A saliência é o caminho que os fios do estator do motor interno passam pela parte traseira do motor. Esse recurso foi adicionado para permitir espaço suficiente para que os fios não entrem em contato com o rotor do motor.
#### **Comprimento** O comprimento do Kraken X60 varia conforme a versão. | Número da Peça | Descrição | Valor | | --- | --- | --- | |WCP-0940 | Kraken X60 + Talon FX | 75mm / 2.96" #### **Peso** O peso do Kraken X60 varia conforme a versão. | Número da Peça | Descrição | Valor | | --- | --- | --- | |WCP-0940 | Kraken X60 + Talon FX | 1.2 Lbs / ~544g #### **Furos de montagem** O Kraken X60 possui 11 furos de montagem #10-32 em um círculo de parafusos de 2 polegadas, espaçados a 30 graus. A razão para os furos de montagem adicionais é permitir que o Kraken seja montado no padrão de montagem CIM tradicional de 2 furos, bem como em aplicações que utilizam os padrões de 6 e 8 furos do Falcon e do NEO. [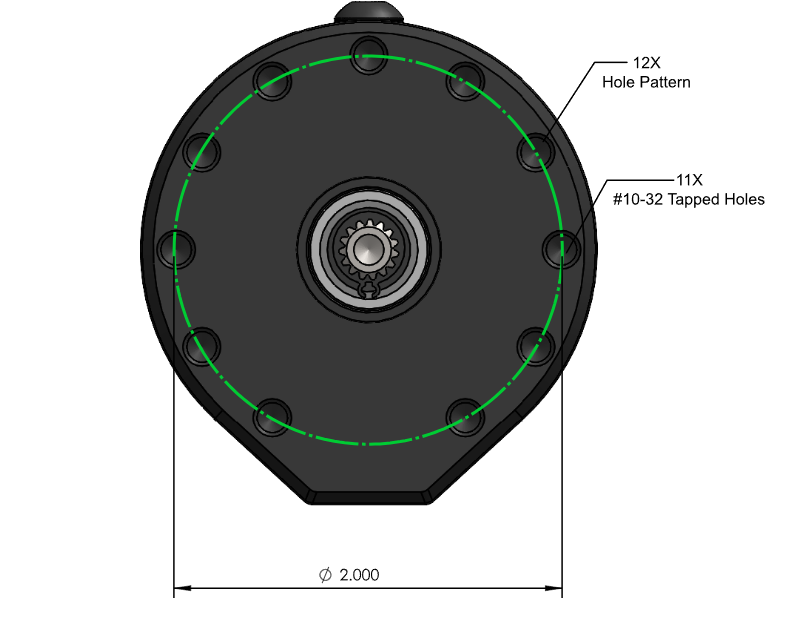](https://docs.stemos.com.br/uploads/images/gallery/2026-03/captura-de-tela-2026-03-20-110501.png) #### **Furos Cegos** Cada furo de montagem é cego, ou seja, não atravessa a placa de montagem. Ao usar furos de montagem cegos, as equipes não podem travar o rotor interno do motor usando um parafuso muito comprido. [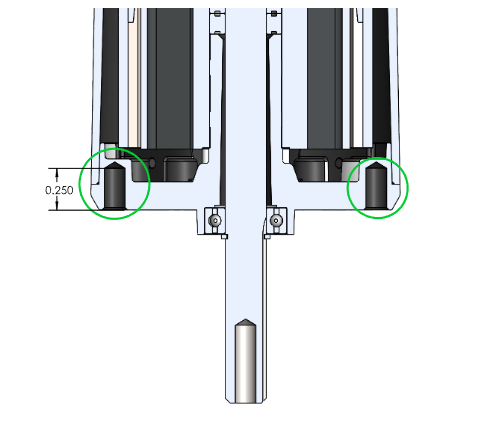](https://docs.stemos.com.br/uploads/images/gallery/2026-03/captura-de-tela-2026-03-20-110858.png) #### **Ressalto de centralização (Pilot Boss)** O Kraken X60 também possui o mesmo ressalto de centralização de 3/4" de diâmetro que o CIM/MiniCIM/NEO/Falcon. [](https://docs.stemos.com.br/uploads/images/gallery/2026-03/captura-de-tela-2026-03-20-111404.png) # Performance do Motor #### **Parâmetros de Desempenho do Motor** ##### **Comunicação trapezoidal** | Parametro | Valor | Unidade | | --- | --- | --- | |Velocidade livre | 6000 | RPM | |Corrente livre | 2 | A | |Torque *stall* | 7.09 | Nm | |Corrente *stall* | 366 | A | |Potência máxima | 1108 | W | |Eficiência máxima | 87% | Com / Sem | |Corrente @ Eficiência Máxima | 30 | A | |Potência @ 40A | 413 (86.1%)| W (%Eff) | |Potência @ 30A| 313 (87.1%) | W (%Eff) | |Potência @ 20A | 207 (86%) | W (%Eff) | |Potência @ 10A | 94 (78%) | W (%Eff) | [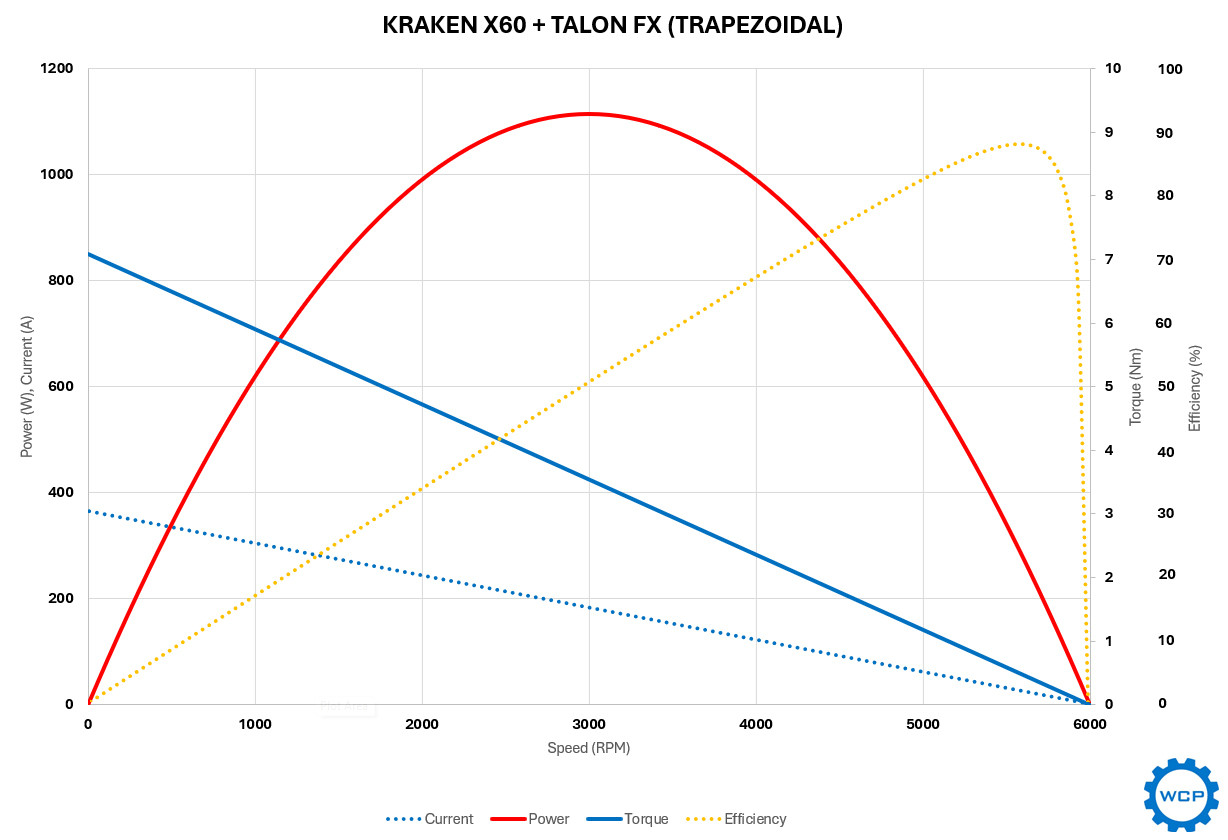](https://docs.stemos.com.br/uploads/images/gallery/2026-03/image.jpg) ##### ***Field Oriented Control (FOC)*** | Parametro | Valor | Unidade | | --- | --- | --- | |Velocidade livre | 5,800 | RPM | |Corrente livre | 2 | A | |Torque *stall* | 9.37 | Nm | |Corrente *stall* | 483 | A | |Potência máxima | 1405 | W | |Eficiência máxima | 85.4% | Com / Sem | |Corrente @ Eficiência Máxima | 37 | A | |Potência @ 40A | 409 (85.3%)| W (%Eff) | |Potência @ 30A| 307 (85.3%) | W (%Eff) | |Potência @ 20A | 199 (83.2%) | W (%Eff) | |Potência @ 10A | 87 (72.5%) | W (%Eff) | [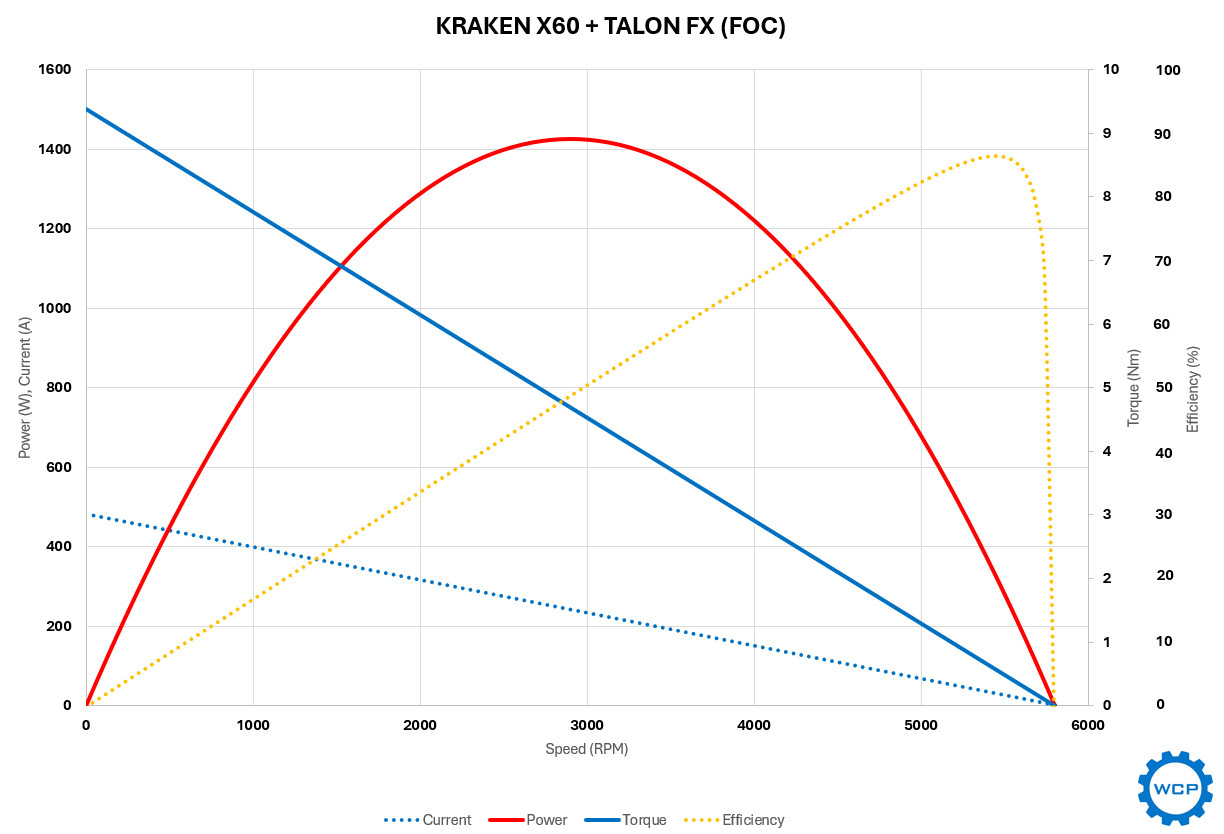](https://docs.stemos.com.br/uploads/images/gallery/2026-03/image-1.jpg) ##### **Uma nota sobre potência máxima** Para total transparência, as equipes não poderão usar toda a potência máxima do Kraken em um robô da FRC. Isso ocorre porque cada motor é limitado por um disjuntor de 40A, e o motor precisa de mais de quatro vezes essa corrente para produzir a potência máxima do Kraken. No entanto, uma potência máxima maior ainda é importante no contexto de um robô da FRC por dois motivos principais: Os disjuntores usados na FRC são disjuntores térmicos e não desarmam exatamente na sua corrente nominal. É comum que alguns disjuntores permitam correntes bem acima da sua classificação por breves períodos (menos de um segundo). Isso significa que uma potência máxima maior pode ter um impacto na aceleração. Com uma aceleração mais rápida, o motor pode atingir a velocidade máxima mais rapidamente ao arrancar do zero ou ao mudar de direção. Ao apresentar uma potência de pico mais alta, o Kraken consegue operar em um ponto mais estratégico da curva de potência durante uma partida da FRC. Isso permite que o motor funcione com maior eficiência, o que significa que menos energia elétrica é convertida em calor, permitindo que ele funcione por mais tempo antes de sofrer danos permanentes nos enrolamentos. # Kraken X44 # Especificações Físicas O Kraken X44 foi projetado para ser uma substituição direta (drop-in) de menor potência para o Kraken X60. Isso significa menor peso, menor potência, mas com rotações (RPM) semelhantes. 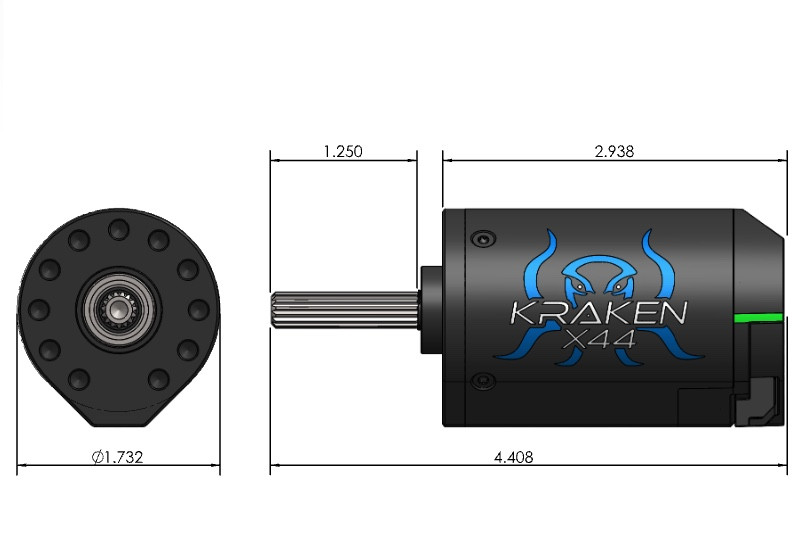 #### **Diâmetro** | Descrição | Valores | --- | --- | |Diâmetro | 44mm / 1.73in |Diâmetro efetivo com saliênci | 47.4mm / 1.866inA saliência é o caminho que os fios do estator do motor interno passam pela parte traseira do motor. Esse recurso foi adicionado para permitir espaço suficiente para que os fios não entrem em contato com o rotor do motor.
#### **Comprimento** O comprimento do Kraken X44 depende da sua versão | Número da peça | Descrição | Valores | | --- | --- | --- | |WCP-0941| Kraken X44 + Talon FX | 75mm / 2.96" #### **Peso** O peso do Kraken X44 depende da sua versão | Número da peça | Descrição | Valores | | --- | --- | --- | |WCP-0941| Kraken X44 + Talon FX | 0.75 lbs / ˜340g #### **Furos de montagem** O Kraken X44 possui (11x) furos de montagem #10-32 em um círculo de parafusos de 1,375”, espaçados a cada 30 graus. 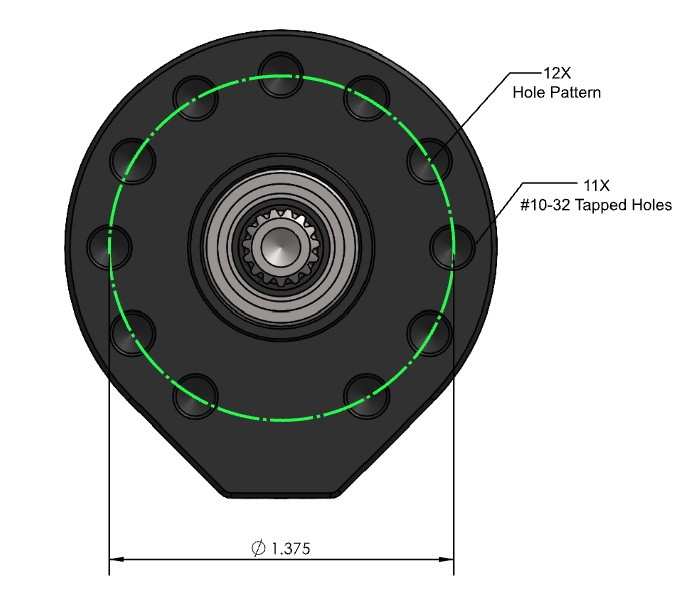 #### **Furos cegos** Cada furo de montagem é cego, ou seja, não atravessa completamente a placa de montagem. Ao utilizar furos cegos, evita-se que as equipes travem o rotor interno do motor ao usar parafusos excessivamente longos.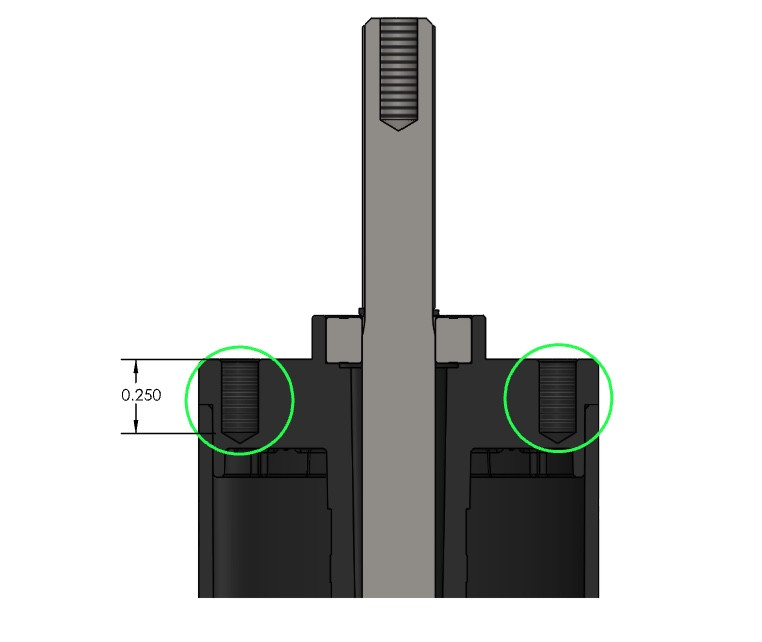 #### **Ressalto de Centralização (Pilot Boss)** O Kraken X44 também possui o mesmo ressalto de centralização (pilot boss) de 3/4” de diâmetro presente nos motores Kraken X60, CIM, MiniCIM, NEO e Falcon.  # Descrição O Kraken X44 é um motor brushless desenvolvido pela WestCoast Products, projetado para suportar as exigências rigorosas de FIRST Robotics Competition. O Kraken X44 foi projetado para ser fácil de integrar nos projetos das equipes e possui uma série de características que o diferenciam de outros motores brushless no mercado da FRC, incluindo: • Controlador TalonFX integrado • Eixo padrão SplineXS • Eixo de saída não substituível • Opções de montagem versáteis • Design mecânico robusto # Desempenho do Motor #### **Parâmetros de Desempenho do Motor** ##### **Comunicação Trapezoidal** | Parâmetro | Valor | Unidade | | --- | --- | --- | |Velocidade Livre| 7758 | RPM |Corrente Livre| 3 | A |Torque *Stall*| 4.11 | Nm |Corrente *Stall*| 279 | A |Potência Máxima| 835 | W |Eficiência Máxima| 81% | Sem/Com |Potência @ 41A| 6700 | W |KT| 14.91 | mNm/A ##### **Comunicação com Controle Orientado a Campo (FOC – Field Oriented Control)** | Parâmetro | Valor | Unidade | | --- | --- | --- | |Velocidade Livre| 7368 | RPM |Corrente Livre| 3 | A |Torque *Stall*| 5.01 | Nm |Corrente *Stall*| 329 | A |Potência Máxima| 966 | W |Eficiência Máxima| 81% | Sem/Com |Potência @ 41A| 6500| W |KT| 15.37 | mNm/A #### **Observação sobre a Potência Máxima** Referir-se à potência máxima do Kraken X44 não é uma tentativa de enganar ou induzir os clientes ao erro. É uma prática comum descrever motores com base em sua potência máxima, e é por isso que a WCP se refere ao Kraken X44 dessa forma. Sendo totalmente transparente, as equipes não conseguirão utilizar toda a potência máxima do Kraken em um robô da FRC. Isso ocorre porque cada motor é limitado por um disjuntor de 40A, enquanto o motor precisa de mais de 4 vezes essa corrente para atingir sua potência máxima. Ainda assim, uma potência máxima mais alta continua sendo importante no contexto de um robô da FRC por dois principais motivos: • Os disjuntores usados na FRC são térmicos e não desarmam exatamente na corrente nominal. É comum que permitam correntes bem acima do valor nominal por curtos períodos (menos de um segundo). Isso significa que uma maior potência de pico pode impactar diretamente na aceleração. Com maior aceleração, o motor atinge sua velocidade mais rapidamente ao sair do repouso ou ao mudar de direção. • Com maior potência máxima, o Kraken pode operar em uma região mais favorável da curva de potência durante uma partida de FRC. Isso permite que o motor funcione de forma mais eficiente, ou seja, menos energia elétrica é convertida em calor, possibilitando operar por mais tempo antes de causar danos permanentes aos enrolamentos. # Eixo SplineXS O eixo de saída dos motores Kraken é o novo padrão SplineXS. O eixo SplineXS foi desenvolvido para aprimorar os eixos de saída de outros motores presentes no mercado da FRC. 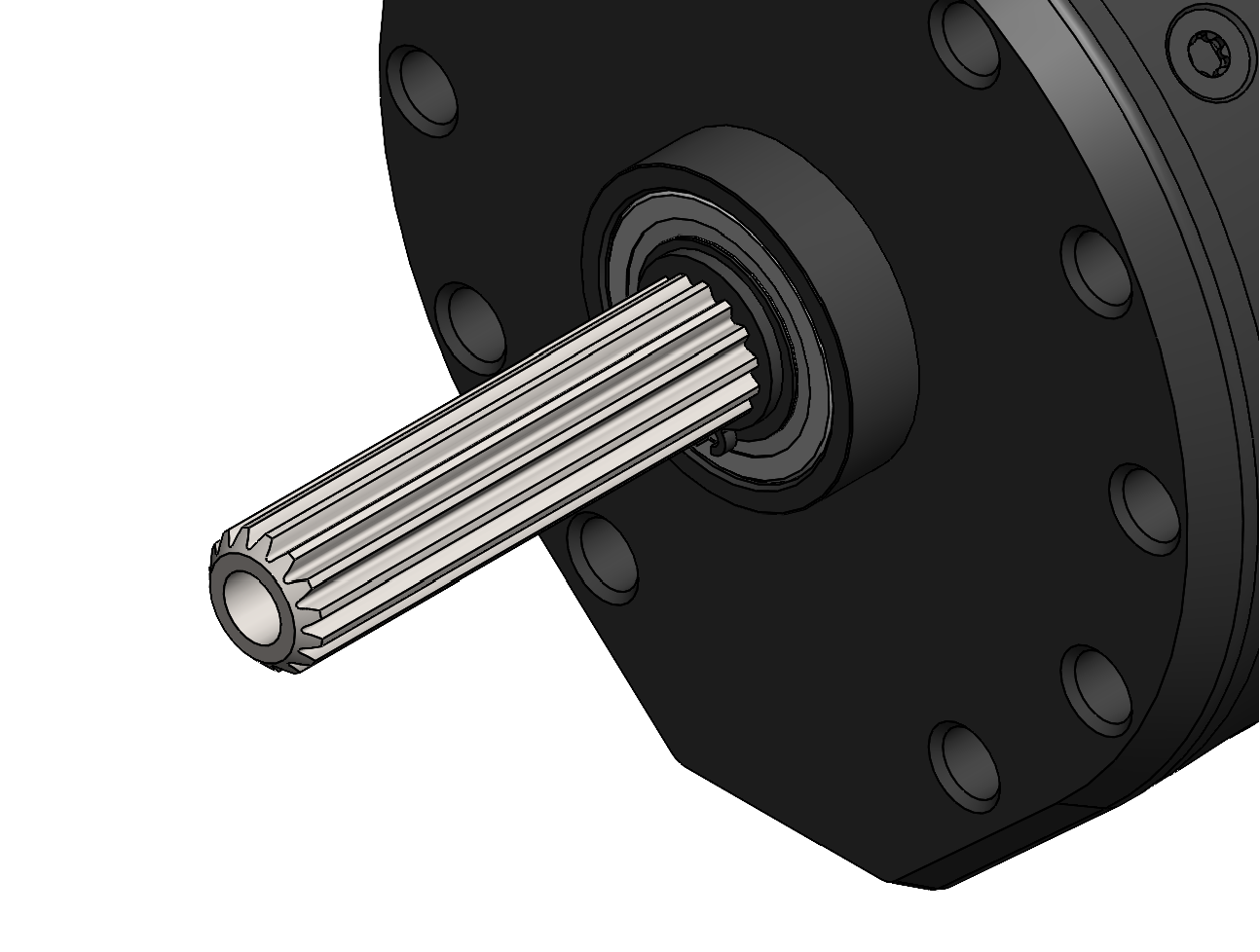 #### **Caracteristicas** ##### **8mm OD** [](https://docs.stemos.com.br/uploads/images/gallery/2026-03/image-20-03-26-at-11-38.jpeg) O SplineXS possui um diâmetro externo de 8 mm, o que significa que o eixo se encaixa em um rolamento padrão com diâmetro interno de 8 mm. Essa característica permite que as equipes ofereçam melhor suporte à extremidade do eixo SplineXS quando a aplicação exigir.O objetivo de usar um rolamento é suportar o eixo do motor para evitar que ele se dobre sob cargas elevadas. A maioria das aplicações da FRC não requer um rolamento. No entanto, existem algumas aplicações em que o uso de um rolamento no eixo do motor é benéfico. Algumas dessas aplicações incluem aquelas com cargas radiais (perpendiculares ao eixo de rotação) muito altas.
##### **Retenção do Eixo** O eixo SplineXS do Kraken X44 possui um furo roscado #10-32 na extremidade. Isso permite que as equipes prendam componentes como pinhões e polias ao eixo sem o risco de deformá-lo com o uso de um anel de retenção, como seria necessário em um motor CIM. [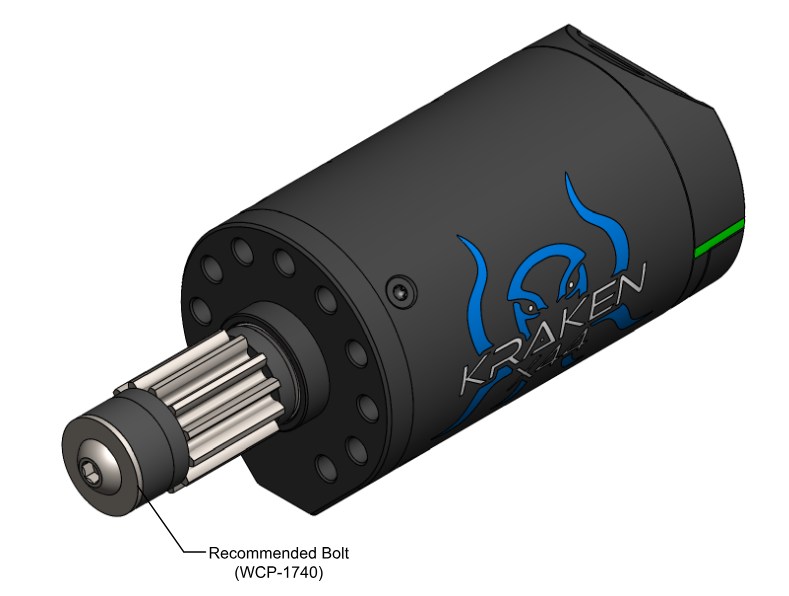](https://docs.stemos.com.br/uploads/images/gallery/2026-03/captura-de-tela-2026-03-23-091538.png) ##### **Eixo de saída não substituível** O eixo de saída dos motores Kraken são fixados permanentemente ao motor. Eles não podem ser substituídos por outro eixo, nem reinstalado caso seja cortado. Além disso, existem métodos redundantes para travar o eixo ao rotor tanto rotacionalmente quanto axialmente. #### **Parâmetros dos eixos SplineXS**| Pârametro | Valor | Unidade |
|---|---|---|
| Dentes livre | 15 | |
| Módulo | 0.5 | |
| Ângulo de pressão | 30 | Graus |