Encoder
Conexão elétrica
Encoder é um sensor que fornece a posição angular do motor ao qual está conectado - veja mais em: Encoders
A presente seção tem como objetivo explicar a utilização desse sensor com aplicação nos motores - será usado um HD Hex com ultraplanetária 60:1.
Cabos
Visto que o encoder é um sensor digital - veja a seção Conexão elétrica para sensores digitais - o cabo que ele usa é o padrão JST-PH de 4 pinos.

Conexão no Motor
Uma das pontas do cabo é conectado diretamente ao motor, na entrada correspondente - como indicado:

Conexão placa
A ponta restante é conectada a placa nas entradas mostrados abaixos:
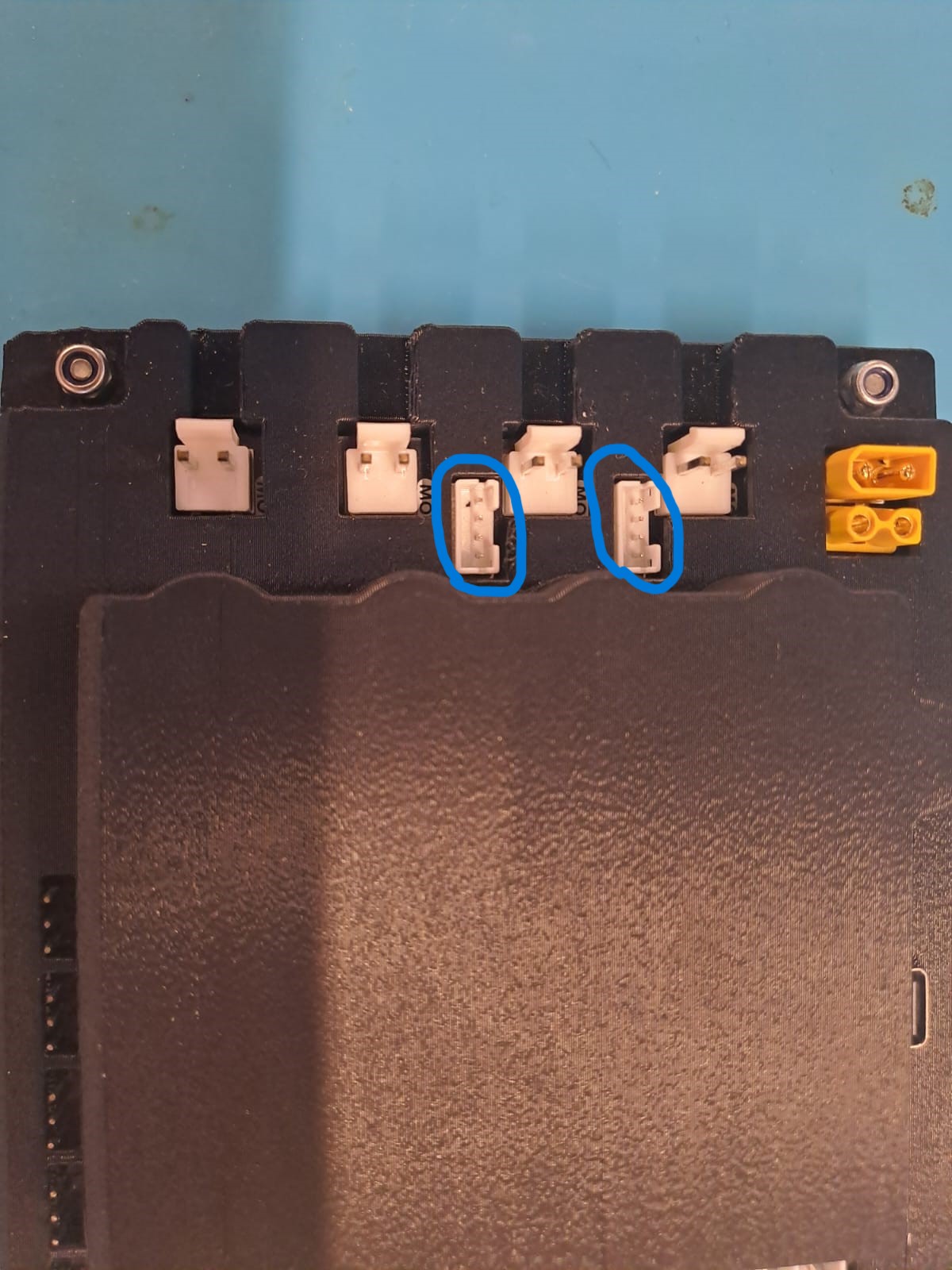
Conexão geral
Conectado os dois deve ficar da seguinte forma:
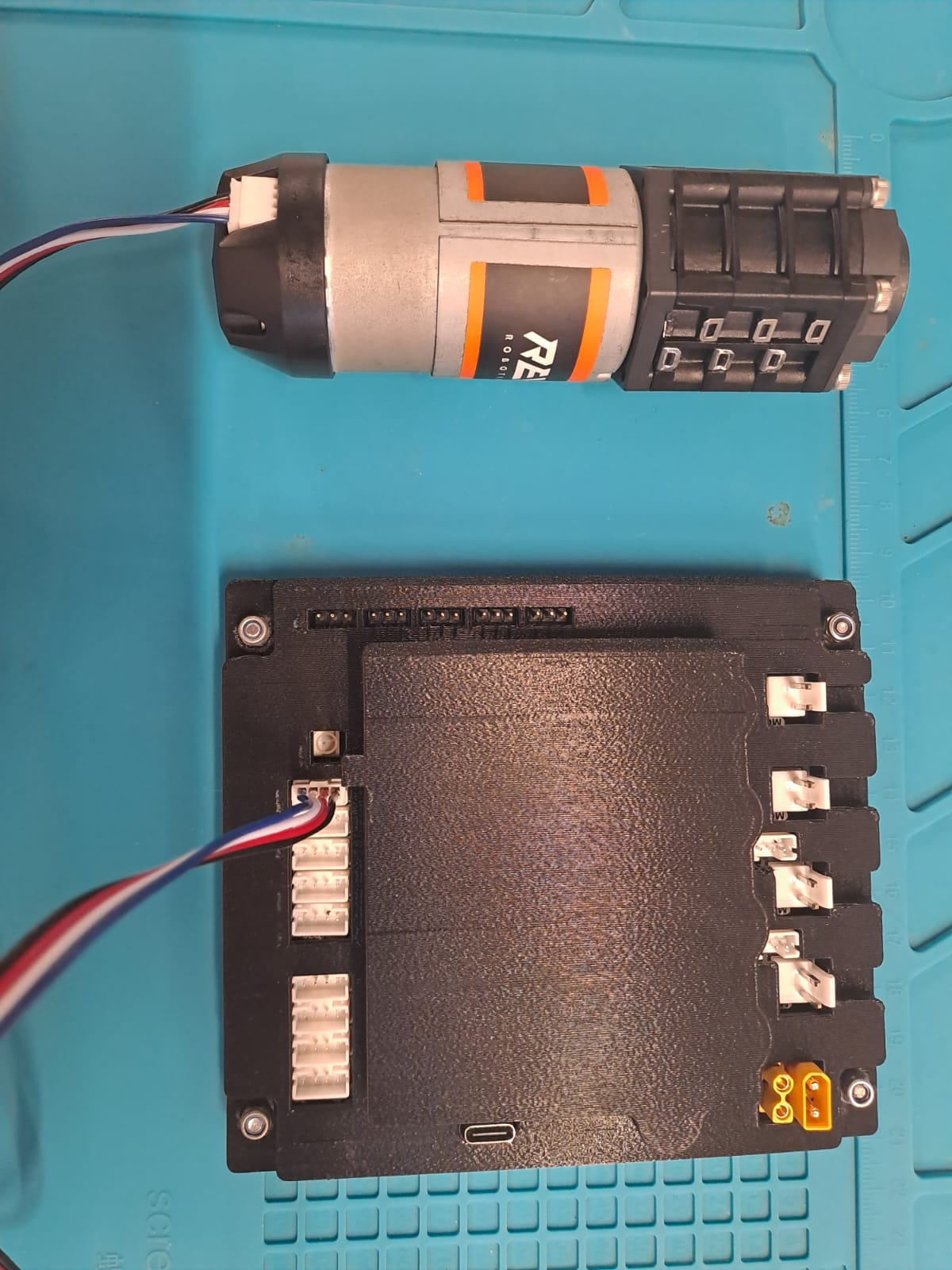
É interessante pensar que o motor e o encoder são dispositivos separados, tanto é que, o motor funciona com 12V, enquanto o encoder pode ser energizado apenas pelos 5V da conexão USB-C, portanto, nos testes seguintes não será utilizado bateria
Categoria motor
O encoder trabalha juntamente com a categoria de motor.
Objeto do encoder
O objeto de encoder é semelhante aos outros objetos descritos neste documento - uma diferença é que como ele não é um acionador, sua função é retornar um valor.
Bloco de posição
O seguinte bloco retorna a posição angular do motor especificado pela porta do encoder.

Nesse exemplo, o encoder retorna a posição angular do motor 1
Bloco de reset
O seguinte bloco tem como objetivo zerar a contagem atual do encoder.

Existem outros blocos de encoder que não serão abordados neste documento
A próxima página tem como objetivo ensinar a utilização da categoria de variáveis.
Categoria de variáveis
Na grande maioria dos códigos é importante salvar os valores que os blocos retornam, isso pode ser feito utilizando a categoria de variáveis - que será explicado abaixo.
Blocos de tipos
Os chamados tipos indicam quais espécies de valores podem ser armazenados nessas variáveis, como: ponto flutuante, inteiro ou texto. Veja mais em: Data types

Bloco de nome
Para criar uma variável é preciso escolher um nome para ela juntamente do tipo de valores que devem ser armazenados. Segue abaixo um exemplo de criação de variável:
Esse é o nome padrão da variável, o qual deve ser mudado, para fazer isso apenas clique com o botão esquerdo sobre o texto e digite o novo nome.
Como:

Definir um valor
Para definir um valor se usa o bloco set, exemplo abaixo:

Para definir um valor é preciso declarar a variável antes, se não é gerado um erro de compilação.
Retorno de valor
Para retornar o valor de um bloco é necessário usar somente o bloco de nome, como demonstra:
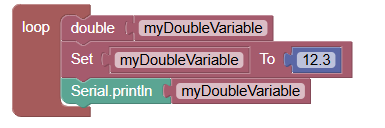
O valor mostrado no monitor deve ser 12.3
Exercício
A presente seção tem como objetivo fazer um código que realize o seguinte:
- Retorna o valor do encoder para uma variável;
- Divide a variável por um valor arbitrário - você escolhe;
- Mostra o valor no monitor serial.
O seguinte exercício pode ser feito da forma mostrada abaixo:
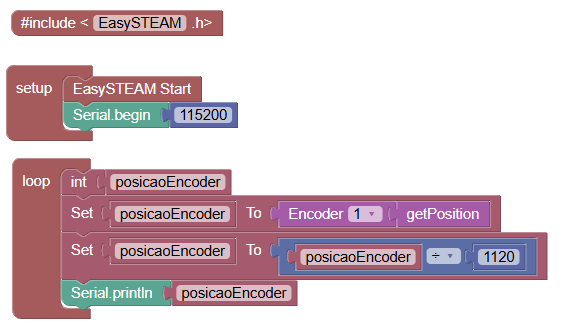
1120 é considerado uma volta completa de um motor HD Hex 40:1, portanto, se esse motor fosse utilizado o código acima mediria o número de voltas.
Verifique no monitor serial a saída do código executado acima.