Guia de uso
- Instalação
- Inicio rápido
- Driver Station
- IDE
- LED status
- Controle
- Motores
- Servos
- Sensores Digitais
- Encoder
- IMU
Instalação
A presente página tem como objetivo explicar como realizar a instalação da Driver Station e do ambiente de desenvolvimento para a plataforma EasySTEAM.
Observação: o que estiver marcado como EM DESENVOLVIMENTO irá ser alterado futuramente ou ainda está para ser adicionado.
Requisitos (EM DESENVOLVIMENTO)
- Windows 10 ou superior;
- Administrador (somente para iniciar o instalador);
- Espaço livre de 5Gb.
Download
Para começar, é preciso fazer o download do executável, que pode ser obtido no endereço abaixo:
Instalador EasySTEAM
Instalação
Antes de começar a instalação, certifique-se de que o computador tenha uma conexão estável com a internet. Caso seja uma rede com regulações informe ao TI da instalação para que seja liberado.
Driver Station
- Execute o arquivo recém obtido.
- Deve aparecer uma tela de segurança perguntando se você quer mesmo executar, clique que "Sim".
- Caso seu usuário não seja administrativo, solicite para quem tenha um usuário administrativo na máquina que coloque as credenciais quando solicitado (é obrigatório para o começo da instalação).
Feito isso você deve ver aparecer uma tela de carregamento, aguarde até a conclusão.
Após isso, deve aparecer uma tela semelhante a essa:
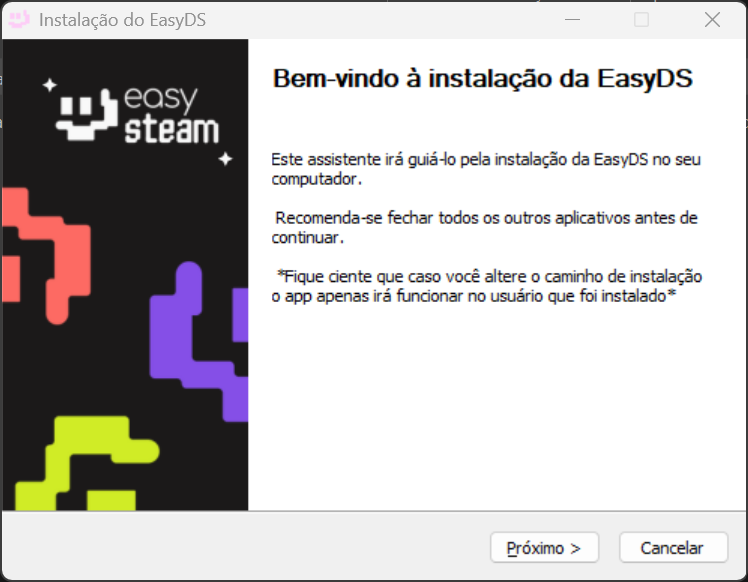
- Clique em próximo.
A próxima janela indica a pasta de destino onde o sistema será instalado.
- É recomendado não alterar esse caminho.
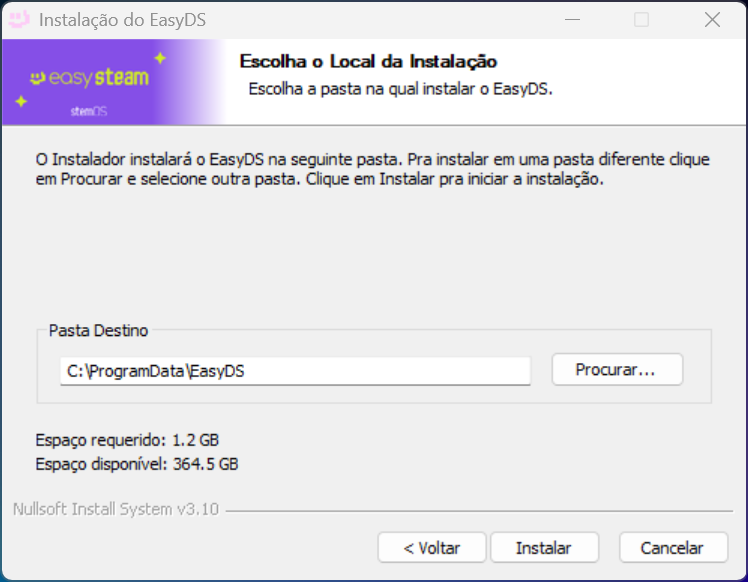
- Clique em Instalar
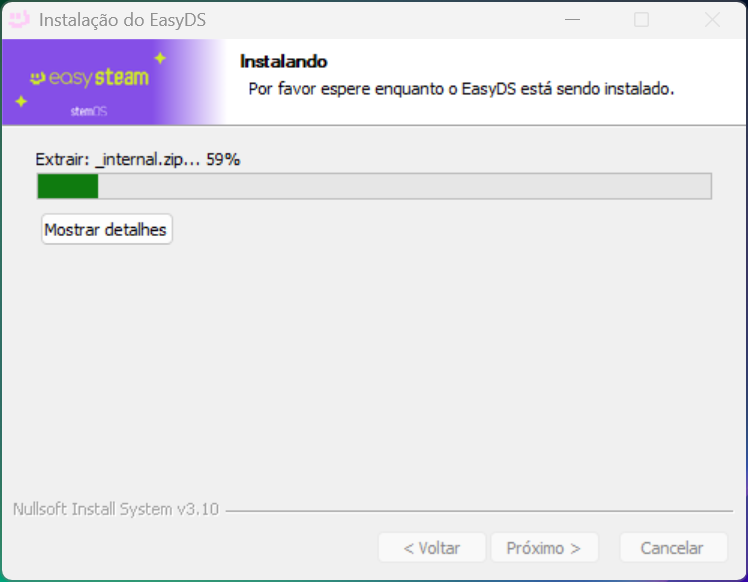
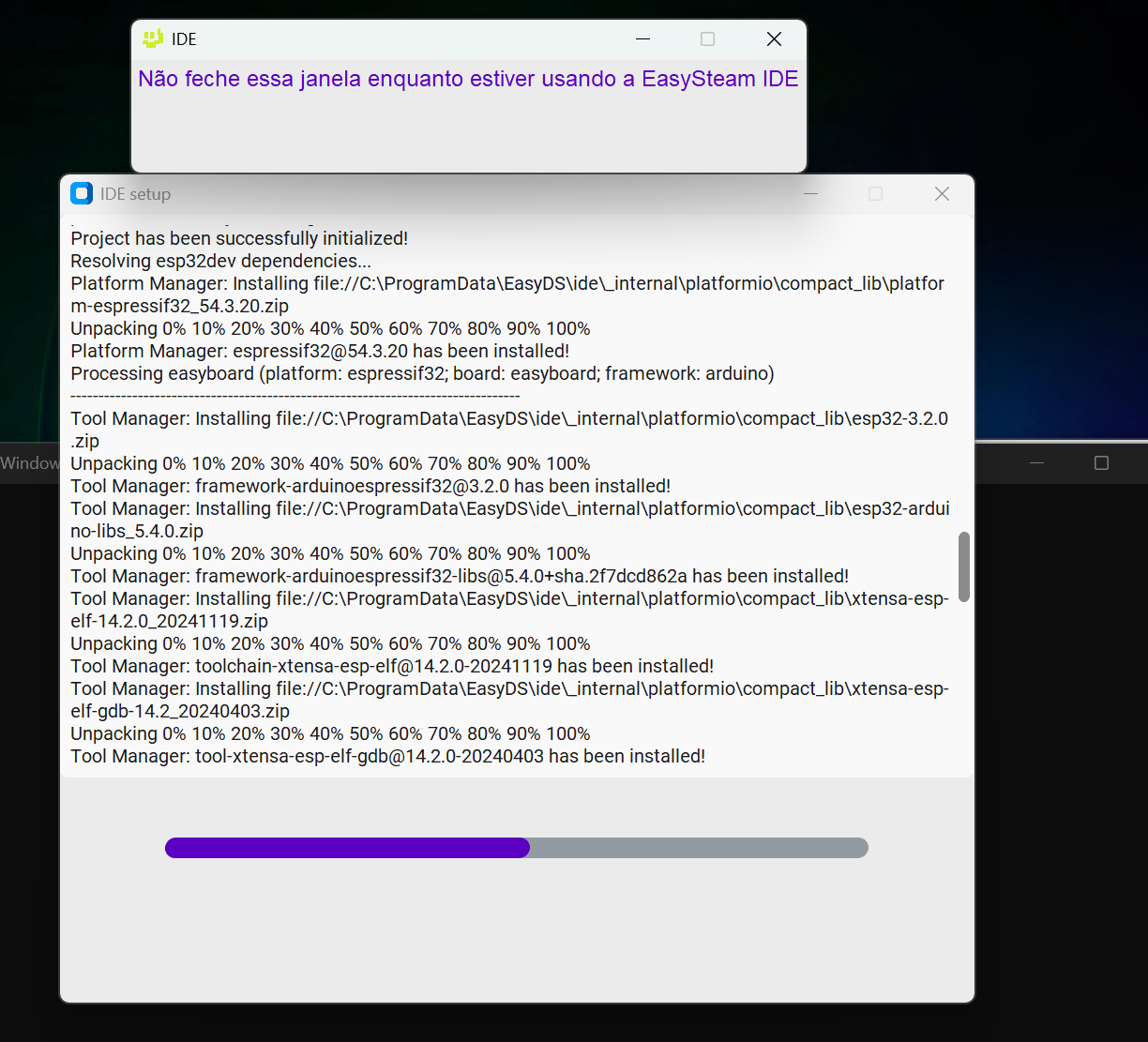
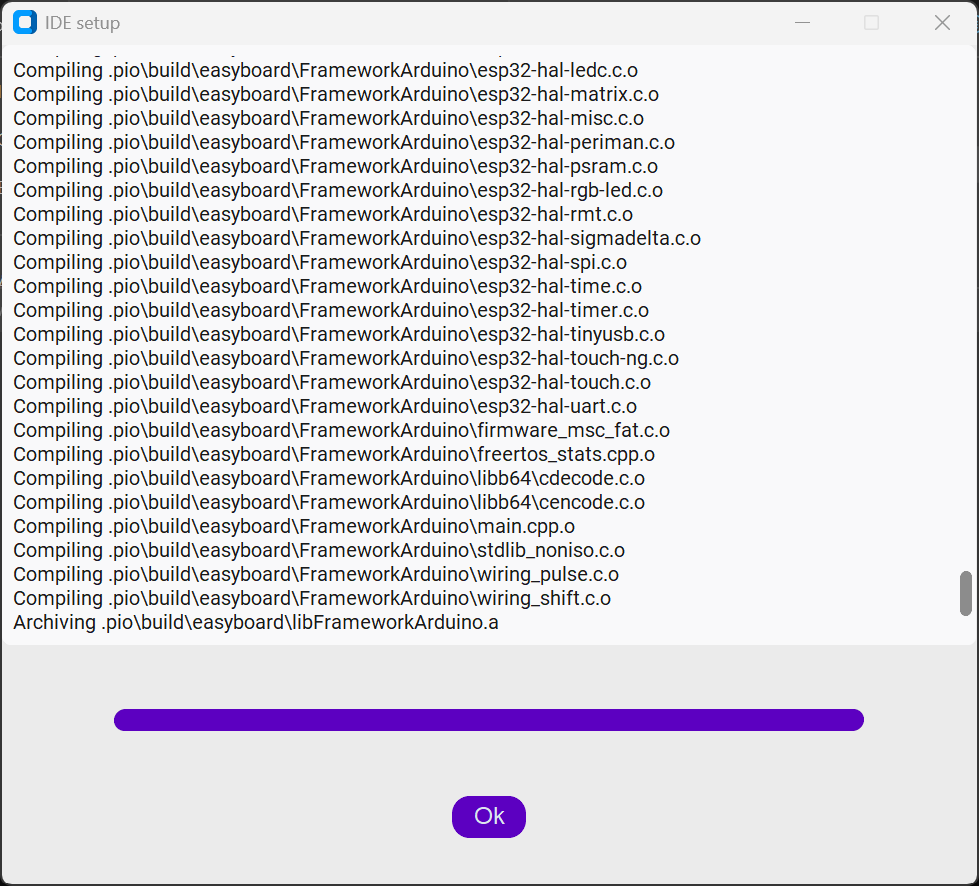
- Em um dado momento da instalação deve aparecer três janelas informando que o sistema de desenvolvimento Easy IDE está sendo instalado. Não feche-as.
- Clique em Ok quando finalizado.
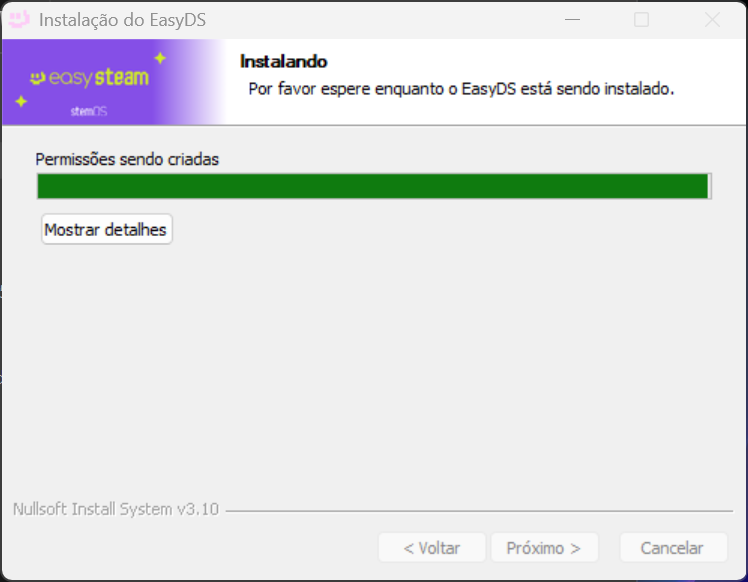
- Aguarde as permissões serem concluídas.
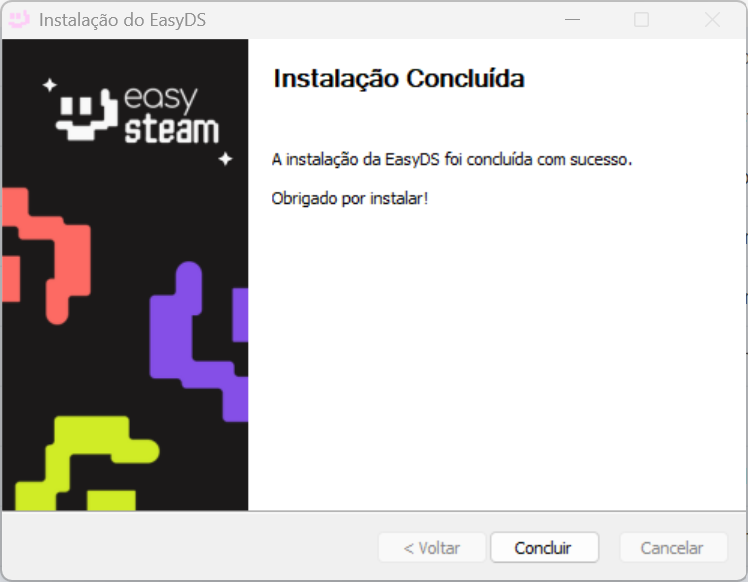
- Clique em "Concluir".
Inicio rápido
A presente seção tem como objetivo indicar a ordem que as páginas devem ser lidas para iniciar a utilização da EasyBoard.
Instalação
Para realizar a instalação do ambiente de programação EasySTEAM acesse a seguinte página: Instalação
Utilização da Driver Station
Leia o seguinte capítulo para entender o uso da Driver Station: Driver Station
Como complemento também veja: LED status
Ambiente de programação
Para entender como fazer códigos próprios leia: IDE
Categorias
Leia o seguinte capítulos (e os que estão além dele) para entender a utilização da maioria dos blocos: Controle
Observação: alguns blocos desses documentos são legados e não existe mais. Mas o uso deles não se alterou drasticamente.
Driver Station
Página Inicial
Esta página tem como objetivo explicar a utilização da página inicial da Driver Station.
A página inicial deve ter uma aparência semelhante a essa:

Status
Na aba superior é possível vermos alguns textos de status, a funcionalidade deles é prover informações importantes durante a utilização do programa.
- Status da conexão Wi-Fi:
- Esse indicador deve ficar da cor verde quando o computador estiver conectado a EasyBoard via Wi-Fi. E vermelho quando não estiver.

- Status da conexão USB:
- Quando a placa for conectada via USB, o indicador deve ficar na cor verde. E vermelho quando não estiver.

- Número da placa:
- Esse número mostra os dois digitos finais do nome da rede, para você saber em qual rede deve se conectar caso haja mais de uma placa no ambiente.

Deve também aparecer ao lado do botão "Conectar" um aviso semelhante a este:

Ambiente de blocks
Quando clicado deve abrir o ambiente de programação em blocos em outra página.
Documentação sobre o blocks
Quando clicado deve abrir a documentação do sistema EasySTEM como um todo.
Tutorial de conexão
Explica como estabelecer uma conexão sem fio com a EasyBoard e utiliza-lá.
Siga esse tutorial para saber como você deve se conectar a placa
Habilitar e Desabilitar
Quando conectado a placa, deve aparecer um botão para desconectar e desabilitar:

O robô começa a poder ser controlado quando o botão "Habilitar" for pressionado. Quando isso acontecer, ele deve trocar para o seguinte estado:

Controle
Na parte inferior da janela deve aparecer uma mensagem indicando se o controle está ou não conectado ao computador.
Atividades
Na Driver Station, mais especificamente no lado esquerdo, é possível vermos um botão escrito "Atividades". Quando clicarmos, o usuário deve ser conduzido para a seguinte página:

Essa página tem como objetivo possibilitar o upload de códigos exemplos já compilados, além de permitir a visualização dos códigos de exemplo e guia da montagem (em desenvolvimento)
Upload de código
Tenha certeza te estar conectado a placa para realizar o processo descrito abaixo
Clicando em "Enviar código para o EasyBoard", o upload do código de exemplo será executado para a placa. Portanto, depois disso, você pode voltar para a página inicial e pilotar.
Visualização de código exemplo

O botão "Visualizar código" deve abrir uma aba do navegador com o código de exemplo carregado.
Guia de montagem (EM DESENVOLVIMENTO)
Diagnóstico
A página de diagnóstico da Driver Station deve ter uma aparência semelhante a essa:
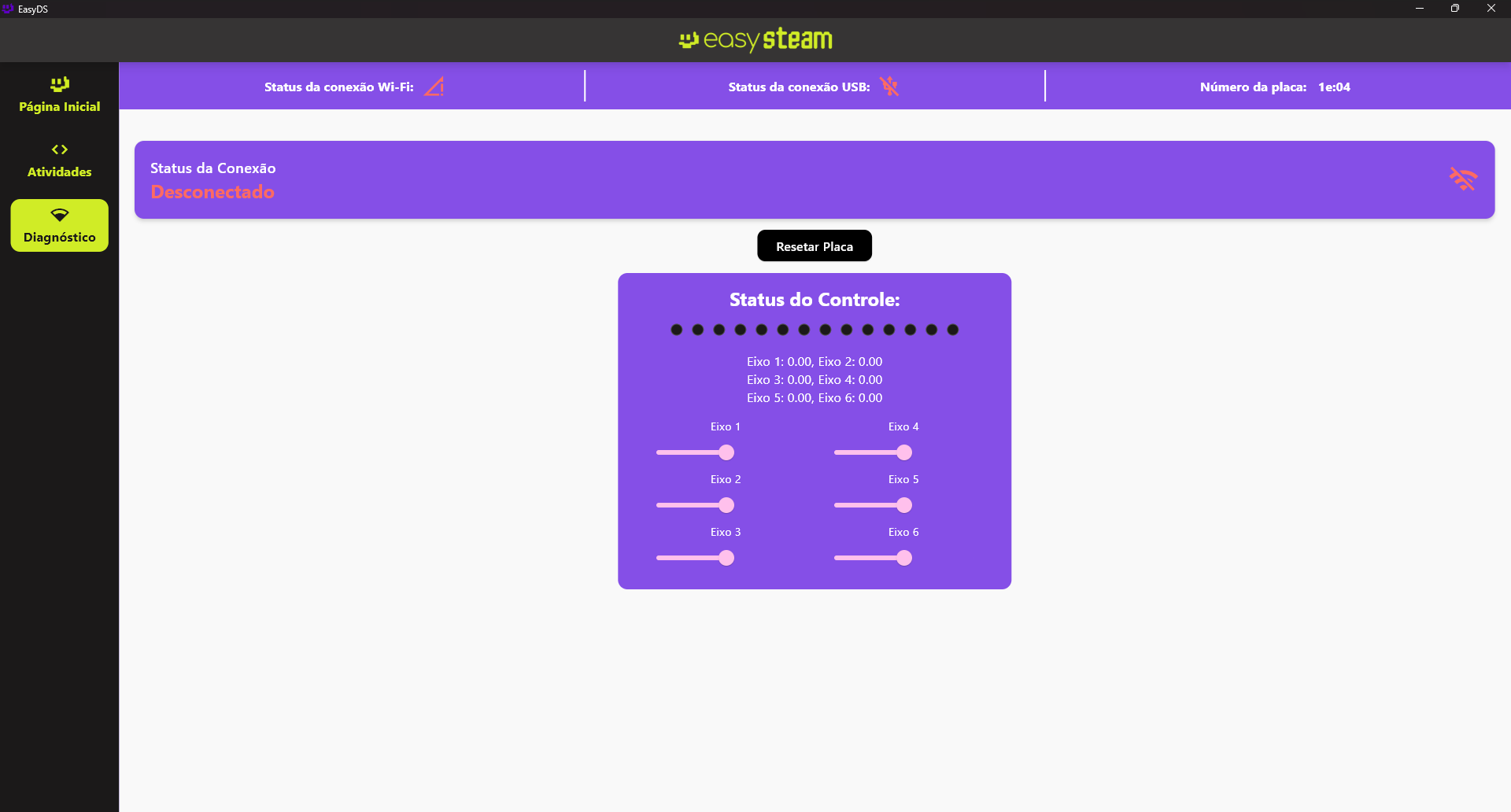
Essa página nos fornece três informações:
- Se a placa está desconectada ou a latência de resposta;
- É possível resetarmos a placa;
- Visualização das respostas do controle.
IDE
O presente capítulo tem por objetivo explicar a utilização do ambiente de desenvolvimento em blocos e texto.
Página Inicial
Ao clicar em "Ambiente de programação blocks" deve abrir a página inicial do ambiente de desenvolvimento.
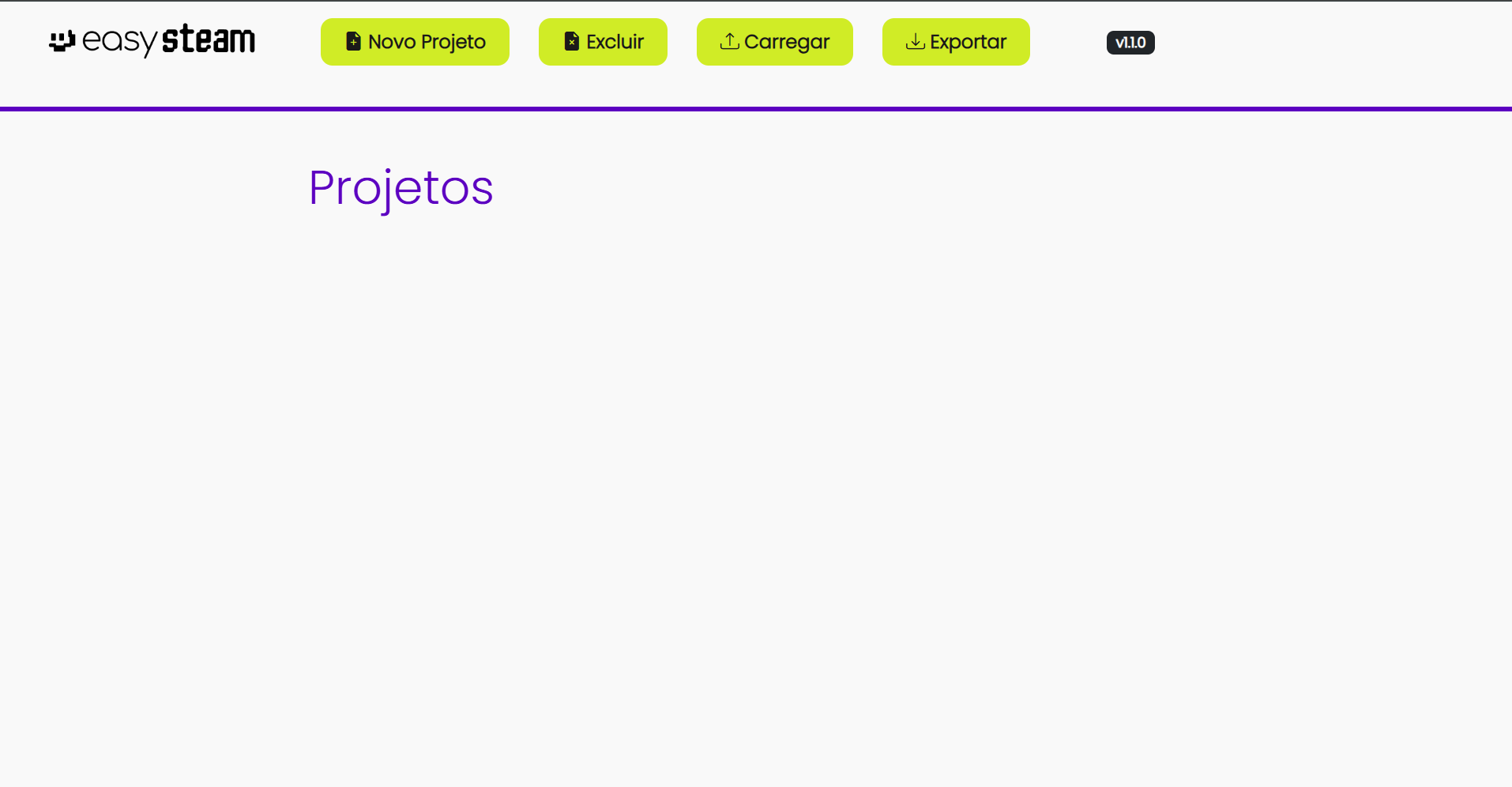
Essa página inicial contém alguns botões, suas funções serão descritas abaixo.
Novo Projeto
Esse botão possibilita a criação de novos projetos. Tanto em texto, quanto em blocos.
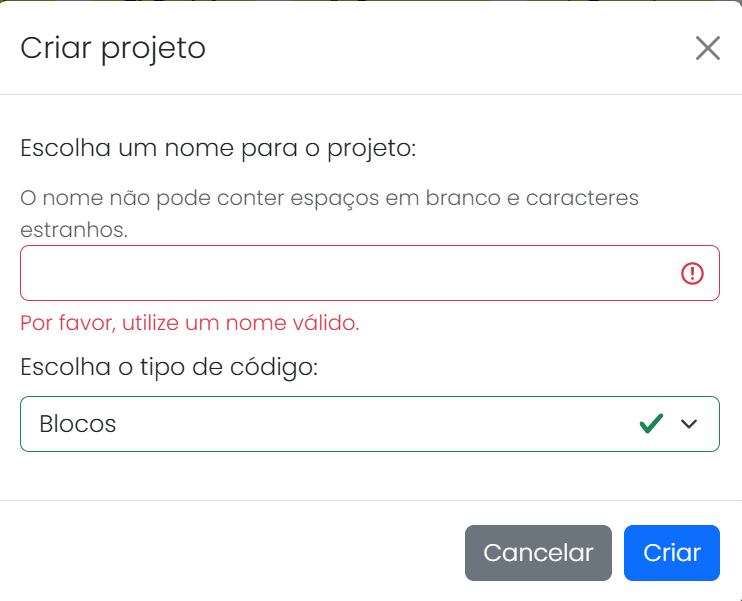
Clique em "Criar" para de fato gerar o projeto, não existe atalho para esse botão
Quando o projeto for criado, a tela inicial será semelhante a essa:
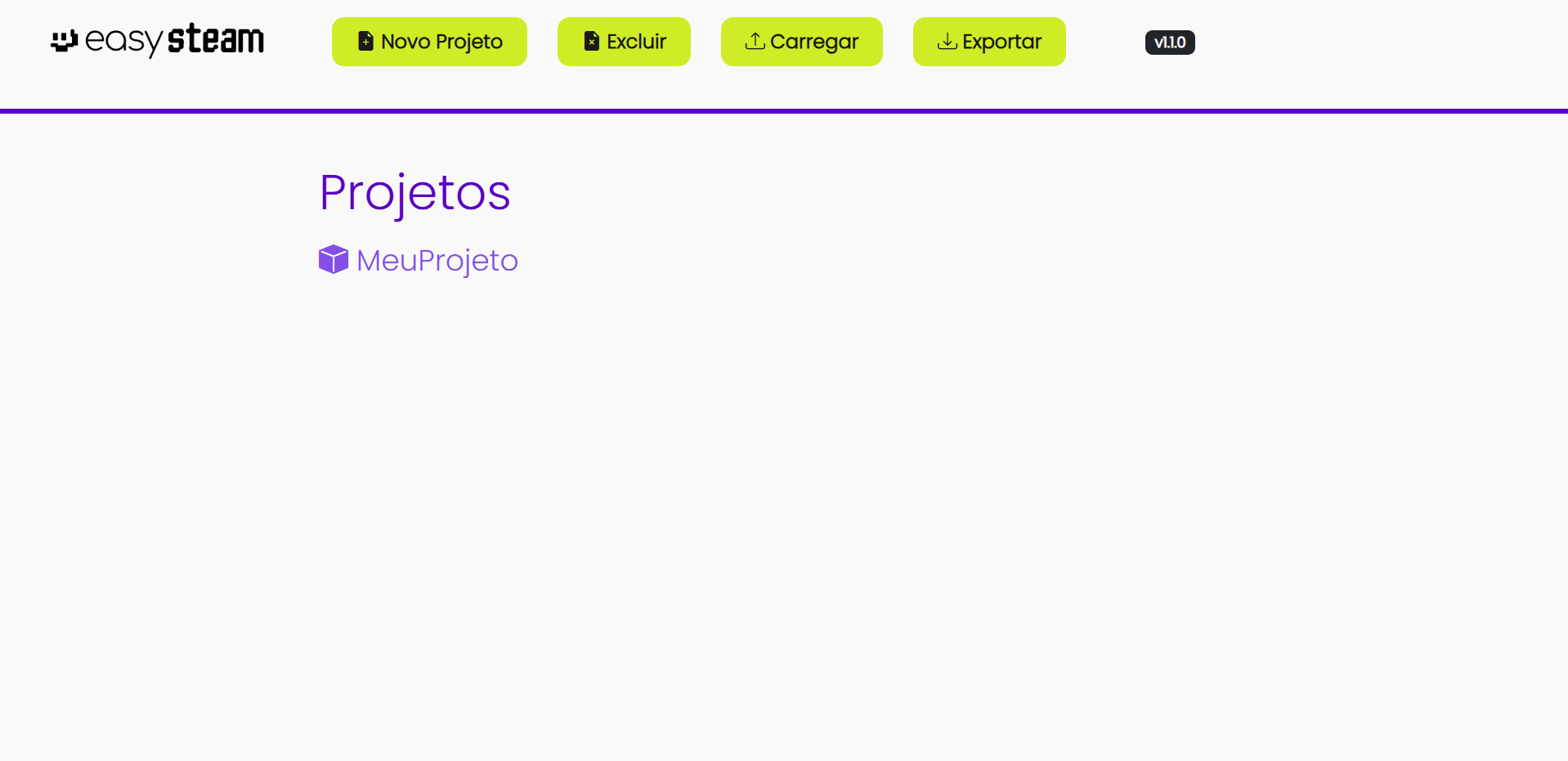
Caso tenha criado um projeto em texto, o projeto tera outro ícone.
Excluir
Quando este botão for clicado, uma caixa de seleção aparecera ao lado dos nomes dos projetos. Selecione os projetos que deseja excluir e clique no botão "Excluir selecionados".
Carregar
Utilize este botão para adicionar projetos externos.
Aceita somente projetos que foram exportados utilizando o botão "Exportar"
Exportar
Utilize este botão para fazer download de seus códigos no computador. É possível selecionar mais de um código simultâneamente.
Clique no botão "Exportar selecionados" para de fato exportar.
Ambiente em Blocos
Quando um projeto for aberto na página inicial (clicando com o botão esquerdo sobre o nome do código), a seguinte página deve surgir:
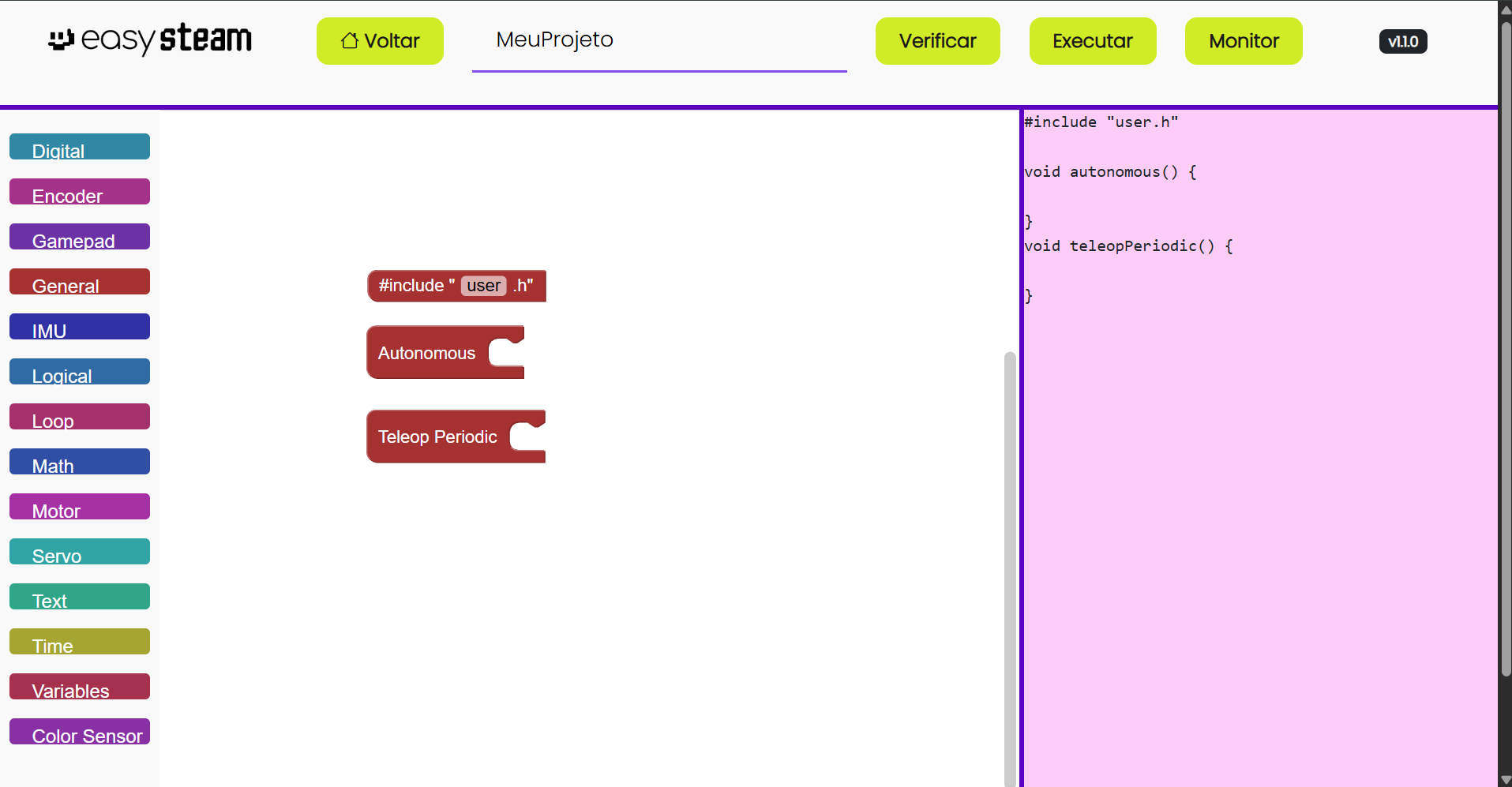
É possível separar a página em 4 locais distintos.
Categoria de blocos
Aqui ficam todos os blocos disponíveis para serem utilizados
Clique nas categorias para ver os blocos disponibilizados!
Área de trabalho
É a área em branco logo a direita da caixa de categorias.
Nessa página é possível perceber 3 blocos pré-definidos (não remova nenhum):
- Include
- Esse bloco inclui o código da biblioteca
- Autonomous
- Esse bloco opera apenas uma vez toda vez que o robô for habilitado.
- Teleop Periodic
- Esse bloco opera repetidamente durante a execução do robô.
Aqui os blocos podem ser colocados das categorias para fazerem parte do código!
Código gerado
O retângulo rosa é o código final gerado em texto, fundamentalmente, é o que opera na EasyBoard.
Coloque um bloco na área de trabalho e verifique o que acontece com essa janela.
Menu
Na aba de cima é possível visualizar botões, segue abaixo as descrições de cada um.
Voltar
Esse botão volta para página inicial.
Verificar
Quando clicado faz a compilação do código.
Executar
Tem a mesma funcionalidade do botão verificar, entretanto, o código depois de compilado é passado para a EasyBoard.
Monitor
Possibilita a leitura de valores por parte da placa. Caso a categoria texto seja usada para imprimir algum valor de sensor por exemplo, é com esse botão que veremos eles serem informados.
Texto
Criando uma programação de texto e selecionando-a (clicando com o botão esquerdo do mouse sob o nome do projeto), a seguinte página deve aparecer:
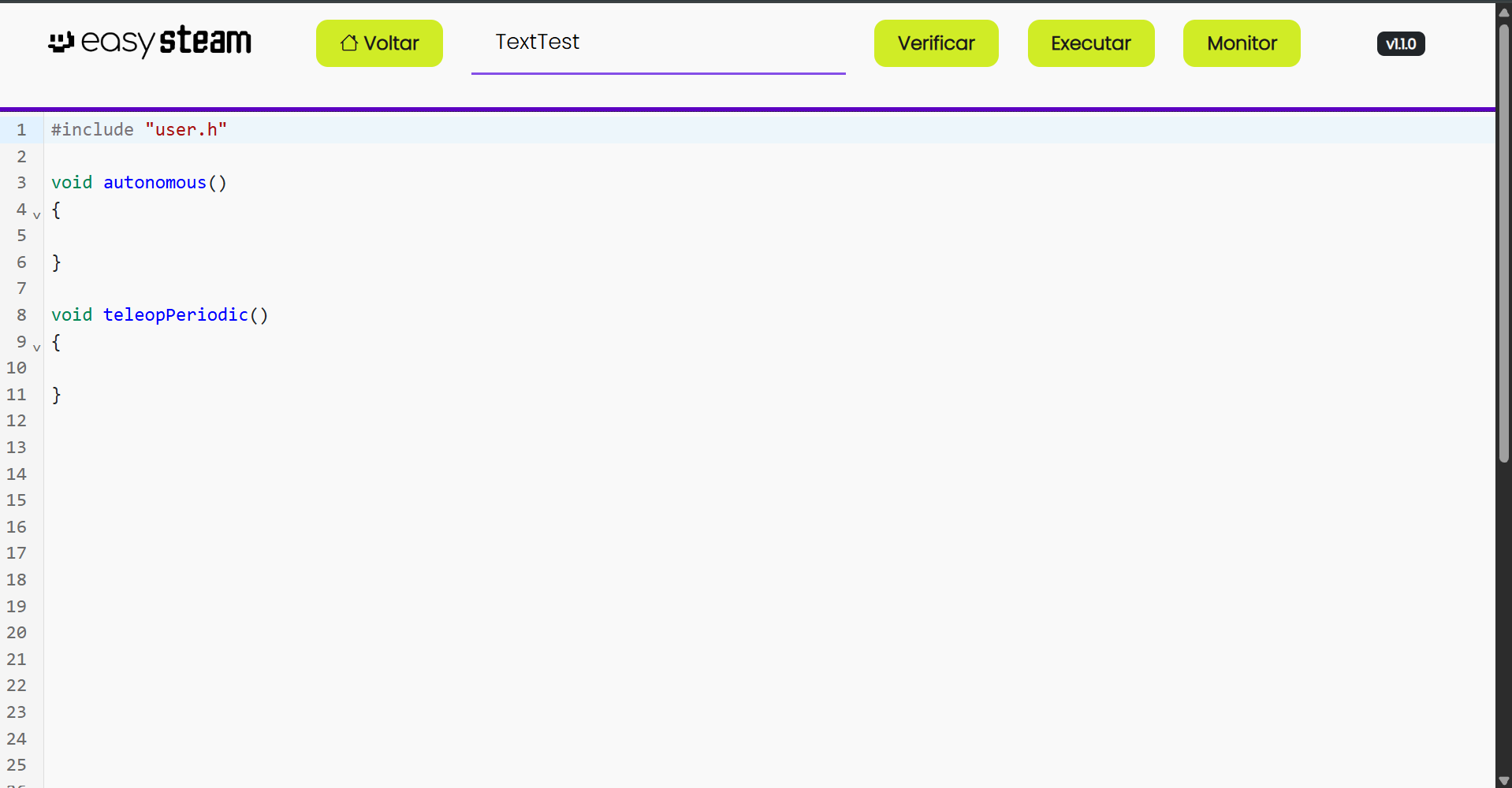
Essa página pode ser dividida em duas partes. Segue as descrições abaixo.
Área de trabalho
Aqui é onde escrevemos o código que será enviado para a placa.
Menu
Na parte superior da página temos 4 botões que facilitam o fluxo de trabalho. Seguem abaixo as descrições.
Voltar
Volta para a página inicial.
Verificar
Utilize este botão para fazer a compilação do código.
Executar
Tem a mesma função do botão verificar, mas após a compilação o código é passado para a EasyBoard (via USB).
Monitor
Utilize para visualizar os valores enviados pela placa.
LED status
A presente página tem como objetivo explicar os significados do LED embarcado na placa EasySTEAM.
Segue abaixo uma tabela relacionando as cores com os significados:
| Cor | Estado | Significado |
|---|---|---|
| Sólido | Driver Station conectada a placa | |
| Piscante | EasySTEAM sem Driver Station Conectada | |
| Sólido | Erro |
Controle
Mapa de valores
Antes de abordar o restante do hardware, como motores, servos, botões digitais e outros, é necessário conhecer sobre o controle (visto que maior parte da movimentação será com ele). Abaixo será mostrado uma tabela que mapeia os valores, dos botões e analógicos do gamepad.

Analógicos
| Nome | Eixo | Valores |
|---|---|---|
| Left Axis Y | Y | -1.0 a 1.0 |
| Left Axis X | X | -1.0 a 1.0 |
| Right Axis Y | Y | -1.0 a 1.0 |
| Right Axis X | X | -1.0 a 1.0 |
Botões
| Nome | Valores |
|---|---|
| Button A | false ou true |
| Button B | false ou true |
| Button Y | false ou true |
| Button X | false ou true |
Código
Objeto de controle
O objeto de controle é conhecido na interface como Gamepad1 - fica dentro da categoria Gamepad. Como demonstra:
Caso tenha tentado colocar ele dentro de setup ou loop perceberá que ele não se encaixa, a razão disso é que ele tem como objetivo retornar um valor - para outro bloco por exemplo, como será mostrado na seção seguinte.
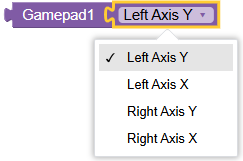
Eixos
Como mostrado nos mapas de valores, os eixos são blocos que retornam - portanto fornecem - um valor numérico para o bloco ao qual estão conectados. Em resumo, podemos escolher um eixo e acoplá-los ao objeto de controle.
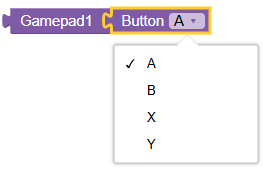
Botões
Diferente dos eixos que retornam valores numéricos, os botões fornecem os chamados valores booleanos, em resumo, verdadeiro ou falso. Eles serão usados junto com os blocos da categoria “Logical”, a qual será abordado nas seções posteriores.
Motores
Conexão elétrica
A presente seção tem como objetivo explicar a conexão elétrica dos motores, siga-a até o final caso queira movimentar o seu.
Cabos
A conexão elétrica dos motores é feita utilizando cabos com terminais JST-VH de 2 pinos.

Na parte de trás dos motores disponíveis existirá um terminal oposto que se encaixa no contato do cabo descrito.

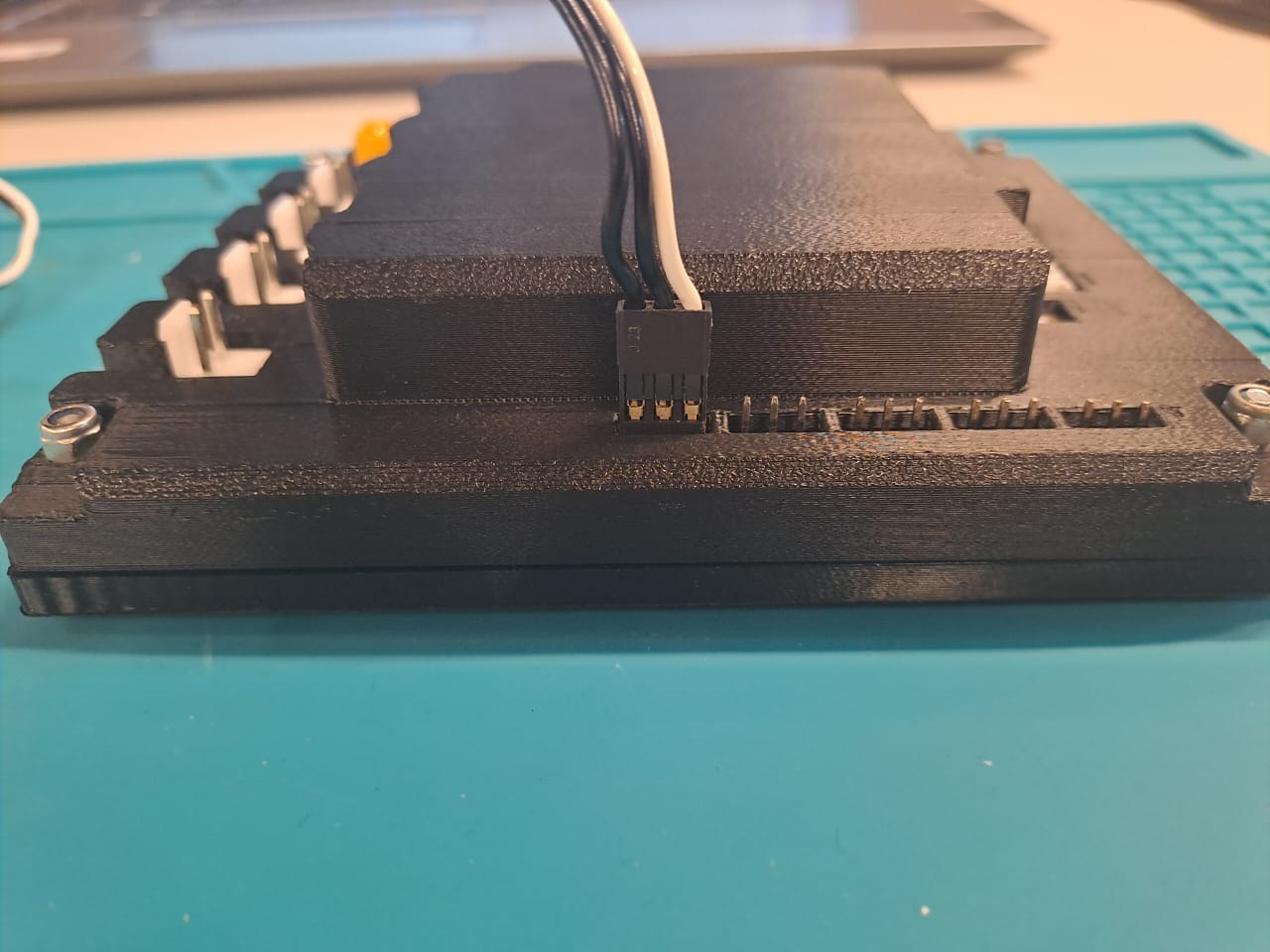
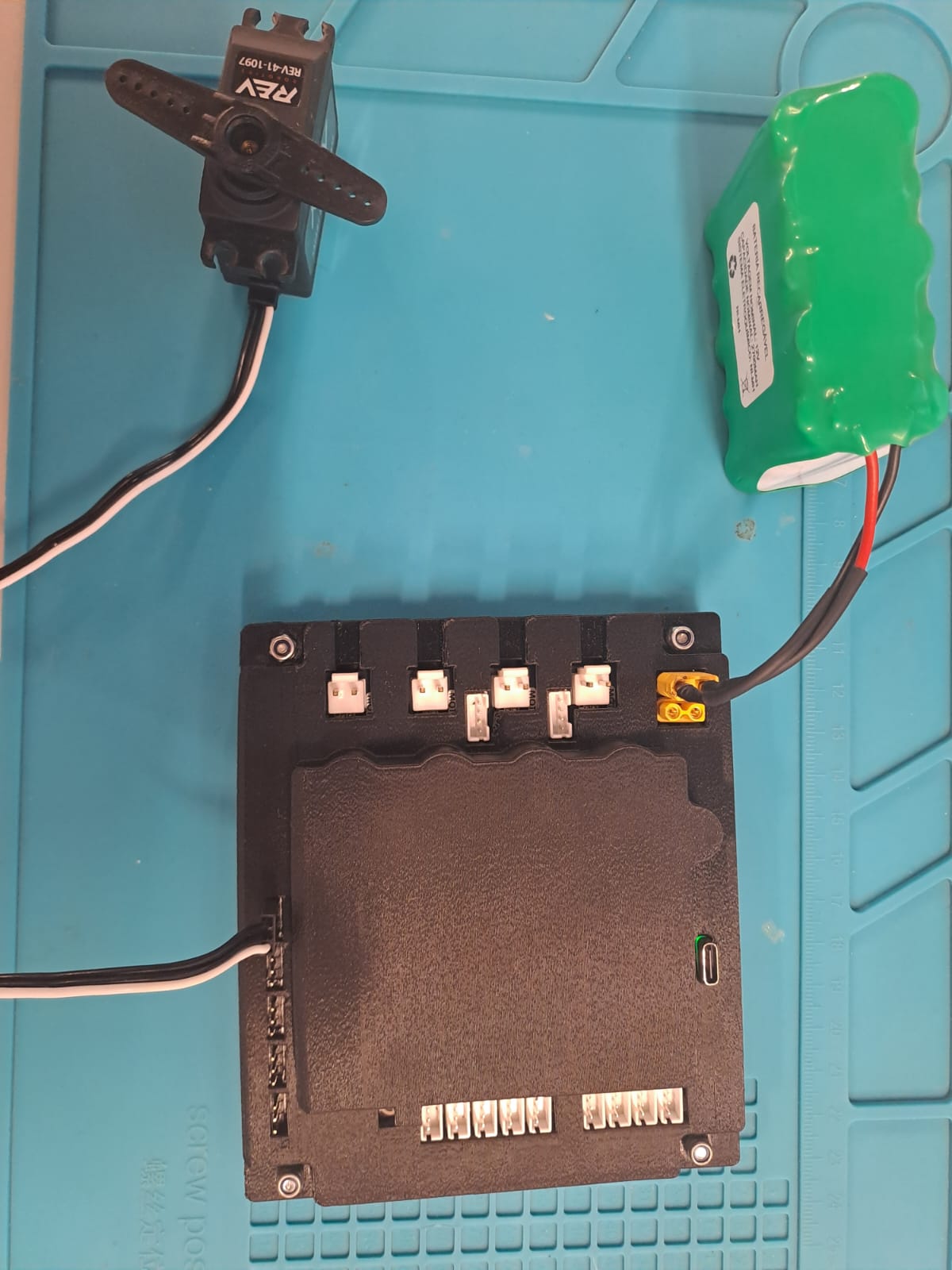
As portas correspondentes na placa EasySTEAM são as 4 que possuem esse mesmo contato, como mostrado abaixo:
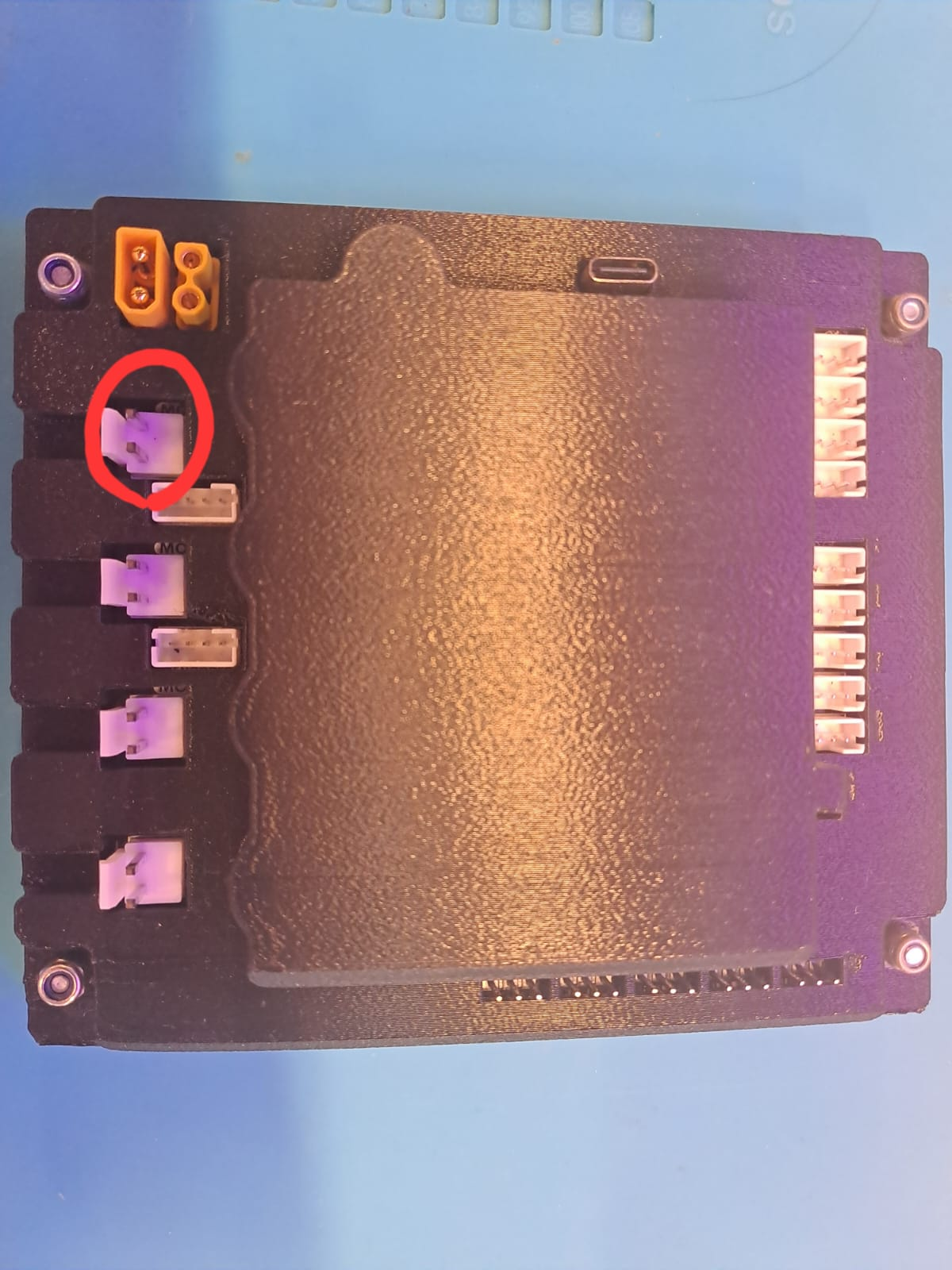
O terminal circulado indica a porta 1, então, de cima para baixo temos ainda, porta 2, 3 e 4. Essa diferenciação é importante quando o código for efetuado.
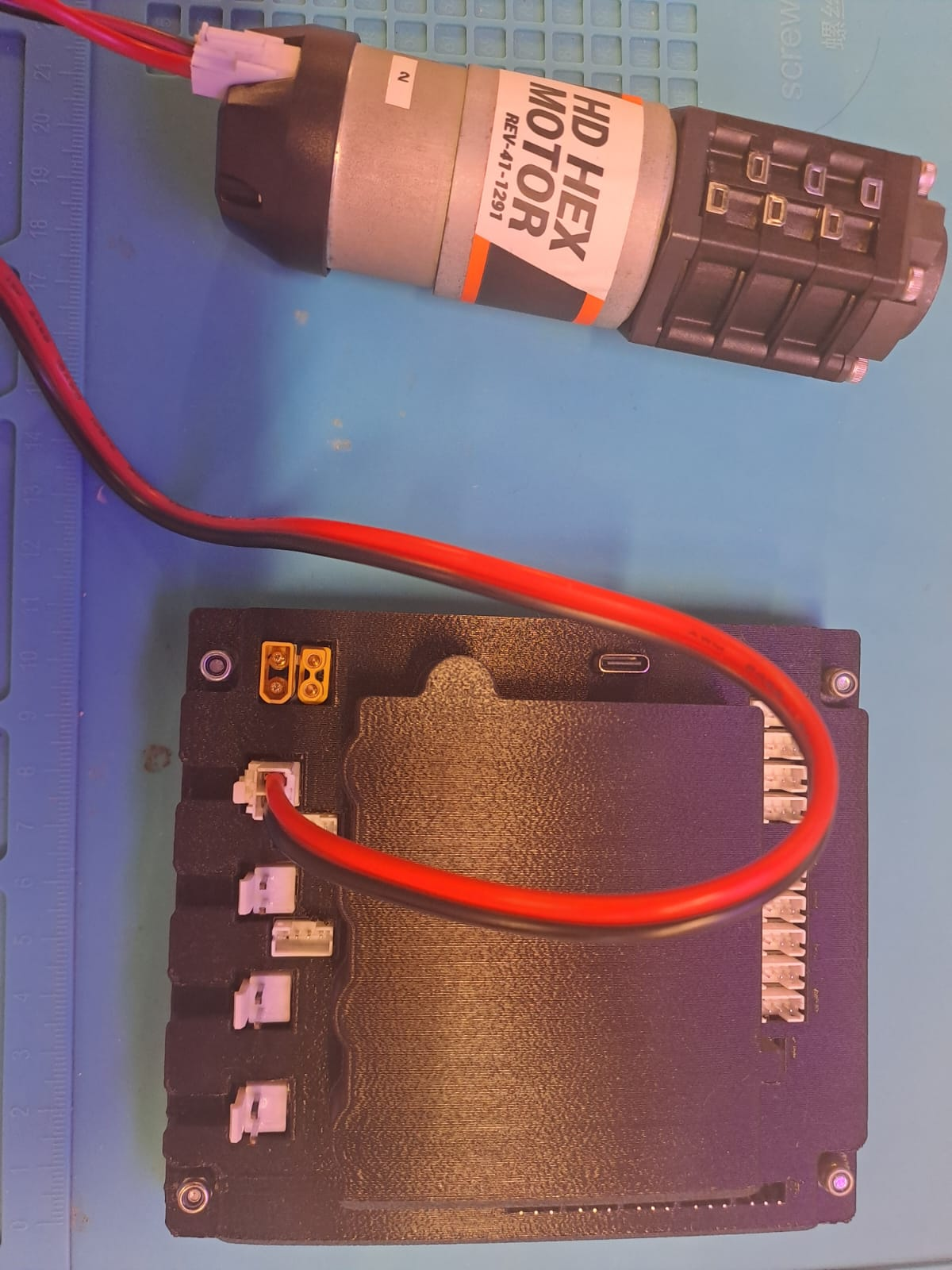
A última parte é apenas realizar a conexão do cabo com os dois terminais, como indicado:
As seguintes recomendações são feitas para aumentar a vida útil desses contatos JST-VH.

Alimentação
Os motores têm tensão elétrica de 12V, portanto, é necessário conectar a placa à uma bateria externa para movimentá-los. Isso é feito por meio dos conectores Xt30 presentes na placa - dois deles. Como segue:

Programação
O motor em si possui 2 blocos que podem ser utilizados - sendo um deles o próprio motor.
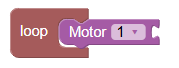
Objeto de motor
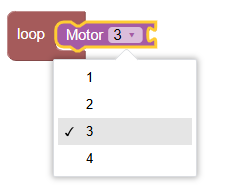
O bloco de motor é utilizado para indicar com qual porta estaremos trabalhando, por isso é preciso escolher ela do lado do objeto, como indicado.
Motor configurado para porta 1:
Motor configurado para porta 3 (com outras opções disponíveis):
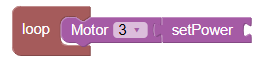
Bloco de potência
O bloco que faz com que o motor se movimente é o bloco setPower, o qual recebe como parâmetro um valor de -1.0 a 1.0. Ele funciona em combinação com o objeto de motor. Como demonstra a imagem abaixo:
Entretanto, como explicado no parágrafo anterior, é preciso passar um valor numérico para esse bloco, isso pode ser feito de dois modos. Passando uma constante por meio da categoria “Math” ou utilizando um valor dinâmico do controle - que será melhor explicado em outra seção.
Valor Constante
Como supracitado, é possível passar um valor numérico constante para o bloco setPower, como mostra:

Como pode ser um valor de -1.0 a 1.0 (valores maiores ou menores que os limites superiores e inferiores, respectivamente, serão cortados para 1.0, assim, -1.2 vira -1.0 e 1.2 vira 1.0), é possível colocar um valor fracionário e negativo, como:

Deve ser observado que o valor 1 tende a rotacionar o motor na velocidade máxima (100%), enquanto que um valor de 0.5 faz com que o motor gire na metade da velocidade total (50%). Caso seja colocado um valor negativo, a rotação se inverte.
Valor dinâmico
Para essa seção leia os trechos sobre controle e conceitos iniciais da biblioteca.
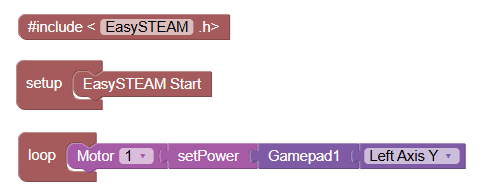
Como explicado na seção de conceitos iniciais da biblioteca, o bloco de loop opera repetidamente durante a execução do programa, é possível utilizar isso para atualizar periodicamente a saída do motor - visto que a cada momento é definido um valor novo para a porta. Para fazer isso, utilizamos o objeto de controle (Gamead na interface), como explicado anteriormente, os valores dos eixos dos analógicos variam de -1.0 a 1.0, portanto, é totalmente viável colocar a o valor de saída de um dos eixos dos analógicos diretamente na entrada do bloco setPower. Como demonstrado abaixo:4

Dessa forma, um código que rotacione um motor baseado no valor do eixo Y do analógico esquerdo do controle tem o seguinte formato:
Execução
Com a montagem e a programação feita já é possível controlar o motor. Veja a seção de Driver Station para entender como conectar o computador ao EasySTEAM de forma wireless.
Servos
Conexão elétrica
Os servos tem uma conexão simples, no sentido de que os cabos geralmente são integrados no corpo do hardware. Entretanto, é preciso ficar atento com o sentido da conexão, visto que é o único contato da placa que é possível inverter.
Assim o primeiro passo para conectar o servo é identificar três pinos:
- GND - Ground
- Vcc - Alimentação
- Signal - Sinal de controle
Existem cores padrões para certas fabricantes, mas na dúvida sempre cheque o manual dos equipamentos.
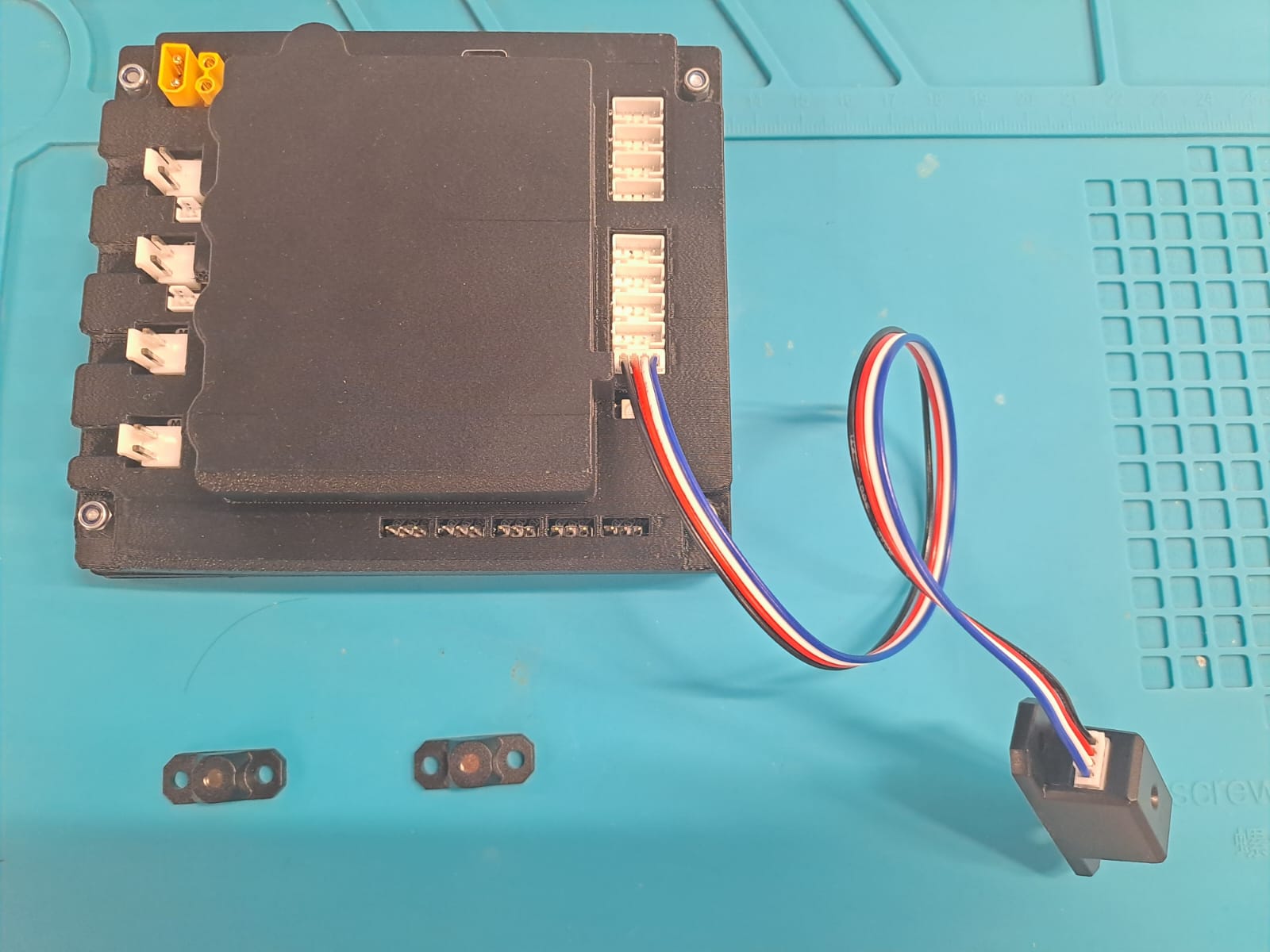
Nessa seção será utilizado um Smart Servo da REV Robotics
No Smart Servo, o cabo de sinal tem a coloração branca, o do meio é o Vcc e o restante é o GND. Como mostra a imagem abaixo:

Quanto a conexão na placa EasySTEAM, é necessário verificar quais pinos correspondem ao terminal de saída do servo - para não acabar invertendo sinal com GND por exemplo. Mas visto isso, já é possível conectar, como seguem as demonstrações abaixo:

Alimentação
Apesar de os servos atuarem com uma tensão elétrica de 5V, é recomendado que se tenha uma bateria de 12V conectada a placa - igual ao que foi feito para operar os motores - para não sobrecarregar todo o equipamento envolvido.
Programação
Com a conexão pronta é possível começar a programação do servo. Que consiste em 3 blocos (sendo um para servos contínuos)
Objeto do Servo
Assim como o objeto de motor - leia a seção de Motores, caso não tenha visto ainda - o servo tem um bloco semelhante, no qual podemos escolher quais dos 3 servos estaremos mexendo.
Bloco de posição
Diferente do motor em que definimos um percentual da velocidade de saída, os servos funcionam ditando uma posição (geralmente em graus). Dessa forma, o bloco tem o mesmo significado, ou seja, receber um valor numérico, mas esse valor pode ir de 0 a 270.
O programa não diferencia unidades, mas espera um certo tipo, então no caso dos servos, seria em graus.
Como demonstra:

Lógica
Em praticamente qualquer programa de computador é necessário tomar decisões, isso é feito utilizando condicionais, a mesma ideia é necessária ao utilizar essa interface e mecanismos.
As condicionais trabalham com lógica booleana, em resumo verdadeiro ou falso. Isso será melhor visto com a seção abaixo.
Bloco de comparação
Este bloco tem por objetivo fazer comparações númerias do tipo, 5 > 3 ou 4 > 5 - caso o resultado seja correto ele retorna verdadeiro, se não, falso.
Ele aceita como parâmetros dois tipos numérico que funcionam para a comparação. Como exemplo:

Esses números podem ser susbtítuidos por qualquer outro bloco que retorna um tipo numérico. Como o controle.
Operadores lógicos
Diferentes dos operadores numéricos que trabalham com números, esses trabalham com expressões de verdadeiro e falso. Para ver mais sobre o assunto acesse: Operadores lógicos
O bloco que opera com isso é o mostrado abaixo:
Diferente do bloco de comparação, ele recebe valores de verdadeiro e falso (booleanos). Então segue abaixo um exemplo usando o controle:

A expressão acima seria verdadeira caso qualquer um dos dois - ou mesmo os dois - botões estivessem pressionados, portanto, retornando uma instrução verdadeira
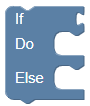
Bloco If do
Ainda dentro da categoria "Logical" é possível ver um bloco como o mostrado abaixo:

A ideia principal dele é: "Se esta expressão for verdadeira, faça isso". Para ele verificar a veracidade de algo é necessário uma condição - que em resumo é uma expressão que retorna falso ou verdadeiro.
E como dito nas seções acimas, essas expressões podem ser os operadores lógicos, comparadores numéricos, ou até mesmo os valores de botões do controle.
Bloco If Else
Esse bloco é semelhante ao bloco If, com a adição de uma condição "Se não", em resumo, "Se está expressão é verdadeira, faça isso, se não, faça aquilo".
Exercício
Nesta seção será demonstrado como usar a categoria "Logical" para fazer o acionamento de servos.
A ideia principal do programa que será desenvolvido nesta página é:
- Se o botão A for apertado o servo deve girar até 90º;
- Se o botão X for apertado o servo deve girar até 180º;
- Se o botão B for apertado o servo deve girar até 270º;
- Se o botão Y for apertado o servo deve girar até 0º.
Sinta-se a vontade para experimentar outras lógicas, como: Se o botão X for apertado juntamente com o botão B faça isso. A ideia dos exercícios é aprender sobre a implementação de um conjunto de categorias.
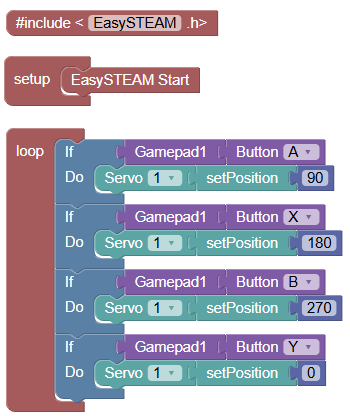
O que o código faz é checar qual dos 4 botões está pressionado, sendo que, cada um ao ser apertado define uma posição para o servo.
Faça o carregamente do código para a placa, conforme descrito nos capítulos iniciais, e TESTE!
Sensores Digitais
Conexão elétrica
As conexões de sensores digitais é feita utilizando cabos JST-pH de 4 pinos, conforme imagem:

Esses contatos encaixam em apenas um sentido, portanto não é possível inverter a conexão.
Nesta página será utilizado um sensor de limite magnético, segue a imagem abaixo mostrando a conexão do cabo JST-PH com o sensor:

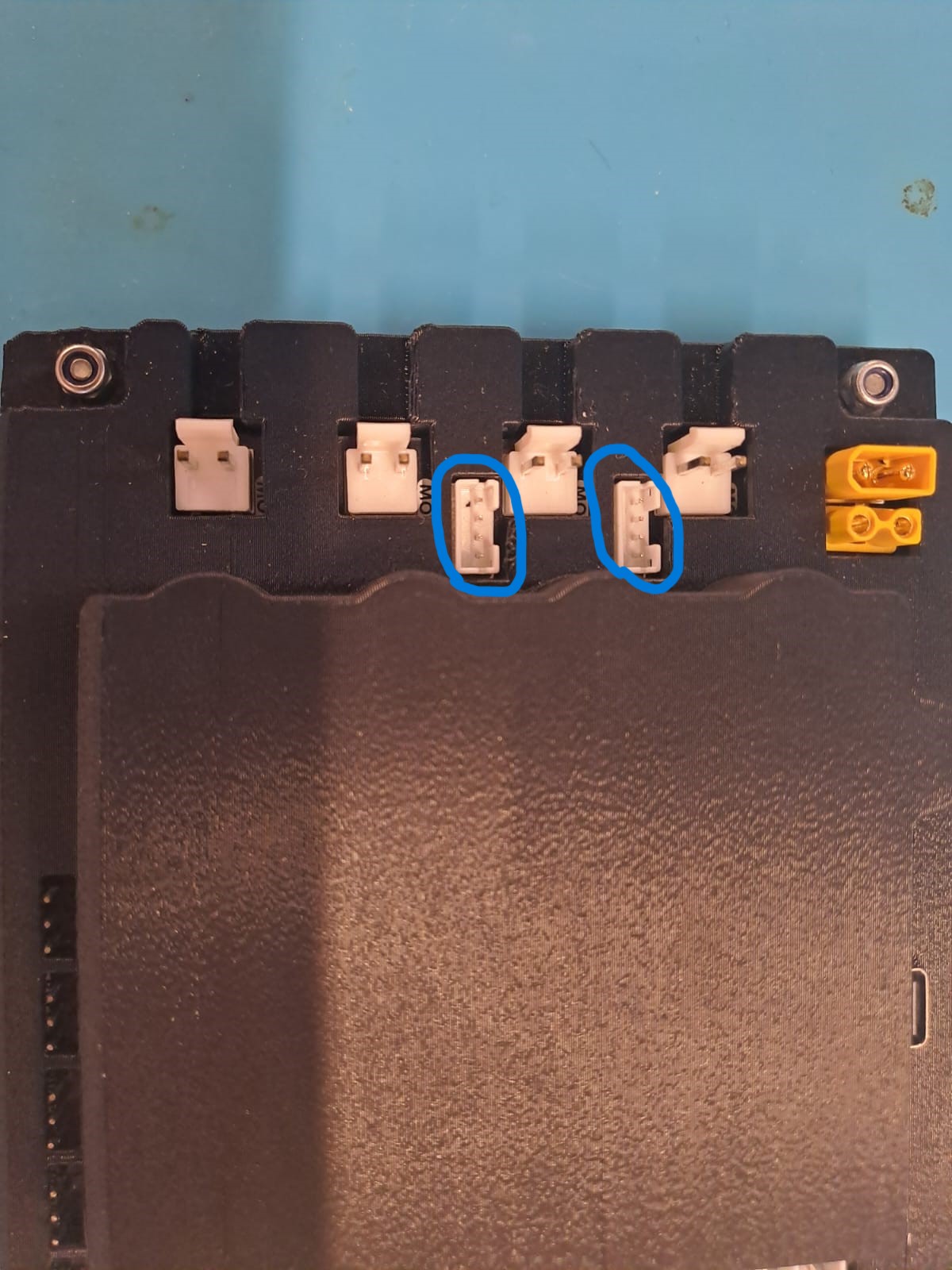
As conexões correspondentes na placa EasySTEAM estão indicadas abaixo:

Considerando uma ordem da direita para a esquerda, temos a porta Digital 1, 2, 3, 4 e 5. É importante diferenciar qual estamos usando por causa do código mostrado posteriormente
Segue abaixo uma imagem mostrando a conexão geral do sensor:
Aqui o sensor foi conectado na porta 5, mas nos exemplos seguintes estaremos usando a porta 1.
Categoria Digital
A categoria digital é talvez a mais fácil de utilização, visto que são apenas dois blocos, um objeto e um que retorna uma expressão boolean (veja a seção Lógica)
Objeto digital
O objeto de sensor digital é semelhante aos blocos de motores e servos, no sentido de que eles são colocados na Área de trabalho e é fornecem uma porta que pode ser escolhida.

Bloco de input
Esse bloco tem como objetivo retornar o valor que o sensor está no momento. No caso de um sensor de limite (como o usado nesse capítulo), se um objeto está dentro do alcance, ele retorna verdadeiro, se não, falso.

Esses blocos são muito utilizados juntamente da categoria "Logical", portanto, dê uma olhada no capítulo do servo para entender de que forma isso é possível.
Veremos nas páginas seguintes a forma de se trabalhar com essa categoria.
Categoria Text
Geralmente, quando um código é feito, é interessante e desejável gravar a saída dele para que se possa entender o que está acontecendo - esteja funcionando (ou não).
Para fazer isso, dentro da interface foi criado uma categoria para mostrar mensagens no monitor serial, que é a categoria desta página.
Inicializando o monitor serial
Apesar de o monitor serial ser parte da interface, é preciso informar a placa EasySTEAM que é desejado abrir uma comunicação com ela. Isso é feito da forma demonstrada abaixo:
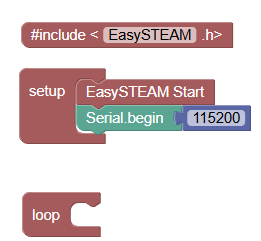
Utilizamos para iniciar a comunicação dois blocos, os quais são encontrados na categoria "Math" e "Text", em resumo, o número 115200 indica que o objetivo é abrir uma comunicação com a placa. Entender o que exatamente faz o número 115200 é um conteúdo mais difícil, que não será abordado nesse documento, mas uma explicação pode ser obtida no seguinte documento: Comunicação Serial
Mostrando mensagens
Para imprimir mensagens no monitor serial utilizamos algum dos seguintes blocos:
Esses blocos aceitam como argumento a maioria dos tipos que a interface possui.
Na página seguinte mostraremos como utilizar essa categoria juntamente da "Digital".
Exercício
Leia a seção Lógica antes fazer esse exercício.
A ideia principal desta página é executar um código que faça o seguinte:
- Receba o estado do sensor de limite magnético;
- Imprima no monitor serial se estiver pressionado ou solto.
O seguinte código pode ser feito para testar o sensor:
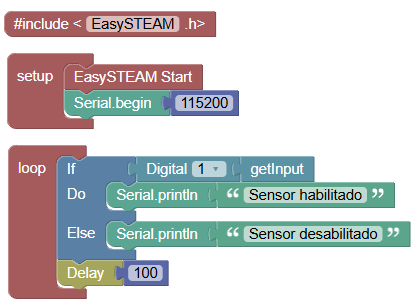
Adicionei o delay apenas para ficar mais legível, em uma montagem que não usa monitor serial não é necessáruio utilizar esse função, a qual simplesmente paralisa o código durante uma certa quantidade de milisegundos.
Caso você tenha feito o código, foi possível perceber que ele informa que o "Sensor está habilitado" quando o imã não chegou perto do sensor - o que era para na perpesctiva do usuário ser "desabilitado". Em resumo, está invertido, e porque isso ocorre? Como supracitado ao longo de todo documento, condicionais trabalham com verdadeiro e falso, e do ponto de vista do sensor o falso é quando ele é acionado - isso pode ser melhor visto nos diagramas de montagem dos sensores.
Assim, a solução esperada é inverter - ou melhor, negativar - essa expressão, isso pode ser feito utilizando o operador NOT presente na categoria "Logical"
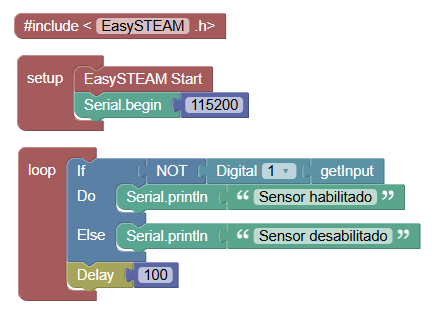
Resultado: o código acima funciona perfeitamente.
Encoder
Conexão elétrica
Encoder é um sensor que fornece a posição angular do motor ao qual está conectado - veja mais em: Encoders
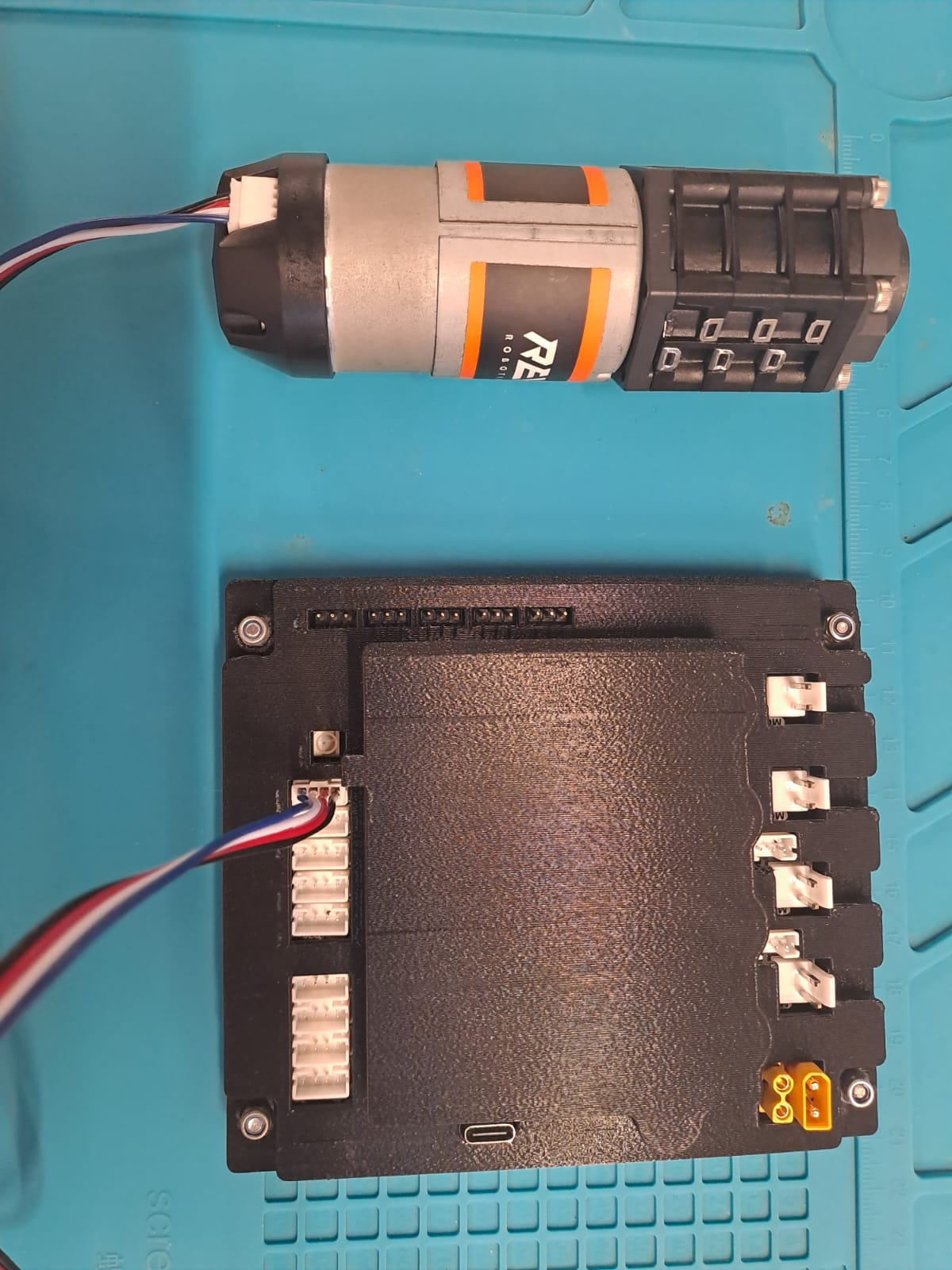
A presente seção tem como objetivo explicar a utilização desse sensor com aplicação nos motores - será usado um HD Hex com ultraplanetária 60:1.
Cabos
Visto que o encoder é um sensor digital - veja a seção Conexão elétrica para sensores digitais - o cabo que ele usa é o padrão JST-PH de 4 pinos.
Conexão no Motor
Uma das pontas do cabo é conectado diretamente ao motor, na entrada correspondente - como indicado:

Conexão placa
A ponta restante é conectada a placa nas entradas mostrados abaixos:
Conexão geral
Conectado os dois deve ficar da seguinte forma:
É interessante pensar que o motor e o encoder são dispositivos separados, tanto é que, o motor funciona com 12V, enquanto o encoder pode ser energizado apenas pelos 5V da conexão USB-C, portanto, nos testes seguintes não será utilizado bateria
Categoria motor
O encoder trabalha juntamente com a categoria de motor.
Objeto do encoder
O objeto de encoder é semelhante aos outros objetos descritos neste documento - uma diferença é que como ele não é um acionador, sua função é retornar um valor.
Bloco de posição
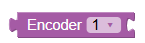
O seguinte bloco retorna a posição angular do motor especificado pela porta do encoder.

Nesse exemplo, o encoder retorna a posição angular do motor 1
Bloco de reset
O seguinte bloco tem como objetivo zerar a contagem atual do encoder.

Existem outros blocos de encoder que não serão abordados neste documento
A próxima página tem como objetivo ensinar a utilização da categoria de variáveis.
Categoria de variáveis
Na grande maioria dos códigos é importante salvar os valores que os blocos retornam, isso pode ser feito utilizando a categoria de variáveis - que será explicado abaixo.
Blocos de tipos
Os chamados tipos indicam quais espécies de valores podem ser armazenados nessas variáveis, como: ponto flutuante, inteiro ou texto. Veja mais em: Data types

Bloco de nome
Para criar uma variável é preciso escolher um nome para ela juntamente do tipo de valores que devem ser armazenados. Segue abaixo um exemplo de criação de variável:
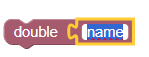
Esse é o nome padrão da variável, o qual deve ser mudado, para fazer isso apenas clique com o botão esquerdo sobre o texto e digite o novo nome.
Como:

Definir um valor
Para definir um valor se usa o bloco set, exemplo abaixo:

Para definir um valor é preciso declarar a variável antes, se não é gerado um erro de compilação.
Retorno de valor
Para retornar o valor de um bloco é necessário usar somente o bloco de nome, como demonstra:
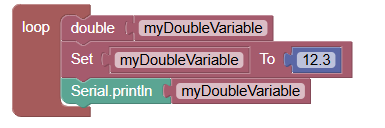
O valor mostrado no monitor deve ser 12.3
Exercício
A presente seção tem como objetivo fazer um código que realize o seguinte:
- Retorna o valor do encoder para uma variável;
- Divide a variável por um valor arbitrário - você escolhe;
- Mostra o valor no monitor serial.
O seguinte exercício pode ser feito da forma mostrada abaixo:
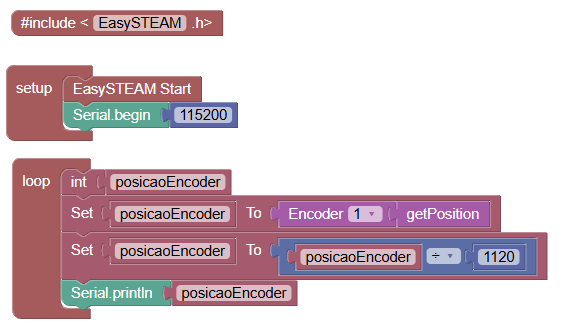
1120 é considerado uma volta completa de um motor HD Hex 40:1, portanto, se esse motor fosse utilizado o código acima mediria o número de voltas.
Verifique no monitor serial a saída do código executado acima.
IMU
Categoria IMU
IMU é um dispositivo de medição inercial, em resumo, é capaz de fornecer a posição angular da placa em 3 eixos diferentes, veja mais sobre em: IMU
Diferente dos outros equipamentos, ele é integrado na placa EasySTEAM, portanto, pode ser usado diretamente.
A presente página tem como objetivo explicar os blocos da categoria IMU.
Inicializar IMU
Esse bloco deve ser colocado na função setup para inicializar o dispositivo.

Não se esqueça de colocar essa função caso queira utilizar o IMU - se não ele não será capaz de fornecer os valores dos eixos
Objeto de IMU
O Objeto abaixo tem a mesma função dos outros dispositivos, retornar os blocos que podem ser utilizados para esse equipamento específico.

Retorno de Yaw
O Yaw é um dos eixos de giro da placa - pense em uma linha saindo para cima da placa e a mesma girando em torno dela, o presente bloco retorna a quantidade desse giro em graus.
Exercício
A presente seção tem como objetivo fazer uma leitura do IMU integrado.
Segue abaixo um código que faça isso:

Faça o código e veja a saída no monitor serial, como mostrado abaixo.