Aprenda mais sobre velocidade angular na seção de Noções básicas.
##### Tensão Operacional A Tensão de Operação é a tensão esperada que o motor experimentará durante a operação. Se um robô for construído usando uma bateria de 12 volts, a Tensão de Operação do motor será de 12 volts. Ao controlar o RPM do motor, o controlador de velocidade irá modular a tensão efetiva percebida pelo motor. Quanto menor a tensão percebida pelo motor, mais devagar ele girará. Motores de CC têm uma tensão máxima classificada e se essa tensão for ultrapassada, o motor falhará prematuramente.Os parâmetros definidos acima estão inter-relacionados. Reserve um tempo para se familiarizar com as definições e como elas se conectam entre si.
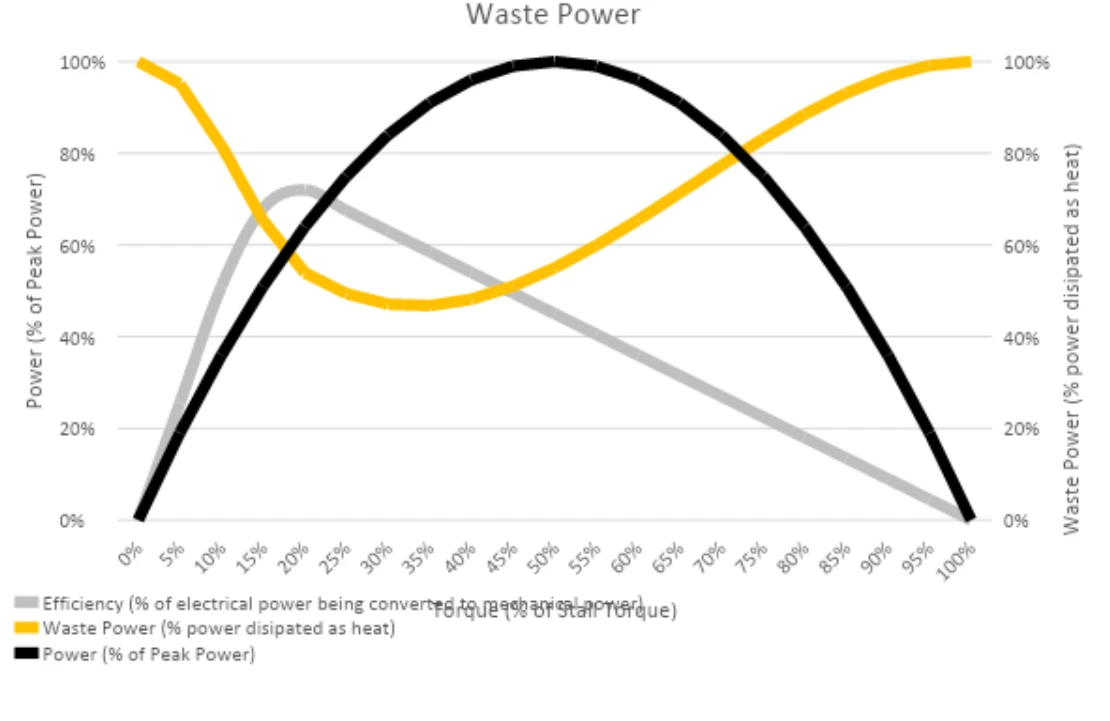
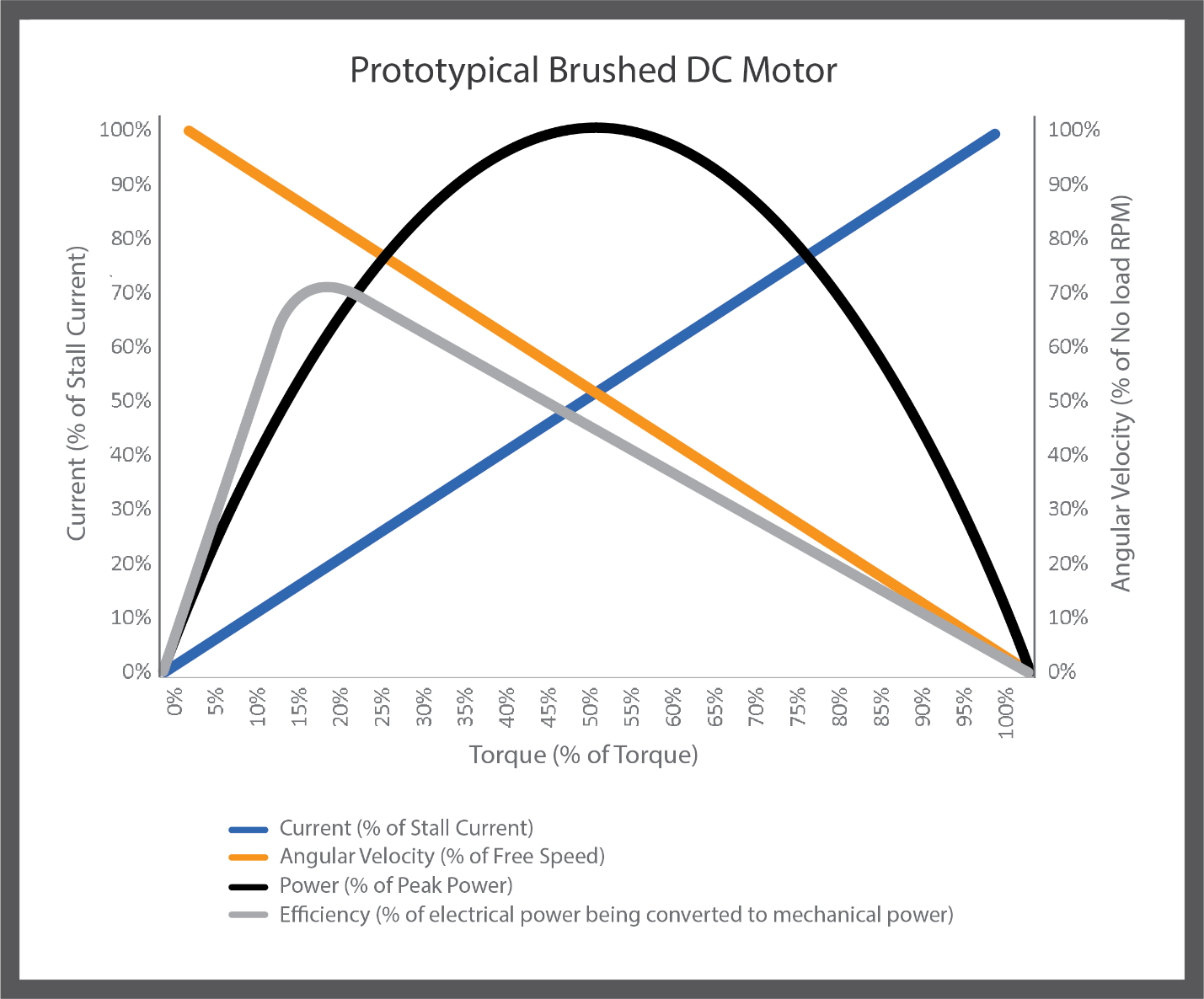 O gráfico de desempenho prototípico de um motor CC escovado pode ser usado para estimar o desempenho de um motor. Na maioria dos casos, a corrente, medida em Ampères, é o valor mais fácil de encontrar, pois pode ser relatada pelo Hub de Controle REV (REV-31-1595) e pelo Hub de Expansão (REV-31-1153). #### **Prevenindo falha do motor prematura** Para garantir que um motor elétrico dure o máximo possível, é importante ter em mente algumas diretrizes: - **Carregamento Suave:** Torque elevado repentino ou mudanças bruscas de direção podem causar desgaste e falha prematura nos componentes da caixa de engrenagens. Isso só se torna um problema quando o pico de torque excede o torque de bloqueio classificado do motor. Quando a carga de choque é necessária, é melhor utilizar frenagem mecânica ou um batedor físico que absorva o impacto em vez de depender do motor. - **Superaquecimento:** Quando um motor é carregado próximo ao seu torque operacional máximo, ele gera mais calor residual do que quando opera em um torque operacional mais baixo. Se esse calor for permitido acumular, o motor pode desgastar prematuramente ou falhar espontaneamente.O motor Core Hex pode funcionar continuamente por aproximadamente 4 horas antes de superaquecer em carga próxima ao torque máximo.
 - **Eixo de saída mal suportado**, a maioria dos eixos de saída do motor não são projetados para suportar grandes forças de impulso ou forças normais ao eixo. Rolamentos precisam ser utilizados para apoiar o eixo quando são esperadas cargas nessas direções. 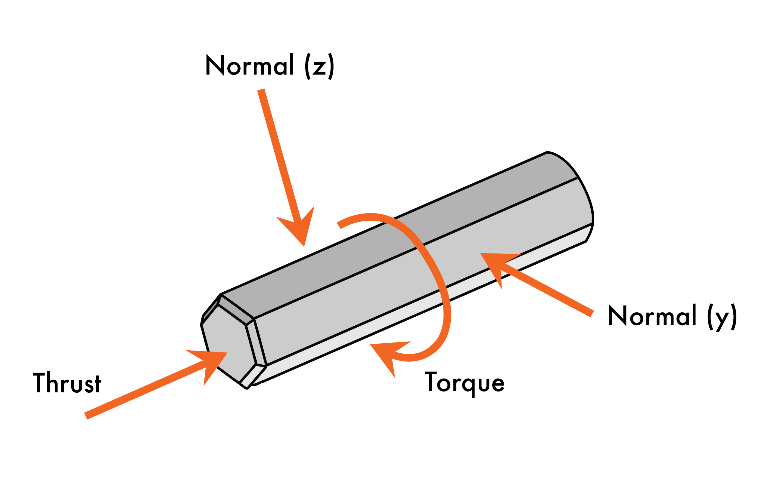Para aprender mais sobre como apoiar adequadamente o movimento, visite a página sobre suporte ao movimento da REV Robotics.
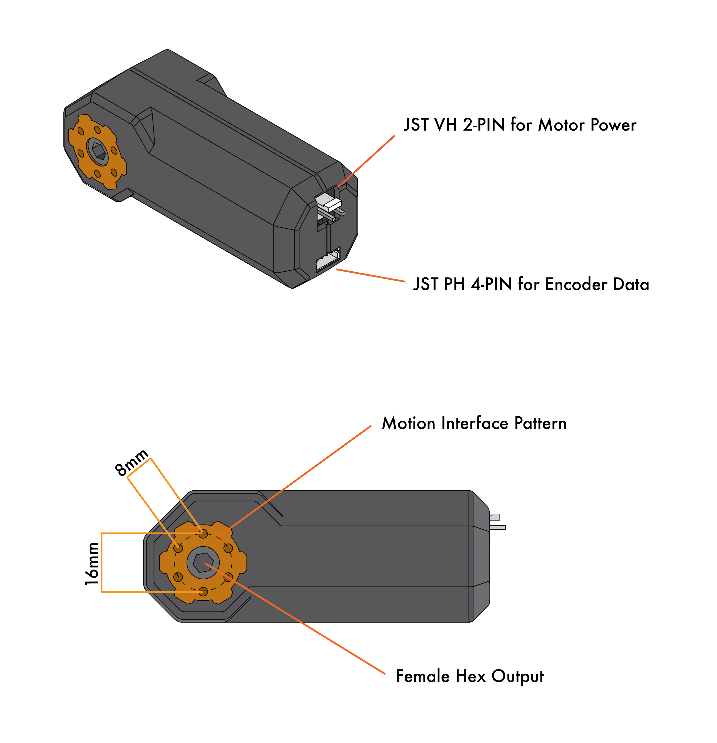
#### **Especificações dos motores da REV** Os motores REV DUO Robotics estão disponíveis em dois tipos: HD Hex Motors e Core Hex Motors. Todos os motores REV DUO têm um eixo hexagonal ou acoplador hexagonal fêmea como saída de sua caixa de engrenagens. O eixo hexagonal é extremamente confiável na transmissão de torque, sem depender de parafusos de fixação que podem soltar-se ou não ser apertados adequadamente. Os motores REV DUO também incluem conectores de bloqueio com chaveta tanto para a alimentação do motor quanto para o codificador embutido.Para mais informações sobre o encoder veja outro livro em nossa documentação
| Motores | Torque de parada | Velocidade Livre | Tensão nominal | Corrente de parada | Máxima potência de saída |
|---|---|---|---|---|---|
| HD HEX | 0,105 N.m | 6000 RPM | 12V | 8.5 Amps | 15W |
| HD HEX 40:1 | 4,2 N.m | 150 RPM | 12V | 8.5 Amps | 15W |
| HD HEX 20:1 | 2,1 N.m | 300 RPM | 12V | 8.5 Amps | 15W |
| HD HEX 20:1 planetária | 2,1 N.m | 300 RPM | 12V | 8.5 Amps | 15W |
| Core Hex 72:1 | 3,2 N.m | 125 RPM | 12V | 4.4 Amps | 8W |
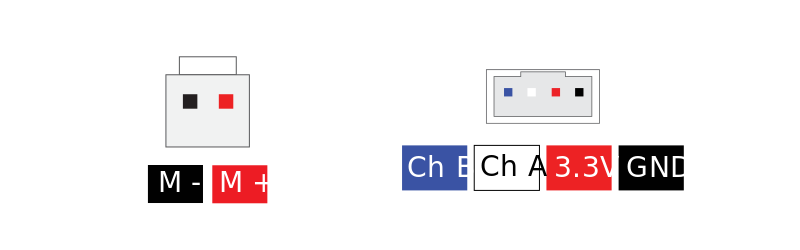
Para obter mais informações sobre os codificadores embutidos e a conexão elétrica para o motor Core Hex, visite o Guia do Sistema de Controle.
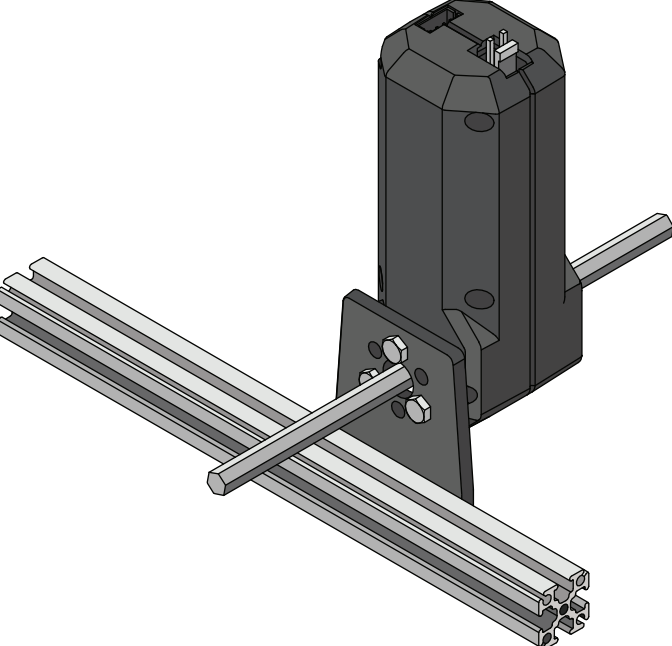
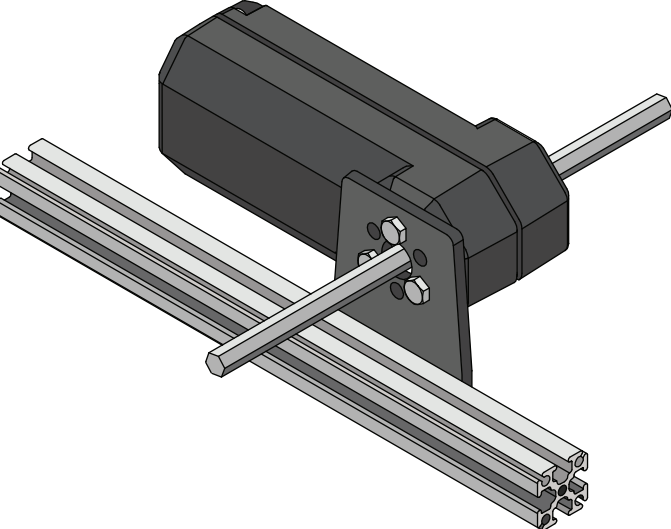
#### **Como montar o motor Core Hex** O Motor Core Hex possui duas faces para montagem em dois lados do motor. A combinação do Padrão de Movimento é ajustada para diferentes ângulos em cada face, proporcionando doze ângulos diferentes do motor. As imagens abaixo mostram uma estrutura de montagem básica para duas das doze posições disponíveis.As imagens mostram um sistema de montagem muito básico. Sempre é aconselhável suportar adequadamente os elementos do seu robô com dois ou mais suportes de plástico.