
Usaremos ao longo desse livro o termo SRS para nos referirmos a "Servo robô inteligente", é a sigla usada para denominar o termo "Smart Robot Servo" (SRS)
O REV Robotics Smart Robot Servo (SRS) (REV-41-1097) é um servo com engrenagens de metal configurável que elimina a incerteza na hora de alinhar e ajustar mecanismos baseados em servo. Um SRS pode ser usado como um servo angular padrão, um servo angular personalizado e um servo de rotação contínua, bastando alterar suas configurações.
É o servo o atuador adequado para o seu mecanismo? Consulte a seção "Escolhendo um Atuador" da REV Robotics para saber mais.
## **Modos operacionais** Pronto para uso, o SRS opera como um servo de 270°. No entanto, o Programador SRS da REV pode reconfigurar o SRS para definir limites angulares ou alterná-lo para um modo de rotação contínua.Para obter mais informações sobre como usar o programador SRS para alterar os modos do servo, consulte a seção "Programador SRS".
### **Modo padrão** A faixa padrão para o SRS é de 270°. Essa faixa é mapeada para uma faixa de pulso de entrada de 500μs a 2500μs, com 1500μs como ponto central. A imagem abaixo descreve a relação entre pulso e ângulo.
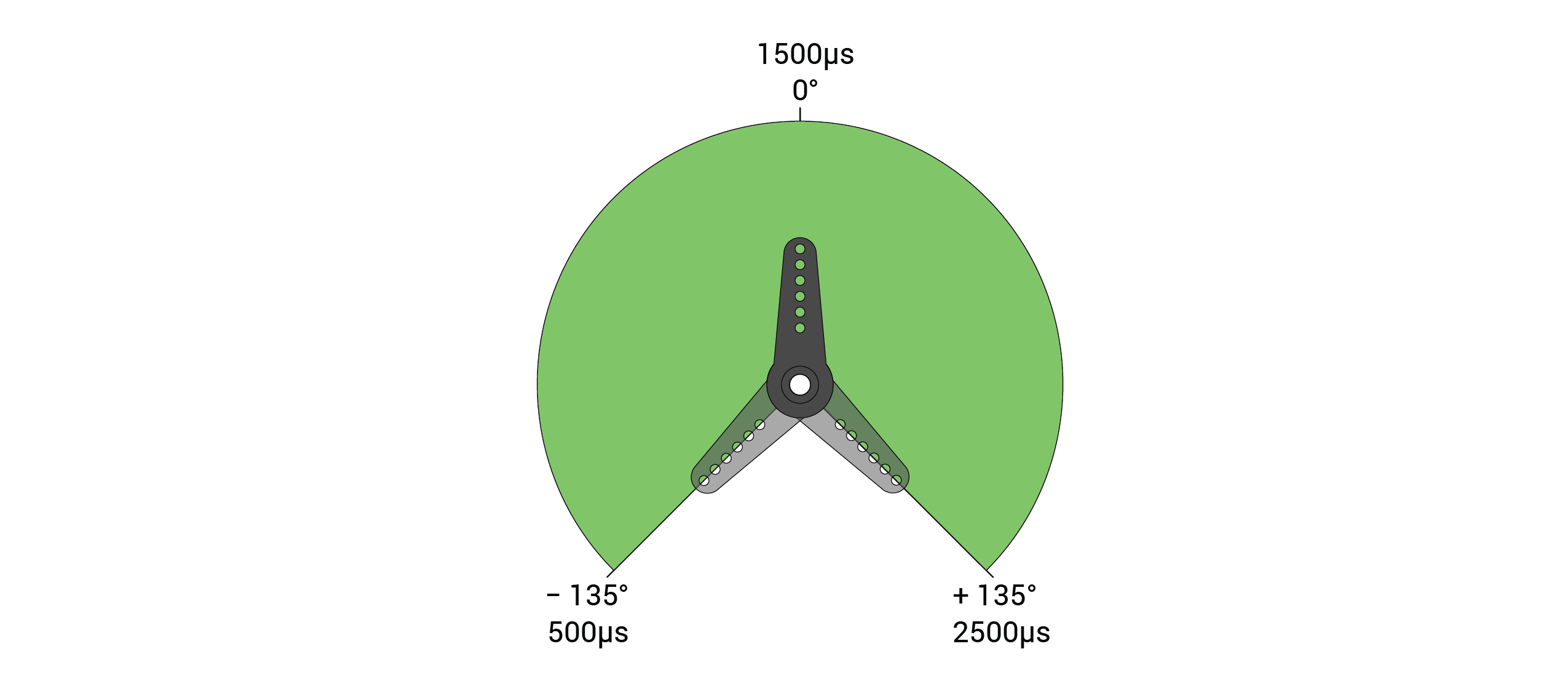
Tamanho do puldo é abreviado como PW (Pulse Width)
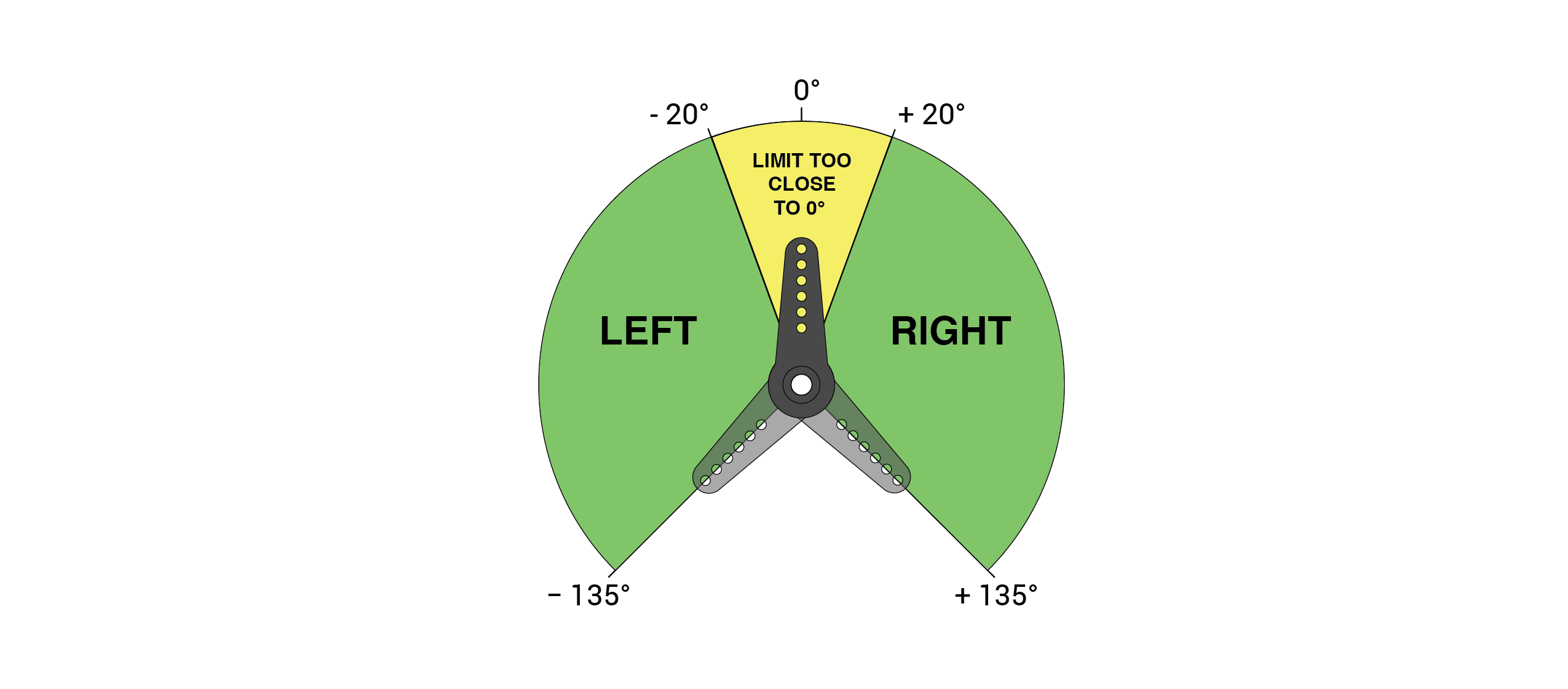
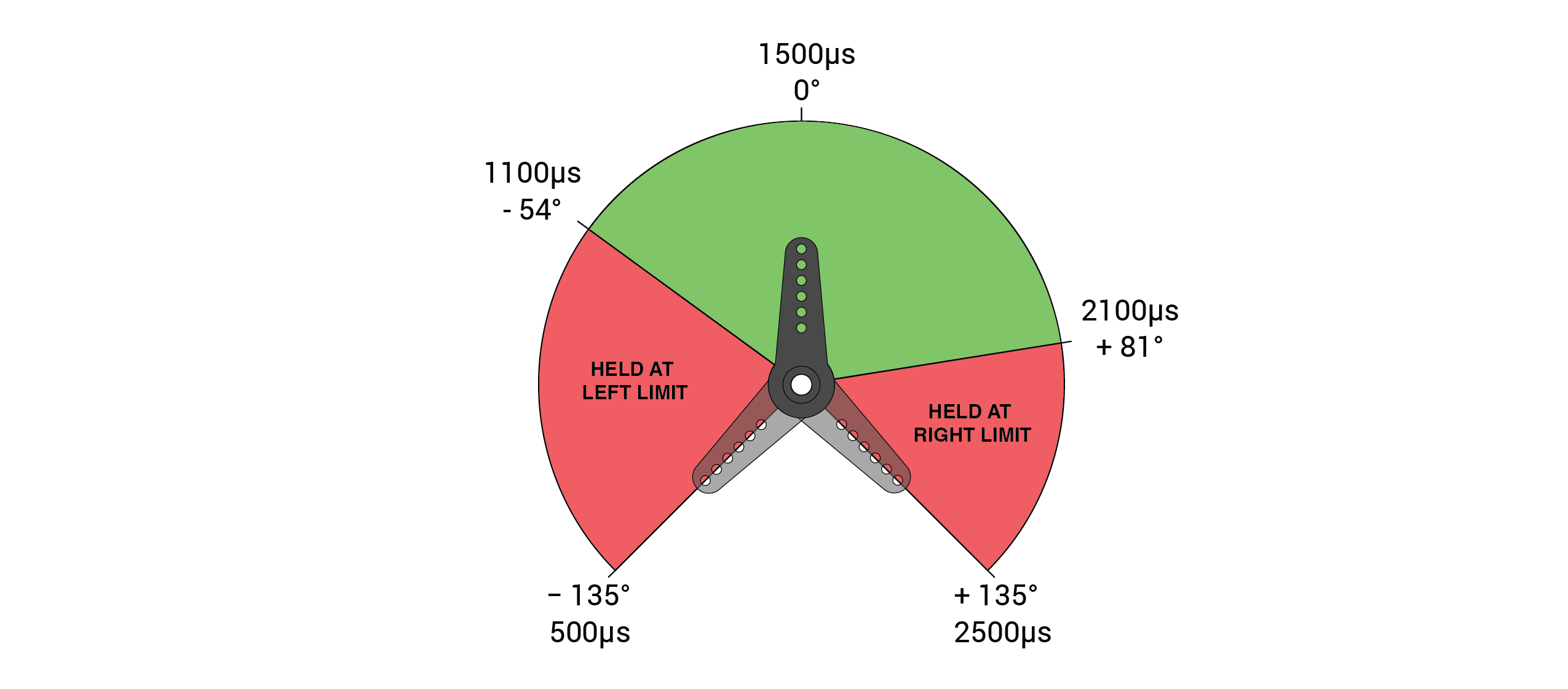
| Tamanho do pulso (us) | 500 | 500 < PW < 1500 | 1500 | 1500 < PW < 2500 | 2500 | | --- | --- | --- | --- | --- | --- | | Direção | Horário | Horário | Parado | Anti-horário | Anti-Horário | Velocidade | Máxima | Proporcional | Parado | Proporcional | Máxima | ### **Limites angulares** O SRS pode ser facilmente configurado com o Programador SRS para limitar os movimentos para a direita e para a esquerda em dois ângulos definidos pelo usuário. Pulsos de entrada que ocorrem além dos limites serão ignorados, e o SRS manterá o ângulo limite. Qualquer dois ângulos podem ser definidos como limites, desde que o limite esquerdo esteja à esquerda da faixa morta central e o limite direito esteja à direita da faixa morta central. A tabela abaixo mostra as regiões válidas para os limites esquerdo e direito.
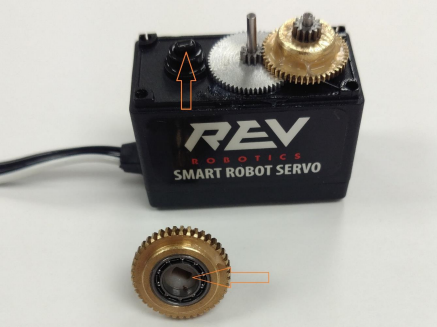
As engrenagens de reposição são enviadas sem graxa. Elas precisam de graxa para funcionar suavemente, portanto, certifique-se de que haja graxa suficiente na caixa de engrenagens e, se não houver, adicione uma quantidade equivalente a uma esfera de ~1/4" de diâmetro de graxa às engrenagens na caixa de engrenagens.
## **Passo a passo substituindo as engrenagens** ### **Passo 1** Remova os 4 parafusos que seguram a caixa superior.








SRS é uma cigla para "Smart Robot Servo", manteremos a cigla mesmo que o significado esteja em inglês. Mas saiba que significa Servo Robô Inteligente.
## **Noções básicas do SRS** O Programador SRS da REV Robotics (REV-31-1108) é a chave para desbloquear todas as funcionalidades inteligentes do Smart Robot Servo (SRS) (REV-41-1097). Alternar entre os modos de rotação contínua, servo padrão e angular personalizado é tão fácil quanto apertar um botão. O Programador SRS não apenas programa o SRS, mas também atua como um testador de servo independente para qualquer servo RC padrão.  ### **Especificações do produto** O programador SRS possuí as seguintes características: - 3 modos de programação - Rotação contínua - Limites Angulares - Resetar para o padrão de fábrica - Modo de teste - Varredura automática - Posição/Direção manual - Operação intuitiva com estado de LED. - Autoalimentado - Lembrete de desligamento #### **Especificações Mecânicas**| Descrição | Valores |
|---|---|
| Dimensões | 70,5mm x 64,5mm x 35,5mm |
| Peso |
| Descrição | Valor |
|---|---|
| Alimentação | 4 pilhas AA |
| Saída | 6V nominal |
| Nível Lógico (saída) | 3,3V |
| Faixa do pulso de saída | 550us - 2450us |
| Pulso médio | 1500us |
Antes de usar o Programador SRS para alternar modos ou programar o seu servo motor, verifique se as baterias não estão descarregadas. Se o seu Programador SRS não foi usado por um tempo, coloque um conjunto de baterias novas para evitar a possível corrupção do firmware do seu servo motor.
### **Trocar os modos** Siga as etapas abaixo para alternar um REV Smart Robot Servo entre o Modo Contínuo e o Modo Servo. A figura abaixo mostra o processo para selecionar o Modo Contínuo. 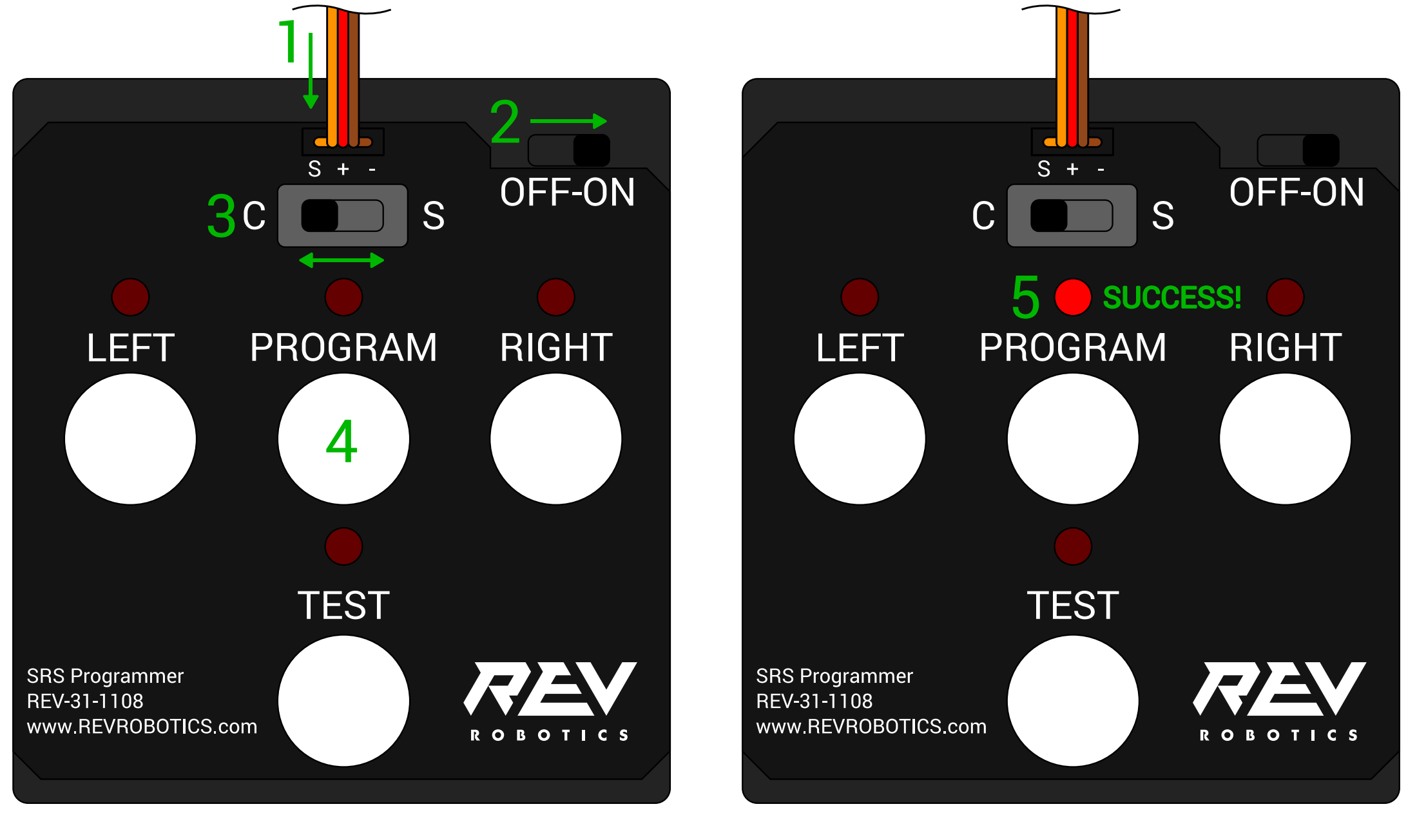 1. Conecte o SRS ao programador. 2. Ligue o programador. 3. Deslize o interruptor de modo para o modo desejado: C - Contínuo, S - Servo. 4. Pressione e solte o botão PROGRAM uma vez. 5. O LED PROGRAM deve piscar e depois ficar sólido, indicando sucesso. ### **Definindo limites angulares** Siga as etapas abaixo para definir os limites angulares para o Modo Servo. A figura abaixo mostra um exemplo de configuração de limites à esquerda e à direita em -30° e +60°, respectivamente. 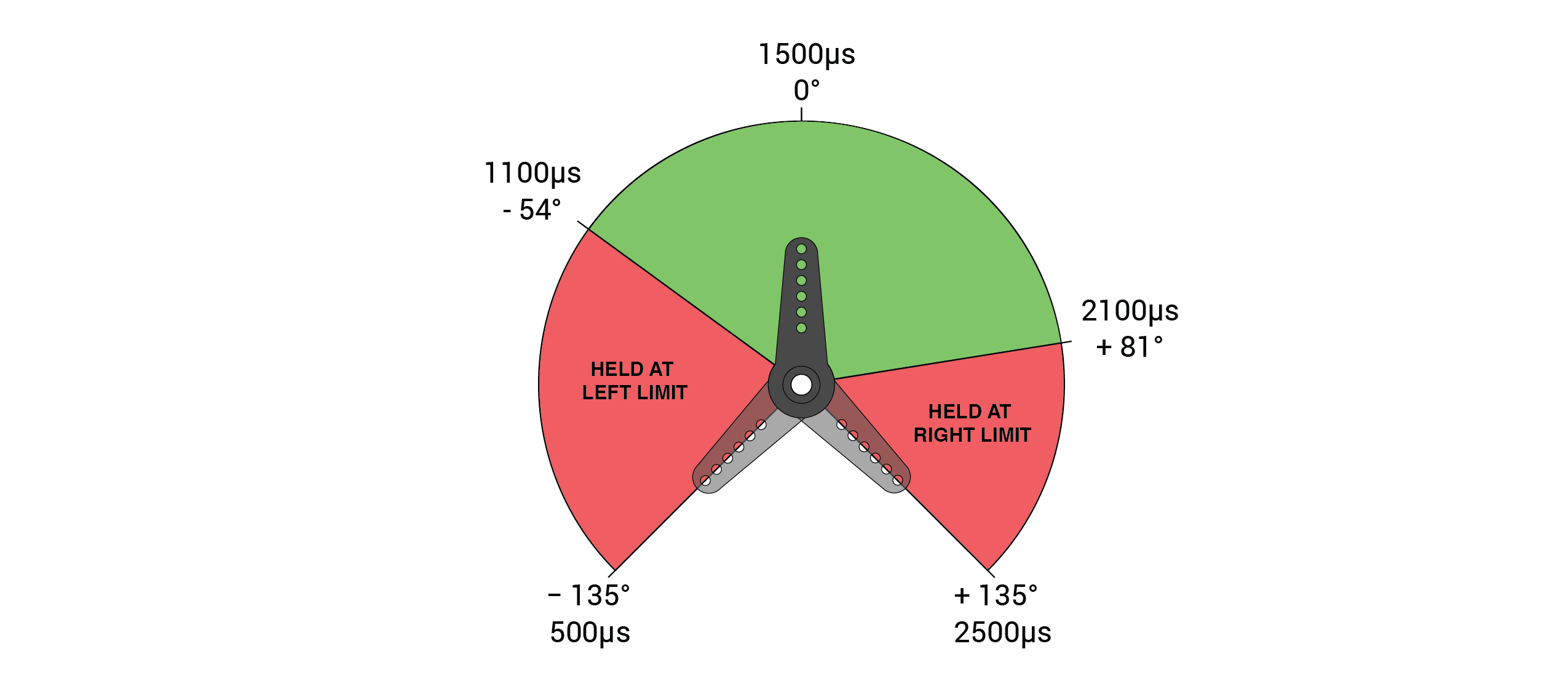 Comece com o SRS já configurado no Modo Servo, consulte a seção Switching Modes para obter instruções. 1. Conecte o SRS ao programador. 2. Ligue o programador. 3. Deslize o interruptor de modo para a posição S. 4. Esta etapa é opcional, mas recomendada para facilitar a visualização das faixas de limites válidos. Consulte o Manual do Usuário do SRS para obter mais informações sobre as faixas de limites válidos. - Pressione e solte o botão TEST duas vezes para entrar no Modo de Teste Manual (consulte Modos de Teste para obter mais informações). - Pressione o botão PROGRAM para centralizar o servo em 0°. - Pressione e solte o botão TEST uma vez para sair do modo de teste. 5. Gire manualmente o servo para a posição desejada do limite à esquerda. 6. Pressione e solte o botão LEFT. O LED LEFT acenderá se a posição for válida. 7. Gire manualmente o servo para a posição desejada do limite à direita. 8. Pressione e solte o botão RIGHT. O LED RIGHT acenderá se a posição for válida. 9. Após definir ambos os limites, pressione e solte o botão PROGRAM. O LED PROGRAM deve piscar e depois ficar sólido, indicando sucesso. ### **Resetar para o padrão** Siga as etapas abaixo para redefinir o Smart Robot Servo para o modo e limites padrão. A figura abaixo mostra o processo de redefinição para os padrões 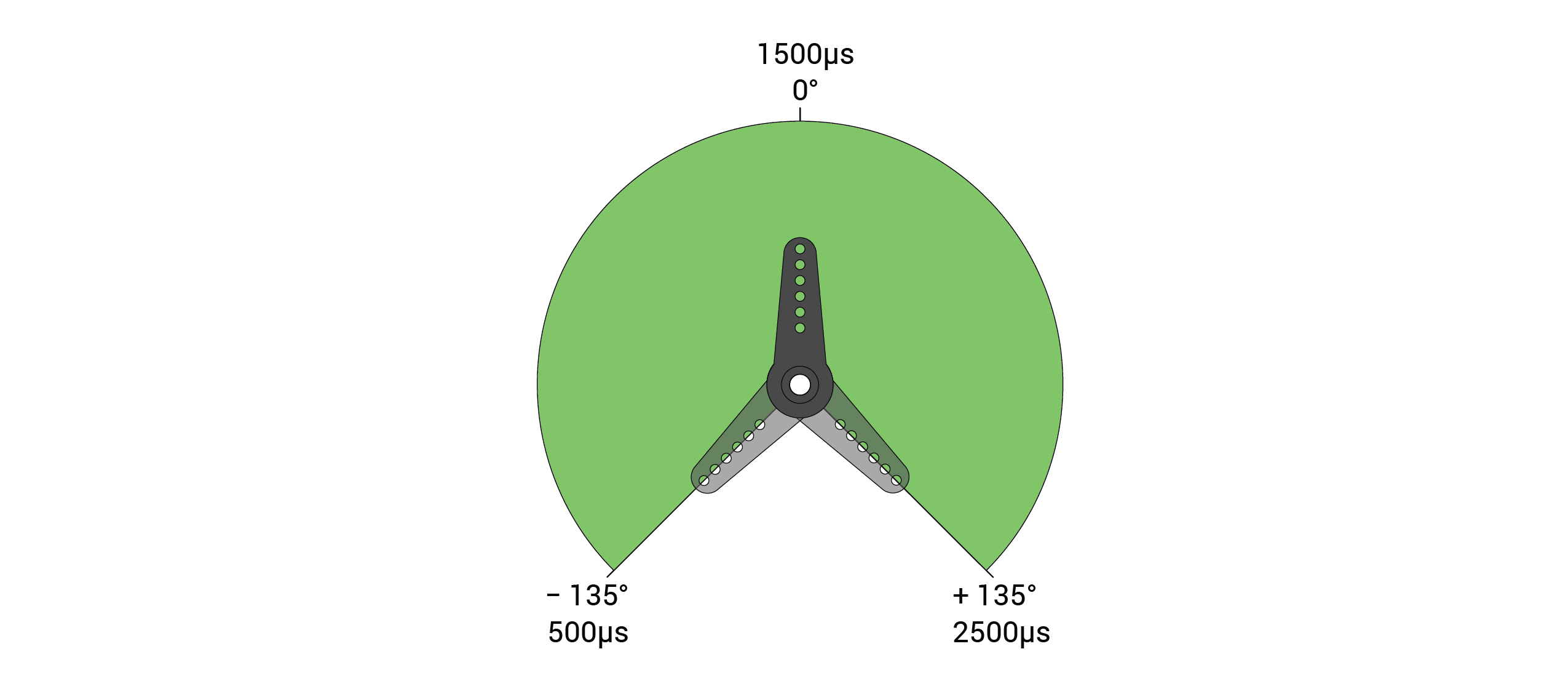 1. Conecte o SRS ao programador. 2. Ligue o programador. 3. Deslize o interruptor de modo para a posição S. 4. Pressione e segure o botão PROGRAM por pelo menos 5 segundos. 5. Os LEDs piscarão e, em seguida, o LED PROGRAM ficará sólido, indicando sucesso. ### **Modos de testes** Tanto no Modo Contínuo quanto no Modo Servo, pressionar e soltar o botão TEST percorre os dois modos de teste: - 1ª pressão - Modo de Varredura Automática - 2ª pressão - Modo de Teste Manual - 3ª pressão - Retornar ao estado padrão A seção abaixo abordará os dois modos de teste diferentes. #### **Modo de varredura automática** No Modo de Varredura Automática, o Programador SRS varrerá automaticamente o SRS através de movimentos apropriados para sua configuração. A tabela abaixo descreve o comportamento com base no modo configurado.| Servo e modo programador | Comportamento |
|---|---|
| Modo contínuo (C) | Alterna direção e velocidade |
| Modo Servo (S) | Alterna entre os limites |
| Servo e modo programador | Botão | Botão | Botão |
|---|---|---|---|
| LEFT | PROGRAM | RIGHT | |
| Modo Contínuo (C) | Rotação anti-horária | Parado | Rotação horária |
| Modo Servo (S) | Até o limite esquerdo | Movimento até o meio | Movimento até o limite direito |