# Introdução
# Limelight - Visão ao seu robô sem código
___
##### A Limelight foi projetada para tornar a percepção de um robô tão fácil e confiável possível sem sacrificar nenhum desempenho!
A Limelight é fácil o suficiente para iniciantes completos e poderoso o suficiente para profissionais.
- Configure pipelines de visão computacional sem código para bolhas de cor, AprilTags, redes neurais e muito mais usando a interface web integrada.
- Escreva pipelines personalizadas em Python com SnapScript usando tensorflow, opencv e muito mais usando a interface web integrada ou o Visual Studio Code.
- O hardware Limelight integra um sensor de imagem MIPI-CSI de alta largura de banda e baixa latência, um computador arm64, condicionamento de energia e o LimelightOS.
- O LimelightOS suporta os protocolos REST/HTTP, Websocket, Modbus e NetworkTables, além de formatos de saída JSON, Protobuf e bruto.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ezgif-com-video-to-gif-converted.gif)
# Montagem
---
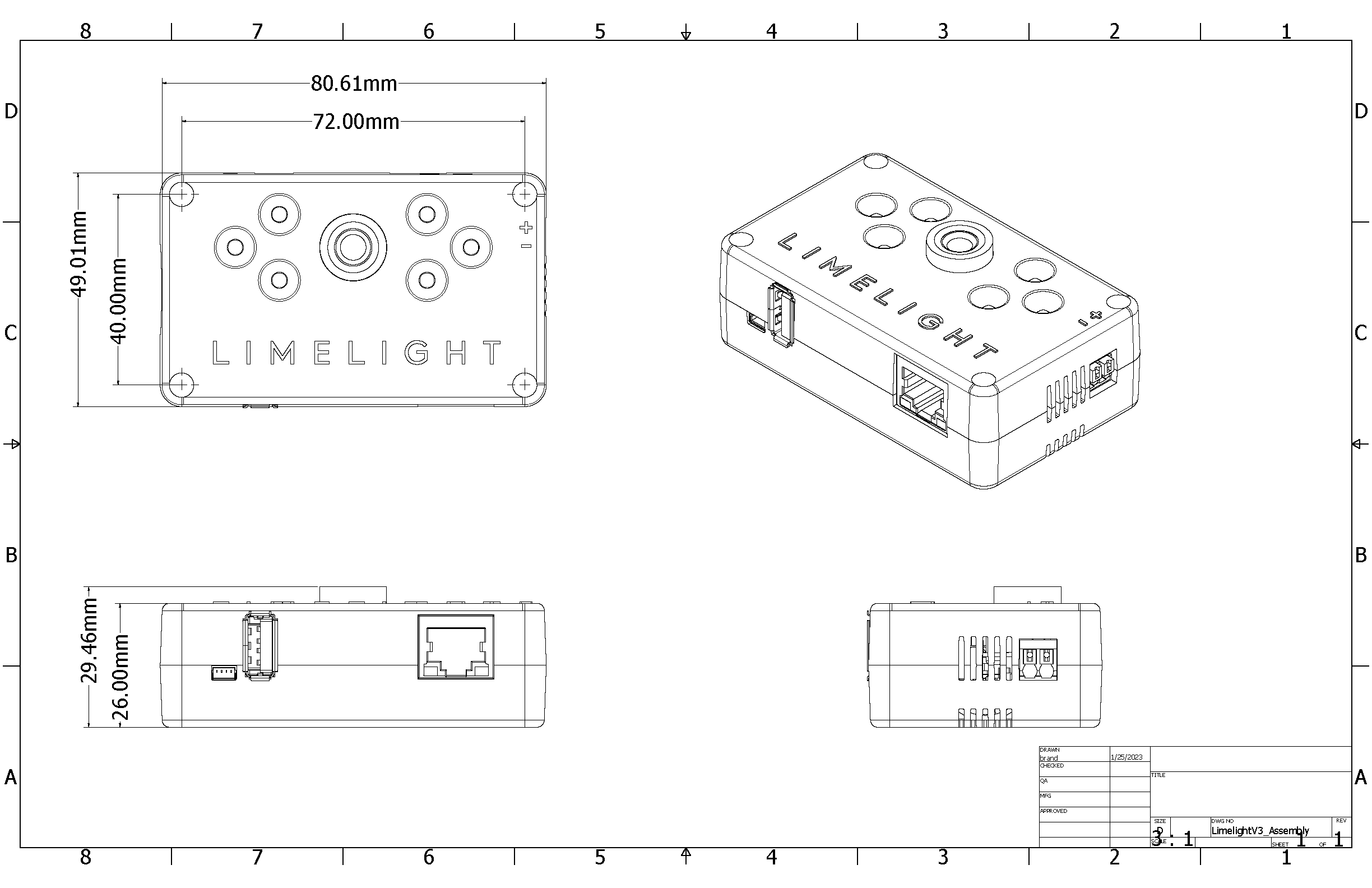
### **Limelight 3**
Use quatro parafusos de 1 1/2” #10-32 ou #10-24 e porcas de nylon para prender sua Limelight.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ll3drawingsmall-a22b3464743fdadb8b4ed88d17b63f4a.png)
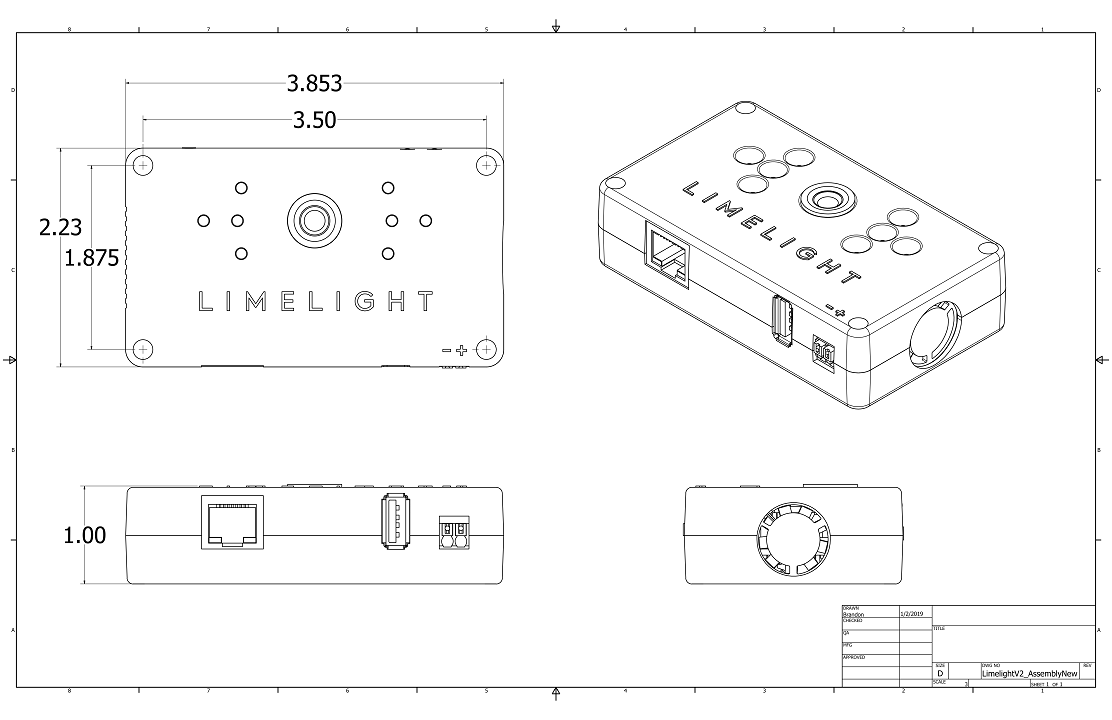
### **Limelight 2/2+**
Use quatro parafusos de 1 1/2” #10-32 ou #10-24 e porcas de nylon para prender sua Limelight.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ll2drawingsmall-f4bf56dfab5809654ca4b2e12e343899.png)
# Conexão
---
A Limelight recebe 12V de alimentação, porém é construida para funcionar até 4.5V. Os LEDs tem brilho constante até 7V
Não utilize o Radio Power Module da REV para alimentar sua Limelight. A tensão é muito alta
[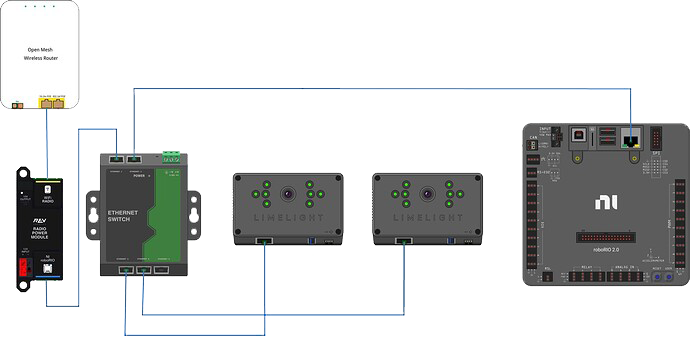](https://docs.stemos.com.br/uploads/images/gallery/2023-12/wiring2-735e3fc134120e9d6fb7e5212f37cc0f.png)
Credito - Christian Femia
### **Conexão Padrão**
- Não conecte os cabos na VRM
- Passe dois fios do seu Limelight para um slot no seu PDP/PDH (NÃO no seu VRM).
- Adicione qualquer disjuntor (5A, 10A, 20A, etc.) ao mesmo slot no seu PDP.
- Passe um cabo ethernet do seu Limelight para o rádio.
### **Conexão POE**
PoE permite que você adicione tanto energia quanto a conexão de rede a sua Limelight por meio de um cabo Ethernet.
Isto não é padrão IEEE 802.3 (44V-48V) PoE - é por isso que você deve usar um injetor passivo com 12V.
- Conecte um Injetor PoE Passivo ao seu PDP (NÃO ao seu VRM).
- Adicione qualquer disjuntor (5A, 10A, 20A, etc.) ao mesmo slot no seu PDP.
- Passe um cabo ethernet do seu Limelight para o seu injetor POE passivo.
### **Melhores Práticas de Fiação**
- Adicione alívio de tensão a todos os cabos de energia e ethernet que vão para o sua LL.
- Cole com cola quente todas as conexões.
- Adicione um switch de rede ao seu robô para permitir tethering ethernet durante os eventos e para evitar a segunda porta de rádio.
- Use cabos Cat6 trançados com fios flexíveis.
- Não é recomendado o uso da segunda porta de rádio. Roteie todos os dispositivos através do seu switch de rede, se possível.
# Atualizando o LimelightOS
---
Siga esse guia para atualizar sua Limelight para a versão mais recente do LimelightOS
### **Limelight 3**
- Desligue a sua Limelight.
- Baixe os últimos drivers USB, a imagem do sistema operacional Limelight e a ferramenta Balena Flash da [Página de Downloads da Limelight](https://limelightvision.io/pages/downloads).
- Conecte um cabo USB->USB-C do seu laptop ao seu Limelight. Seu Limelight ligará automaticamente.
- Execute o "Balena Etcher" como administrador.
- Pode levar até 20 segundos para que seu computador reconheça a câmera.
- Selecione a última imagem .zip na sua pasta de downloads.
- Selecione um dispositivo "Módulo de Computação" no menu "Drives".
- Clique em "Flash".
- Uma vez concluída a gravação, remova o cabo USB do seu Limelight.
### **Limelight 2/2+**
- Desligue o seu Limelight.
- Baixe os mais recentes drivers USB, a imagem do sistema operacional Limelight e a ferramenta Balena Flash da [Página de Downloads](#).
- Conecte um cabo USB->MicroUSB do seu laptop para o seu Limelight. O Limelight ligará automaticamente.
- Execute o "Balena Etcher" como administrador.
- Pode levar até 20 segundos para que o seu computador reconheça a câmera.
- Selecione a imagem .zip mais recente na sua pasta de downloads.
- Selecione um dispositivo "Compute Module" no menu "Drives".
- Clique em "Flash".
- Uma vez que a gravação esteja completa, remova o cabo USB do seu Limelight.
Conecte o cabo USB-C apenas durante a gravação. O Limelight entra em um modo especial de flash enquanto o cabo microUSB está conectado. Você não poderá acessar a interface web enquanto o Limelight estiver no modo flash.
# Setup de Comunicação/Network
---
Nós recomendamos fortemente seguir as instruções de IP estático para confiabilidade durante eventos. Siga estes passos antes de começar:
- Vá em adicionar/remover programas no Windows e procure por "bonjour"
- Quantos itens você vê?
- Se houver dois (2) itens com "bonjour" em seus nomes, desinstale "bonjour print services"
- Se não houver (0) itens com "bonjour" em seus nomes, instale bonjour da nossa página de Downloads.
- Reinicie seu Limelight/Robô e computador.
- Baixe a Ferramenta de Localização do Limelight da página de [Downloads](#)
### **Definir Número da Equipe**
- Ligue o seu robô e conecte seu computador à rede do seu robô.
- Após o seu Limelight piscar seus LEDs verdes, abra a Ferramenta de Localização do Limelight e procure pelo seu Limelight ou navegue para http://limelight.local:5801. Este é o painel de configuração.
- Navegue até a aba "Configurações" no lado esquerdo da interface.
- Insira o número da sua equipe e pressione o botão "Atualizar Número da Equipe".
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ezgif-com-video-to-gif-converted-1.gif)
## **Definir Endereço IP**
### **Endereçamento Estático**
- Mude o seu "Atribuição de IP" para "Estático".
- Defina o endereço IP do seu Limelight para "10.TE.AM.11".
- NOTA: Equipes com zeros precisam prestar atenção especial:
- A equipe 916 usa 10.9.16.xx,
- A equipe 9106 usa 10.91.6.xx
- A equipe 9016 usa 10.90.16.xx
- Defina a Máscara da Sub-rede para "255.255.255.0".
- Defina o Gateway para "10.TE.AM.1".
- Clique no botão "Atualizar".
- Dê ao seu roboRIO o seguinte endereço IP estático: "10.TE.AM.2"
- Recicle a energia do seu robô.
- Agora você poderá acessar o seu painel de configuração em 10.TE.AM.11:5801, e a transmissão da sua câmera em 10.TE.AM.11:5800.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ezgif-com-video-to-gif-converted-2.gif)
### **Endereçamento Dinâmico**
- Mude sua "Atribuição de IP" para "Automático".
- Clique no botão "Atualizar".
- Reinicie o Robô.
- Você pode continuar acessando seu painel de configuração em http://limelight.local:5801, e sua transmissão de câmera em http://limelight.local:5800
Conecte o cabo USB-C apenas durante a gravação de imagem. O Limelight entra em um modo especial de flash enquanto o cabo microUSB está conectado. Você não será capaz de acessar a interface web enquanto o Limelight estiver em modo flash.
Por que recomendamos o uso de um endereço IP estático?
Primeiro, isso reduz vários segundos do tempo de inicialização do Limelight. Segundo, as equipes historicamente tiveram problemas em campos FRC reais e com firmwares de rádio de eventos.
Recomendamos configurar endereços IP estáticos no seu robo-rio e driverstation também. As configurações de rede para usar em todos esses dispositivos podem ser encontradas perto da metade inferior desta [página web](#).
Como eu reseto o endereço IP?
Após o seu Limelight iniciar, segure o botão de configuração por 10 segundos. Na próxima vez que o Limelight iniciar, sua configuração de rede será redefinida para endereçamento dinâmico.
## **Antes de se Conectar ao Campo**
- Configure um IP estático para o seu laptop.
- IP: 10.TE.AM.5
- Máscara de Sub-rede: 255.0.0.0
- Gateway: 10.TE.AM.1
- Configure um IP estático para o seu RIO.
- IP: "10.TE.AM.2"
- Máscara de Sub-rede: 255.255.255.0 <- NOTE A DIFERENÇA AQUI
- Gateway: 10.TE.AM.1
- Dê as suas Limelights nomes de host únicos (se estiver usando vários).
- Dê as suas Limelights configurações de IP estático únicas.
- Comece sempre com endereços ".11" e vá subindo. (10.9.87.11, etc.)
- O uso de outros endereços pode causar mau funcionamento das suas unidades quando conectado ao FMS.
- IP: "10.TE.AM.11"
- Máscara de Sub-rede: 255.255.255.0
- Gateway: 10.TE.AM.1
Nota: Equipes com zeros precisam prestar atenção especial:
- A equipe 916 utiliza 10.9.16.xx
- A equipe 9106 utiliza 10.91.6.xx
- A equipe 9016 utiliza 10.90.16.xx
# Estado das luzes
____
### **Luz de status verde**
A luz de status verde piscará lentamente se nenhum alvo for detectado pela pipeline atual. Ela piscará rapidamente se algum alvo for detectado pela pipeline atual.
### **Luz de status amarela**
A luz de status amarela piscará quando um endereço IP estático não tiver sido atribuído. Se um endereço IP estático for atribuído, a luz permanecerá constantemente acesa ou apagada, sem piscar.
### **LEDs de iluminação verde**
Os LEDs de iluminação verde no Limelight 1, 2 e 3 são controláveis via interface web e várias APIs, mas existem alguns padrões especiais de piscar projetados para ajudar a solucionar problemas de hardware e software:
- Piscar alternado Esquerda/Direita ou Superior/Inferior: O cabo interno da câmera se soltou ou o sensor de imagem sofreu danos.
- Piscar Rápido (todos os LEDs): O botão de reinicialização de rede foi mantido pressionado por pelo menos 10 segundos.
- Sequência de Inicialização Repetida (três piscadas ou várias piscadas de desvanecimento): O software está falhando, possivelmente devido a danos no hardware.
# Início a Programação
____
O Limelight suporta os protocolos REST/HTTP, Websocket, Modbus e NetworkTables para dados de mira, dados de status e configuração ao vivo. Formatos de saída JSON, Protobuf e bruto estão disponíveis. Consulte a seção de APIs da documentação para obter mais informações.
Para equipes de FRC, o protocolo recomendado é o [NetworkTables](https://docs.wpilib.org/en/stable/docs/software/networktables/networktables-intro.html). O Limelight envia todos os dados de mira, incluindo um despejo completo em JSON, para o NetworkTables a 100hz. As equipes também podem definir controles, como ledMode, janela de corte e mais via NetworkTables. As equipes de FRC podem usar as bibliotecas Limelight Lib Java e C++ para começar com o Limelight em segundos. Limelight Lib é a maneira mais fácil de começar.
## **Biblioteca Limelight:**
[Java](https://github.com/LimelightVision/limelightlib-wpijava), [C++](https://github.com/LimelightVision/limelightlib-wpijava)
#### Java
```java
double tx = LimelightHelpers.getTX("");
```
---
#### C++
```c
#include "LimelightHelpers.h"
```
```c
double tx = LimelightHelpers::getTX("");
double ty = LimelightHelpers::getTY("");
```
---
#### Python
```python
wip
```
---
## **NetworkTables**
### Java
```java
import edu.wpi.first.wpilibj.smartdashboard.SmartDashboard;
import edu.wpi.first.networktables.NetworkTable;
import edu.wpi.first.networktables.NetworkTableEntry;
import edu.wpi.first.networktables.NetworkTableInstance;
```
```java
NetworkTable table = NetworkTableInstance.getDefault().getTable("limelight");
NetworkTableEntry tx = table.getEntry("tx");
NetworkTableEntry ty = table.getEntry("ty");
NetworkTableEntry ta = table.getEntry("ta");
//Lê os valores periodicamente
double x = tx.getDouble(0.0);
double y = ty.getDouble(0.0);
double area = ta.getDouble(0.0);
//Manda o valor para a smart dashboard periodicamente
SmartDashboard.putNumber("LimelightX", x);
SmartDashboard.putNumber("LimelightY", y);
SmartDashboard.putNumber("LimelightArea", area);
```
---
#### C++
```c
#include "frc/smartdashboard/Smartdashboard.h"
#include "networktables/NetworkTable.h"
#include "networktables/NetworkTableInstance.h"
#include "networktables/NetworkTableEntry.h"
#include "networktables/NetworkTableValue.h"
#include "wpi/span.h"
```
---
```c
std::shared_ptr table = nt::NetworkTableInstance::GetDefault().GetTable("limelight");
double targetOffsetAngle_Horizontal = table->GetNumber("tx",0.0);
double targetOffsetAngle_Vertical = table->GetNumber("ty",0.0);
double targetArea = table->GetNumber("ta",0.0);
double targetSkew = table->GetNumber("ts",0.0);
```
---
#### LabVIEW
[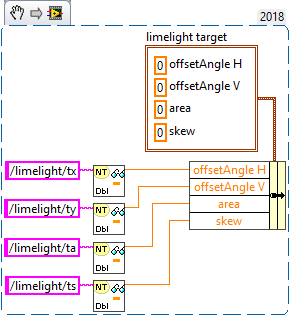](https://docs.stemos.com.br/uploads/images/gallery/2023-12/labview-10-7a12740da0d9ffa505ee79e94cdb9df0.png)
---
#### Python
```python
import cv2
import numpy as np
# runPipeline() é chamado todo frame pelo backend da Limelight
def runPipeline(image, llrobot):
# converte a imagem de input para o espaço de cor do HSV
img_hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# converte o hsv para uma imagem binaria removendo qualquer pixel
# que não sejam de acordo com os seguintes valores minimos e máximos do HSV
img_threshold = cv2.inRange(img_hsv, (60, 70, 70), (85, 255, 255))
# ache contornos na nova imagem binaria
contours, _ = cv2.findContours(img_threshold,
cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
largestContour = np.array([[]])
# inicializa um array vazio para mandar devolta ao robô
llpython = [0,0,0,0,0,0,0,0]
# se os contornos foram detectados, desenhe eles
if len(contours) > 0:
cv2.drawContours(image, contours, -1, 255, 2)
# grava o maior contorno
largestContour = max(contours, key=cv2.contourArea)
# pega a caixa delimitadora não rotacionada que envolve o contorno
x,y,w,h = cv2.boundingRect(largestContour)
# desenha a caixa delimitadora não rotacionada
cv2.rectangle(image,(x,y),(x+w,y+h),(0,255,255),2)
# grave alguns dados customizados para mandar devolta ao robô
llpython = [1,x,y,w,h,9,8,7]
#retorna o maior contor para a mira da LL, a imagem modificada, e os dados customizados
return largestContour, image, llpython
```
# Melhores práticas
___
### **Lista de Verificação de Preparação para o Evento**
- Baixe e faça backup de todas as pipelines para o seu laptop de programação.
- Faça o download de uma cópia da imagem mais recente do Limelight para o seu laptop de programação.
- Registre uma lista das suas pipelines e seus índices.
- 1 - Dual Target Low
- 2 - Dual Target High Cargo
- Adicione alívios de tensão a todos os cabos de energia e Ethernet que vão para o seu Limelight.
- Considere aplicar cola quente a todas as conexões.
- Certifique-se de estar usando um painel de controle (Smartdashboard, Shuffleboard) e não um navegador da web para visualizar o stream durante treinos e eventos. Os controles web padrão não têm a capacidade de reconectar automaticamente a streams após desconexões acidentais, mas o SmartDashboard e o Shuffleboard têm reconexão automática incorporada por padrão.
- Adicione um switch de rede ao seu robô para habilitar a conexão Ethernet enquanto estiver em um evento e evitar a segunda porta de rádio.
- Use cabos Cat6 torcidos com fios flexíveis. Não use cabos Ethernet planos.
- Não use a segunda porta de rádio. Encaminhe todos os dispositivos por meio do seu switch de rede, se possível.
- Configure o encaminhamento de porta (Port Forwarding) para permitir a comunicação do Limelight ao ser conectado ao seu robô via USB.
- Encaminhe as portas 5800, 5801, 5802, 5803, 5804, 5805, 5806 e 5807.
#### Java
```java
import edu.wpi.first.wpiutil.net.PortForwarder;
@Override
public void robotInit()
{
// Certifique-se de configurar o encaminhamento de porta apenas uma vez no código do robô.
// Não coloque essas chamadas de funções em funções periodicas
for (int port = 5800; port <= 5807; port++) {
PortForwarder.add(port, "limelight.local", port);
}
}
```
---
#### C++
```c
import edu.wpi.first.wpiutil.net.PortForwarder;
@Override
public void robotInit()
{
// Certifique-se de configurar o encaminhamento de porta apenas uma vez no código do robô.
// Não coloque essas chamadas de funções em funções periodicas
for (int port = 5800; port <= 5807; port++) {
PortForwarder.add(port, "limelight.local", port);
}
}
```
---
### **Calibração durante o evento**
- Role seu robô até cada alvo no campo.
- Certifique-se de que a segmentação está funcionando corretamente. Mude para a visualização "threshold" durante este processo (localizada abaixo do fluxo de imagem).
- Role seu robô próximo ao alvo e longe do alvo. Garanta que as miras estejam calibradas corretamente.
- Enquanto estiver longe do alvo, gire seu robô para a esquerda e para a direita ~ 30 graus para garantir que outros alvos não sejam rastreados erroneamente.
- Consulte a seção de ajuste abaixo para mais dicas de ajuste.
- Certifique-se de que nenhum outro elemento do campo/arena esteja sendo rastreado acidentalmente. Verifique seus filtros de área e proporção se estiver captando as luzes da arena.
- Tire capturas de tela de todos os alvos e rastreamentos incorretos. Você pode usá-los para ajustar suas pipelines nos boxes.
### **Melhorando o pipeline**
- Utilize a exposição mais baixa possível e aumente o deslocamento do nível de preto até que as luzes do campo e reflexos de LEDs sejam removidos da imagem.
- Teste sua segmentação enquanto estiver longe e inclinado para longe do seu alvo.
- Use o recurso "Smart Speckle Rejection" da versão 2019.7 para filtrar reflexos indesejados de LEDs.
### **Antes de conectar ao campo**
- Configure seu laptop com uma configuração de IP estático.
- IP: 10.TE.AM.5
- Máscara de Sub-rede: 255.0.0.0
- Gateway: 10.TE.AM.1
- Configure seu RIO com uma configuração de IP estático.
- IP: "10.TE.AM.2"
- Máscara de Sub-rede: 255.255.255.0 <- ATENÇÃO PARA A DIFERENÇA AQUI
- Gateway: 10.TE.AM.1
- Dê nomes de host exclusivos para seus Limelights (se estiver usando vários).
- Forneça configurações de IP estático únicas para seus Limelights.
- Comece sempre com endereços terminados em ".11" e vá aumentando. (10.9.87.11, etc.)
- O uso de outros endereços pode fazer com que suas unidades apresentem mau funcionamento quando conectadas ao FMS.
- IP: "10.TE.AM.11"
- Máscara de sub-rede: 255.255.255.0
- Gateway: "10.TE.AM.1"
Nota: As equipes com zeros precisam prestar atenção especial:
```
- _Team 916 uses 10.9.16.xx,_
- _Team 9106 uses 10.91.6.xx_
- _Team 9016 uses 10.90.16.xx_
```
Informação adicional: [https://docs.wpilib.org/en/stable/docs/networking/networking-introduction/ip-configurations.html](https://docs.wpilib.org/en/stable/docs/networking/networking-introduction/ip-configurations.html)
### **Lista de checagem Pré-Partida**
- Verifique todos os cabos de energia e Ethernet que vão para seus Limelights.
- Verifique todas as conexões elétricas quanto a folgas e fios desgastados.
- Verifique todos os parafusos de fixação / abraçadeiras / fita adesiva.
- Observe precauções contra descarga eletrostática (ESD) o tempo todo.
### **Largura de banda**
- Algumas equipes utilizam dois Limelights com duas câmeras USB, mantendo-se bem abaixo do limite de largura de banda. Siga as etapas abaixo para reduzir a largura de banda.
- Em vez de usar o modo de condução, crie uma pipeline "driver". Reduza a exposição para diminuir a largura de banda do stream.
- Está usando uma câmera USB? Utilize a chave NT "stream" para ativar o modo picture-in-picture. Isso reduzirá drasticamente a largura de banda do stream.
- Configure a taxa de stream para "baixa" na página de configurações se o streaming não for crítico para a condução.
- Utilize a opção de stream 160x120 introduzida na versão 2019.7.
### **Solução de erros**
- Tente acessar o stream em IP:5800 com um navegador da web. Isso deve ajudar a determinar a origem dos seus problemas.
- Reinicie o seu painel de controle.
- Reinicie o seu computador.
- Reinicie o seu robô se o campo tiver sido redefinido.
- Cabos Ethernet danificados podem ser a causa de problemas intermitentes de rede.
- Sempre use configurações de IP estático no campo.
# Calibração de mira
___
As miras do Limelight transformam a calibração angular 2D em um processo simplificado. Em vez de armazenar desvios angulares no código, você pode alinhar manualmente seu robô a um alvo e clicar no botão "calibrar".
Calibrar uma mira move o "zero" dos seus dados de mira. Isso é muito útil se o Limelight não estiver perfeitamente centrado no seu robô.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ezgif-com-video-to-gif-converted-3.gif)
### **Modo de mira única**
Posicione o seu robô na sua localização e rotação ideais para pontuar e clique em "calibrar". Agora, um tx e ty de "zero" equivalem a um robô perfeitamente alinhado. Se o seu robô precisar ser recalibrado para um novo campo, simplesmente realize uma partida de treino para encontrar o alinhamento perfeito para o seu robô e clique em "calibrar" durante a partida.
### **Modo de mira dupla**
Imagine um robô com uma câmera ou atirador fora do eixo que precisa lançar objetos do jogo em um gol de várias posições no campo. À medida que o robô se aproxima do gol, sua mira deve ajustar em tempo real para compensar. O modo de mira dupla foi criado para essa funcionalidade. Alinhe o seu robô na sua posição e rotação mais próxima de pontuação e calibre a mira "A". Alinhe o seu robô na sua posição e rotação mais distante de pontuação e calibre a mira "B". Ao calibrar no modo de mira dupla, as miras também armazenam um valor de área. Você perceberá que, à medida que o seu robô se move entre as distâncias mínima e máxima de pontuação, a mira se move entre a mira "A" e a mira "B". Isso é feito verificando a área do alvo e comparando-a com as duas áreas de alvo vistas durante a calibração.
# Configuração Pipeline
____
O LimelightOS armazena até 10 pipelines de visão exclusivas. Você pode alterar a pipeline ativa em tempo real com o LimelightLib.
Para editar várias pipelines, você deve primeiro marcar a caixa "Ignore NetworkTables Index" na interface web. Isso forçará o robô a permitir temporariamente que você altere o índice da pipeline por meio da interface web, em vez de por meio do NetworkTables.
Para baixar suas pipelines para backup e compartilhamento, basta clicar no botão "download" próximo ao nome da sua pipeline. Para carregar uma pipeline, clique no botão "upload".
Aqui está um exemplo de um robô que utiliza duas pipelines:
[Exemplo de Robô com Duas Pipelines](https://thumbs.gfycat.com/UnfitLankyHadrosaurus-size_restricted.gif)
A primeira pipeline é ajustada para identificar faixas verticais únicas. A segunda pipeline é ajustada para encontrar uma combinação de duas faixas horizontais. O código para este robô está disponível no estudo de caso "Aim and Range".
Observe que, quando o robô alterna entre pipelines, a interface web carrega automaticamente a nova pipeline.
## **Aba de entrada**
---
A guia de entrada (Input Tab) oferece controles para alterar a imagem da câmera antes que ela seja processada pela pipeline de processamento.
### **Tipo da pipeline**
Controla o tipo desejado de pipeline (AprilTags, Redes Neurais, Python, etc.).
### **Imagem de origem**
Controla a fonte da imagem que é passada pela pipeline. Mude para "Snapshot" para testar suas pipelines de visão em snapshots armazenados.
Este controle é redefinido automaticamente para "Camera" quando a interface gráfica é fechada.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ezgif-com-video-to-gif-converted-4.gif)
### **Resolução + zoom**
Controla a resolução da câmera e da pipeline de visão. Recomendamos o uso da pipeline 320x240, a menos que você esteja utilizando funcionalidades 3D.
Pipelines de 320x240 executam a 90fps, enquanto pipelines de 960x720 executam a 22 fps. Em 2020, foram adicionadas opções de Zoom de Hardware 2x e 3x para este campo. As opções de zoom não são digitais e usam pixels reais do sensor a 100%.
### **LEDs**
Controla o modo padrão de LED para esta pipeline. Isso pode ser substituído durante uma partida com a opção de tabela de rede "LED".
Usuários do Limelight 2+ têm acesso a um controle deslizante de "Brilho do LED" que permite ajustar o brilho dos LEDs.
### **Orientação**
Controla a orientação dos frames de entrada. Defina como "inverted" se sua câmera estiver montada de cabeça para baixo.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ezgif-com-video-to-gif-converted-5.gif)
### **Exposição**
Controla a configuração de exposição da câmera em intervalos de 0,01 milissegundos. Pense em uma câmera como uma grade de "buckets" (recipientes) para coletar luz - o tempo de exposição controla por quanto tempo os "buckets" da sua câmera ficam abertos por quadro. Reduzir o tempo de exposição efetivamente escurecerá sua imagem. Tempos de exposição baixos e fixos são cruciais no FRC, pois escurecem a maior parte dos dados de imagem recebidos. Fitas retrorrefletivas bem iluminadas se destacarão em uma imagem principalmente escura, tornando o processamento de visão um processo direto.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ezgif-com-video-to-gif-converted-6.gif)
### **Deslocamento do nível de preto**
Aumentar o deslocamento do nível de preto pode escurecer significativamente o stream da sua câmera. Isso deve ser aumentado para remover ainda mais as luzes da arena e pontos brilhantes da sua imagem. Esta é uma configuração de nível de sensor e não uma configuração de brilho digital falso.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ezgif-com-video-to-gif-converted-7.gif)
### **Ganho do Sensor**
Aumentar o ganho do sensor efetivamente aumentará o brilho da imagem, mas geralmente adicionará ruído à imagem também. Você pode usar o Ganho do Sensor e o Deslocamento do Nível de Preto para iluminar a imagem sem aumentar o tempo de exposição. Isso minimizará o desfoque de movimento para aplicações de rastreamento em alta velocidade.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ezgif-com-video-to-gif-converted-8.gif)
### **Balanço de Vermelho, Balanço de Azul**
Controla a intensidade dos componentes de cor vermelha e azul na sua imagem. Isso controla coletivamente o balanço de branco do seu Limelight. Recomendamos deixar esses valores inalterados.
[](https://docs.stemos.com.br/uploads/images/gallery/2023-12/ezgif-com-video-to-gif-converted-9.gif)