com cone para vários eixos de troca rápida - Sem fios de motor – conexões de acoplamento confiáveis e robustas para fases do motor e sensores - Sensor duplo, sensor de temperatura da bobina por contato direto - 560KV (RPM por volt) - 640 Watts (375 a 40A) # Especificações ##### Especificações do Motor† - Tensão nominal de operação: 12 V - Motor Kv: 550 Kv - Velocidade Livre: 6784 RPM - Corrente de funcionamento livre: 3,6 A - Corrente de _stall_: 211 A - Torque de _stall_: 3,6 Nm - Potência máxima de saída: 640 W - Potência de típica de saída a 40 A: 375 W - Pares de pólos: 7 - Resolução do codificador com SPARK MAX: 42 contagens por rotação - Resolução do codificador com SPARK Flex††: 7.168 contagens por rotação ##### Especificações Mecânicas - Comprimento do corpo encaixado‡: 79,7 mm - Largura da Lateral Estreita da Montagem Ancorada: 50,8mm (2") - Diâmetro da Lateral Arredondada da Montagem Ancorada: 60 mm - Profundidade da Haste Deslocada: 19,7 mm - Hardware de acoplamento‡‡: Parafuso de cabeça cilíndrica M3 x 25 mm - Diâmetro do rotor: 50mm - Furo do rotor: 12,7mm (1/2") hexagonal com cone de meio ângulo de 7,5° - Diâmetro do contra-furo da retenção do eixo: 17,75 mm - Profundidade do contra-furo da retenção do eixo: 4 mm - Peso: 444,5 g (0,98 libras) > **Observações:** > > † Testes de motor de pré-produção. Serão feitas atualizações com dados do motor de produção, se necessário. > > †† A atualização do firmware será necessária para acessar dados do Encoder de resolução mais alta > > ‡ Quando acoplado ao adaptador SPARK Flex ou Vortex Solo > > ‡‡ Hardware de acoplamento incluído com o adaptador SPARK Flex ou Vortex Solo # NEO 2.0 Brushless Motor # Descrição O motor NEO 2.0 Brushless baseia-se no desempenho comprovado do NEO original, oferecendo a mesma potência brushless de alta eficiência em um pacote refinado, projetado para facilitar a integração e a montagem. Com atualizações em seu eixo, conexão do encoder e perfil geral, o NEO 2.0 oferece às equipes mais flexibilidade e montagem simplificada, mantendo total compatibilidade com os componentes existentes do ecossistema REV ION. Aprovado pela FRC a partir da temporada de 2026, o NEO 2.0 continua a fornecer a potência, a eficiência e a durabilidade em que as equipes confiam — agora com um formato mais compacto e recursos que facilitam a manutenção, tornando seu uso mais fácil do que nunca em aplicações avançadas de robótica. # Caracteristicas - Motor CC sem escovas de alto desempenho projetado para robótica competitiva - Compatível com todos os controladores de motor SPARK - Encoder "hall-effect" totalmente integrado para controle em malha fechada - Adota o padrão de montagem SPARK Flex para compatibilidade direta com o MAXPlanetary e o ecossistema REV em geral, -alinhando as superfícies planas para um encaixe discreto - Substituição direta para motores do tipo CIM - Rolamentos de esferas dianteiros e traseiros - Ímãs de neodímio de alta temperatura - Sensor de temperatura do motor - Saída do sensor do motor com conector para uso com o cabo de sensor NEO 2.0 - Ímã magnetizado diametralmente na extremidade do rotor do eixo para suportar o encoder magnético # Especificações - Tensão nominal: 12 V - Kv do motor: 473 Kv - Velocidade livre: 5676 RPM - Corrente de stall teórica: 150 A - Torque de stall teórico: 3,75 Nm - Pico de potência de saída teórica: 540 W - Eixo de saída: Eixo spline de 15 dentes - Comprimento do sixo de saída: 31,5 mm (1,24 pol.) - Piloto de saída: 19,05 mm (0,75 pol.) - Comprimento do corpo: 48 mm (1,89 pol.) - Diâmetro do corpo: - Máximo: 60 mm (2,36 pol.) - Mínimo: 50,8 mm (2 pol.) - Largura mínima da face de montagem: 2 pol. - Furos de montagem: Rosqueados #10-32 - Profundidade dos furo de montagem: 9,5 mm (0,375 pol.) - Parafusos de Montagem da blindagem: M3 - Blindagem orofundidade máxima do parafuso de montagem: 2 mm - Fios de fase do motor - Comprimento: 150 mm (5,91 pol.) - 12 AWG - Peso: 364 g (0,8 lb)