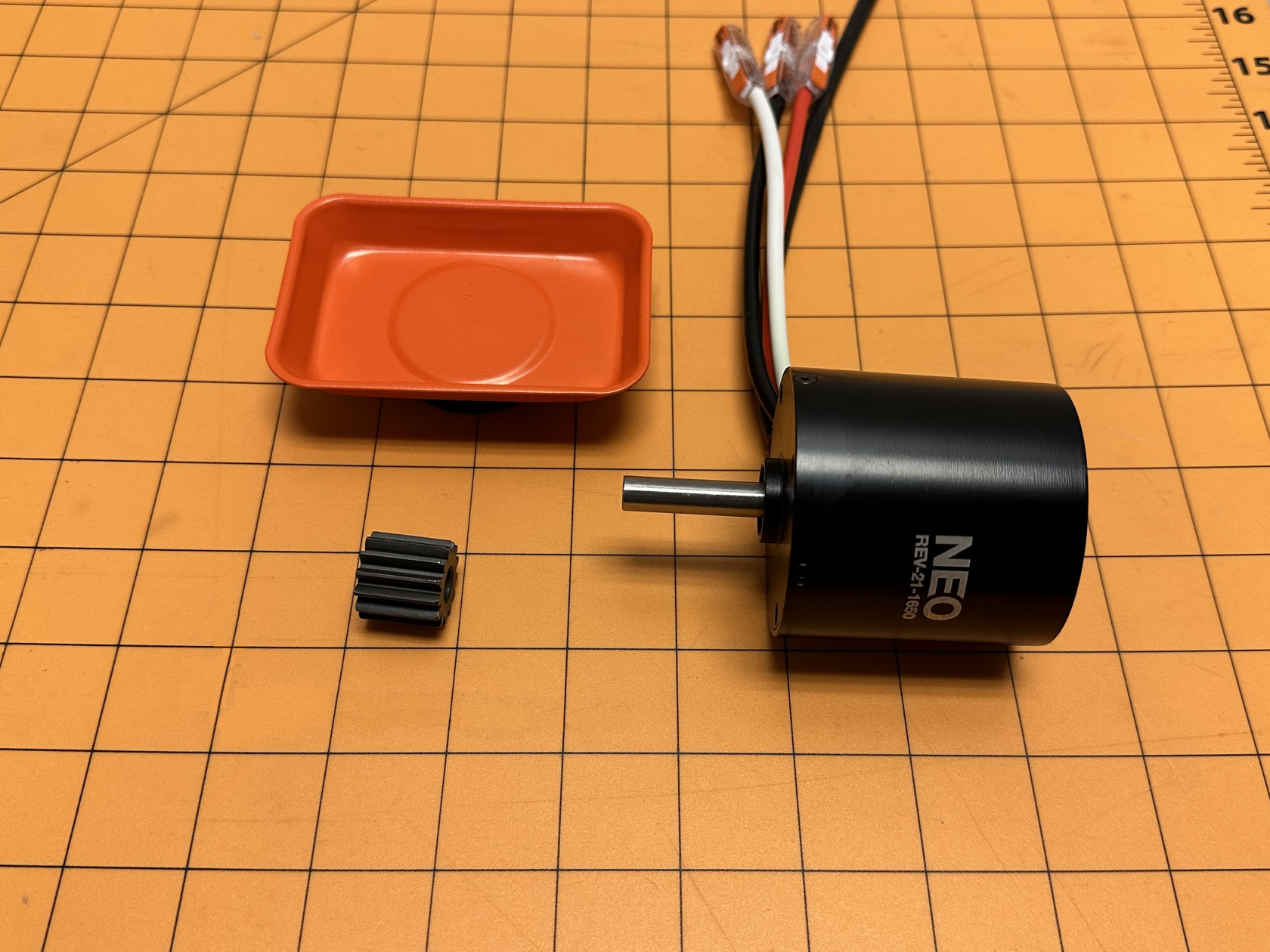
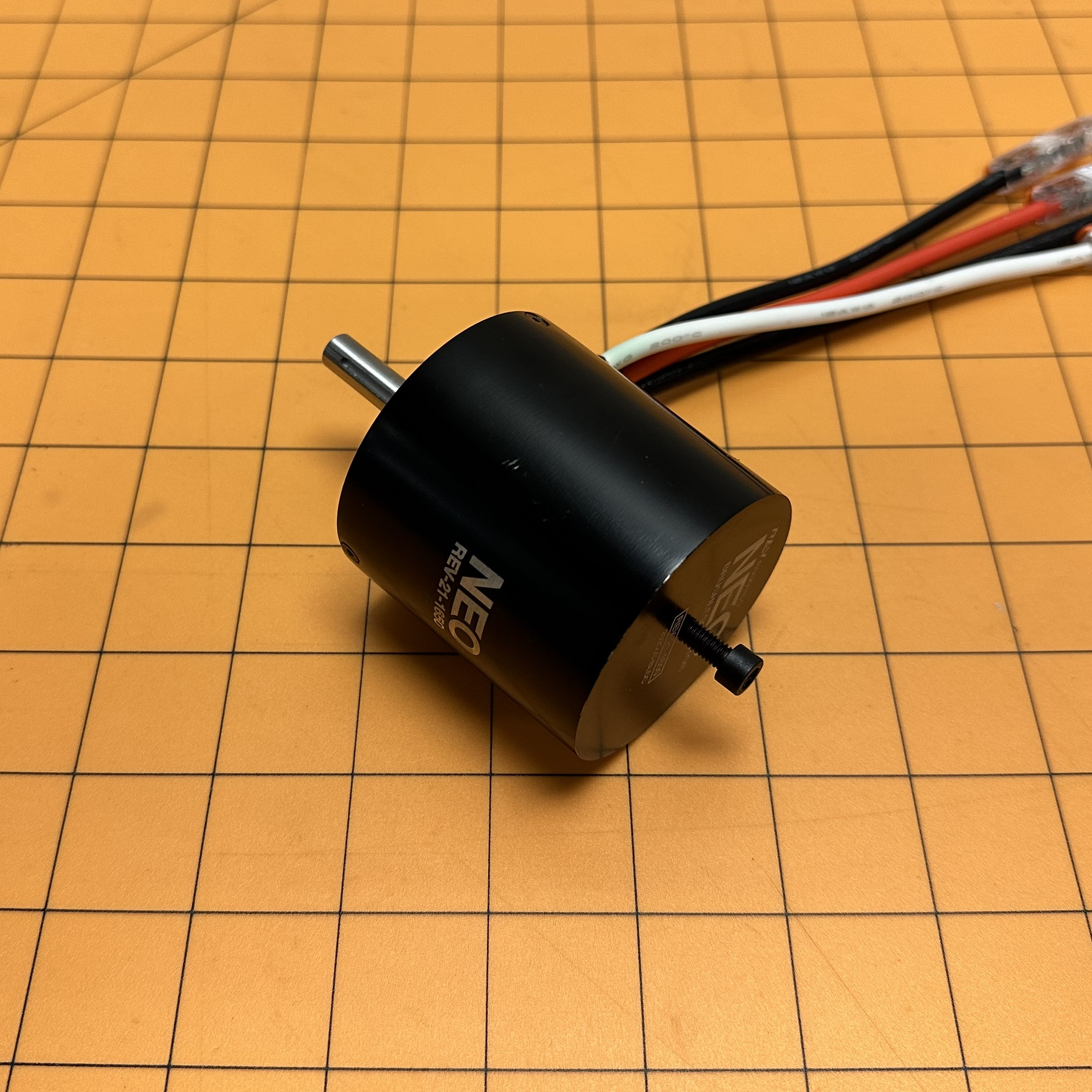
1) Pegue um parafuso #10-32 x 3/8" de comprimento de cabeça cilindrica e insira na parte de trás do motor. **Aperte-o com os dedos** A intenção do parafuso é apenas de apoiar o eixo na prensa, apertar esse parafuso pode danificar o motor e/ou o eixo.
2) Usando uma prensa mecânica, firme o motor com o parafuso encostando na base da prensa.

3) Prossiga com a prensagem do pinhão como usual. Quando finalizar o processo, remova o parafuso na traseira do motor.

Não tente operar o NEO enquanto um parafuso ainda estiver preso na parte traseira do motor. Não remover o parafuso danificará o motor e/ou eixo.