Kraken X60
Descrição
O Kraken X60 é um motor brushless desenvolvido pela WestCoast Products, projetado para suportar os rigores da FIRST Robotics Competition.
O Kraken X60 foi projetado para ser facilmente integrado aos projetos das equipes e possui diversas características que o diferenciam de outros motores brushless no mercado da FRC, incluindo:
- Potência de pico superior a 1.100 W*
- Eficiência máxima de 87% (a 30 A)*
- Torque de stall superior a 7 Nm*
- Novo eixo SplineXS
- Eixo de saída não substituível
- Opções de montagem versáteis
- Design mecânico robusto
Especificações Fisicas
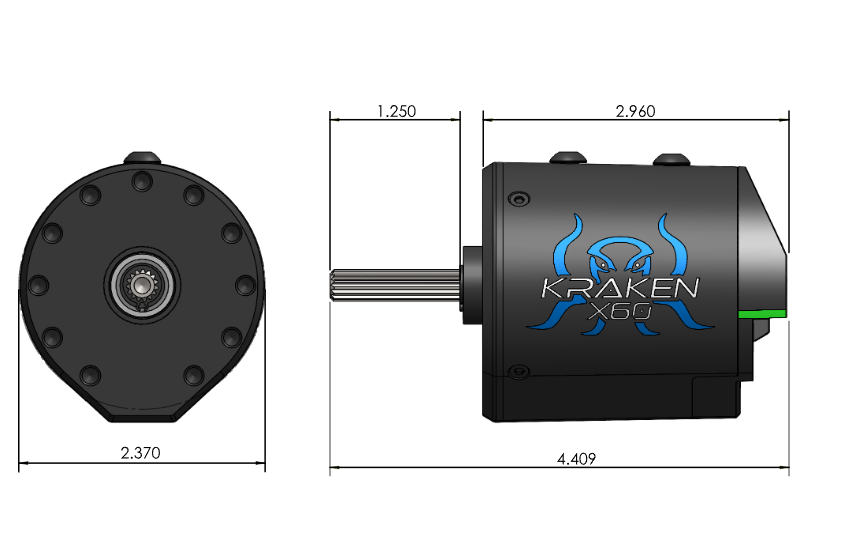
O Kraken X60 foi projetado para ser um substituto direto para um motor CIM/Mini CIM/NEO/Falcon. Isso significa que o tamanho, o peso e a montagem são semelhantes aos desses motores.
Diâmetro
| Descrição | Valores |
|---|---|
| Diâmetro | 60mm / 2.37in |
| Diâmetro efetivo com saliência | 63.5mm / 2.50in |
A saliência é o caminho que os fios do estator do motor interno passam pela parte traseira do motor. Esse recurso foi adicionado para permitir espaço suficiente para que os fios não entrem em contato com o rotor do motor.
Comprimento
O comprimento do Kraken X60 varia conforme a versão.
| Número da Peça | Descrição | Valor |
|---|---|---|
| WCP-0940 | Kraken X60 + Talon FX | 75mm / 2.96" |
Peso
O peso do Kraken X60 varia conforme a versão.
| Número da Peça | Descrição | Valor |
|---|---|---|
| WCP-0940 | Kraken X60 + Talon FX | 1.2 Lbs / ~544g |
Furos de montagem
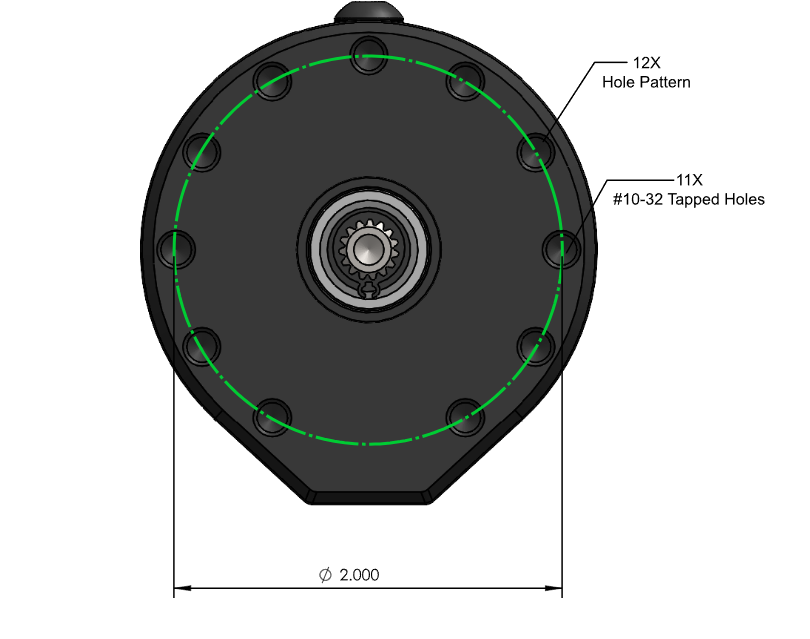
O Kraken X60 possui 11 furos de montagem #10-32 em um círculo de parafusos de 2 polegadas, espaçados a 30 graus.
A razão para os furos de montagem adicionais é permitir que o Kraken seja montado no padrão de montagem CIM tradicional de 2 furos, bem como em aplicações que utilizam os padrões de 6 e 8 furos do Falcon e do NEO.
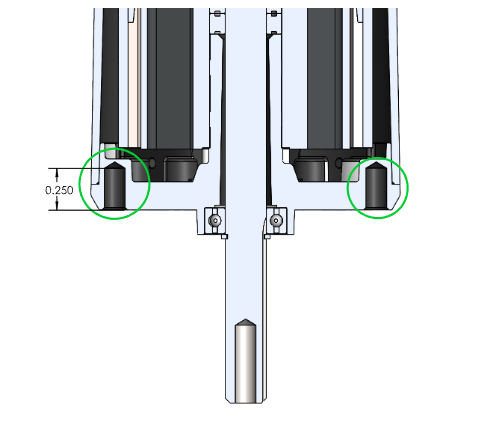
Furos Cegos
Cada furo de montagem é cego, ou seja, não atravessa a placa de montagem. Ao usar furos de montagem cegos, as equipes não podem travar o rotor interno do motor usando um parafuso muito comprido.
Ressalto de centralização (Pilot Boss)
O Kraken X60 também possui o mesmo ressalto de centralização de 3/4" de diâmetro que o CIM/MiniCIM/NEO/Falcon.

Performance do Motor
Parâmetros de Desempenho do Motor
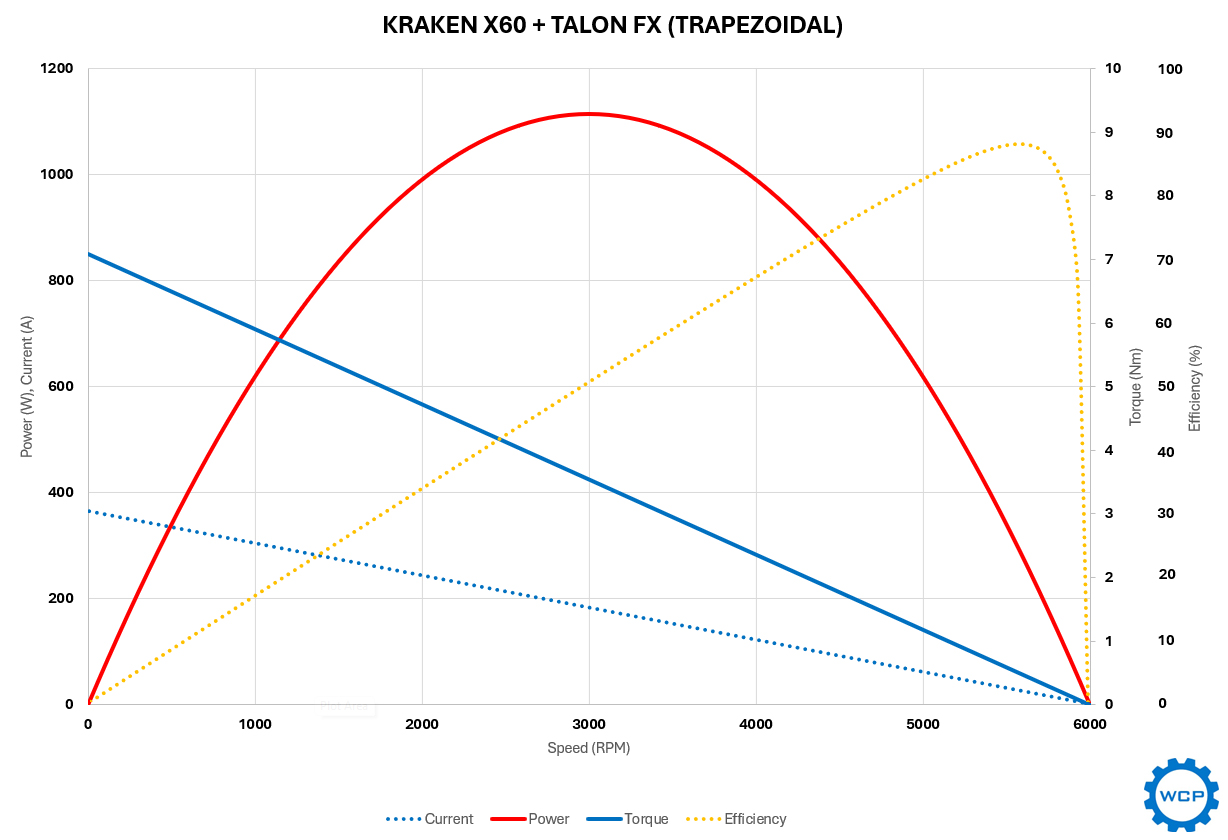
Comunicação trapezoidal
| Parametro | Valor | Unidade |
|---|---|---|
| Velocidade livre | 6000 | RPM |
| Corrente livre | 2 | A |
| Torque stall | 7.09 | Nm |
| Corrente stall | 366 | A |
| Potência máxima | 1108 | W |
| Eficiência máxima | 87% | Com / Sem |
| Corrente @ Eficiência Máxima | 30 | A |
| Potência @ 40A | 413 (86.1%) | W (%Eff) |
| Potência @ 30A | 313 (87.1%) | W (%Eff) |
| Potência @ 20A | 207 (86%) | W (%Eff) |
| Potência @ 10A | 94 (78%) | W (%Eff) |
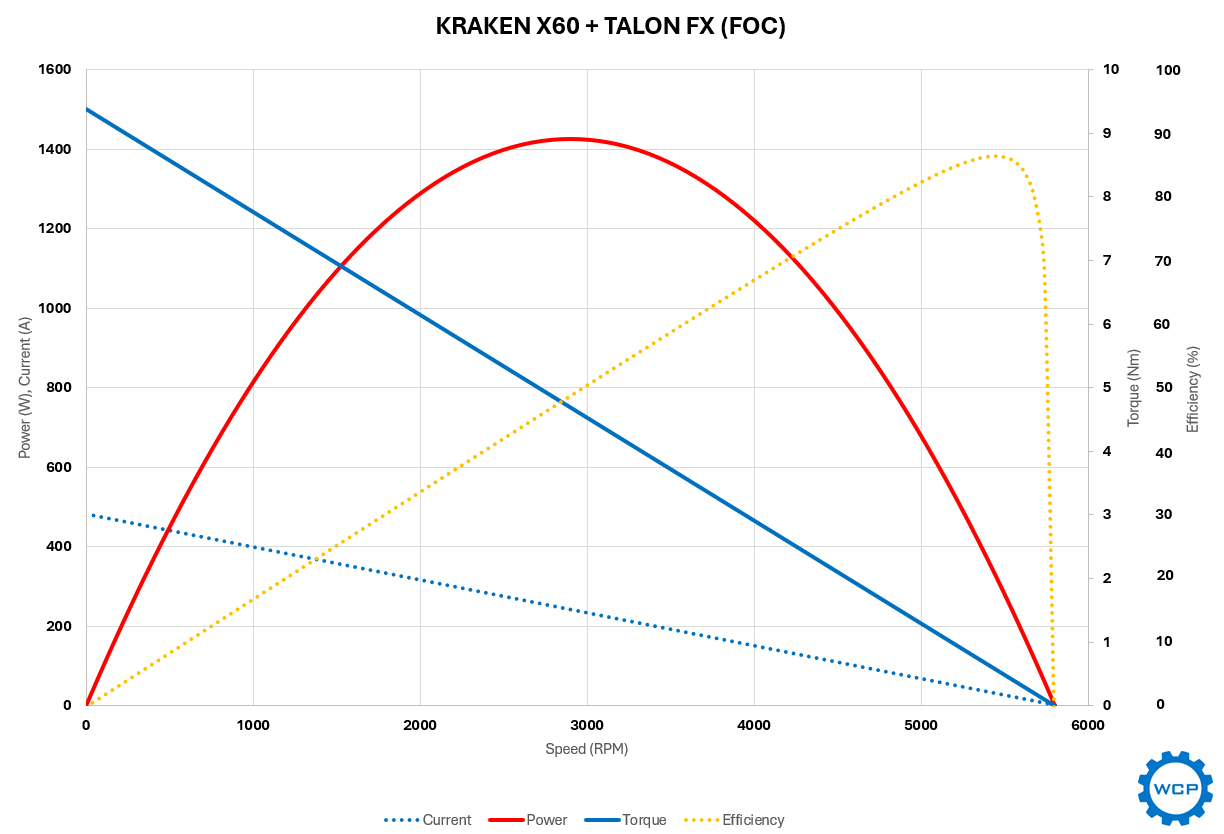
Field Oriented Control (FOC)
| Parametro | Valor | Unidade |
|---|---|---|
| Velocidade livre | 5,800 | RPM |
| Corrente livre | 2 | A |
| Torque stall | 9.37 | Nm |
| Corrente stall | 483 | A |
| Potência máxima | 1405 | W |
| Eficiência máxima | 85.4% | Com / Sem |
| Corrente @ Eficiência Máxima | 37 | A |
| Potência @ 40A | 409 (85.3%) | W (%Eff) |
| Potência @ 30A | 307 (85.3%) | W (%Eff) |
| Potência @ 20A | 199 (83.2%) | W (%Eff) |
| Potência @ 10A | 87 (72.5%) | W (%Eff) |
Uma nota sobre potência máxima
Para total transparência, as equipes não poderão usar toda a potência máxima do Kraken em um robô da FRC. Isso ocorre porque cada motor é limitado por um disjuntor de 40A, e o motor precisa de mais de quatro vezes essa corrente para produzir a potência máxima do Kraken. No entanto, uma potência máxima maior ainda é importante no contexto de um robô da FRC por dois motivos principais:
Os disjuntores usados na FRC são disjuntores térmicos e não desarmam exatamente na sua corrente nominal. É comum que alguns disjuntores permitam correntes bem acima da sua classificação por breves períodos (menos de um segundo). Isso significa que uma potência máxima maior pode ter um impacto na aceleração. Com uma aceleração mais rápida, o motor pode atingir a velocidade máxima mais rapidamente ao arrancar do zero ou ao mudar de direção.
Ao apresentar uma potência de pico mais alta, o Kraken consegue operar em um ponto mais estratégico da curva de potência durante uma partida da FRC. Isso permite que o motor funcione com maior eficiência, o que significa que menos energia elétrica é convertida em calor, permitindo que ele funcione por mais tempo antes de sofrer danos permanentes nos enrolamentos.