# Core Hex
# Noções básicas
____
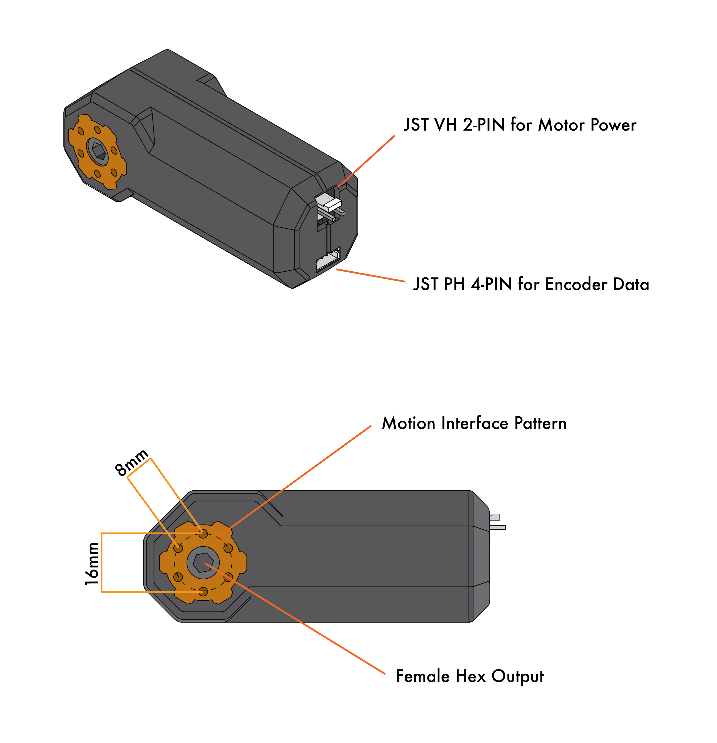
O Motor Core Hex (REV-41-1300) é um motor compatível com o sistema de construção DUO, apresenta uma orientação de 90 graus e um eixo de saída fêmea para máxima flexibilidade e facilidade de uso. Insira qualquer um dos eixos hexagonais padrão de 5mm da REV no Motor Core Hex para criar eixos de saída de motor personalizados com comprimentos variados. O Motor Core Hex possui um codificador magnético de quadratura embutido, compatível com dispositivos lógicos de nível de 5V ou 3.3V, incluindo o Control Hub (REV-31-1595) e o Expansion Hub (REV-31-1153).
##### Pinagem
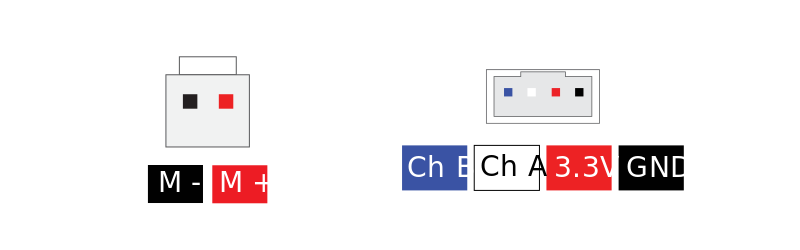
O Motor Core Hex utiliza um conector JST-VH de 2 pinos para a alimentação do motor e um conector JST-PH de 4 pinos para o feedback do sensor proveniente do codificador embutido. Para obter mais informações sobre o uso dos cabos e conectores fornecidos com o Motor Core Hex, consulte a documentação do Sistema de Controle REV - Cabos e Conectores. A imagem abaixo apresenta o layout dos pinos para a alimentação do motor e o codificador.
#### **Especificações**
- Eixo de Saída: Hexagonal Fêmea de 5mm
- Peso: 7 oz (aproximadamente 198,45 g)
- Tensão: 12V DC
- Velocidade Livre: 125 RPM
- Torque de Bloqueio: 3,2 Nm
- Corrente de Bloqueio: 4,4 A
- Relação de Engrenagem: 72:1
- Contagens do Codificador por Revolução
- No motor - 4 contagens/revolução
- Na saída - 288 contagens/revolução
#### **Quando usar**
A recomendação geral é utilizar o motor Core Hex para braços e mecanismos de admissão de carga mais leves.
>Visite a página [Escolhendo um Atuador](https://docs.revrobotics.com/duo-build/actuators/choosing-an-actuator) para aprender mais sobre como determinar qual tipo de atuador é correto para o seu mecanismo.
#### **Como usar**
Para obter mais informações sobre os codificadores embutidos e a conexão elétrica para o motor Core Hex, visite o Guia do Sistema de Controle.
#### **Como montar o motor Core Hex**
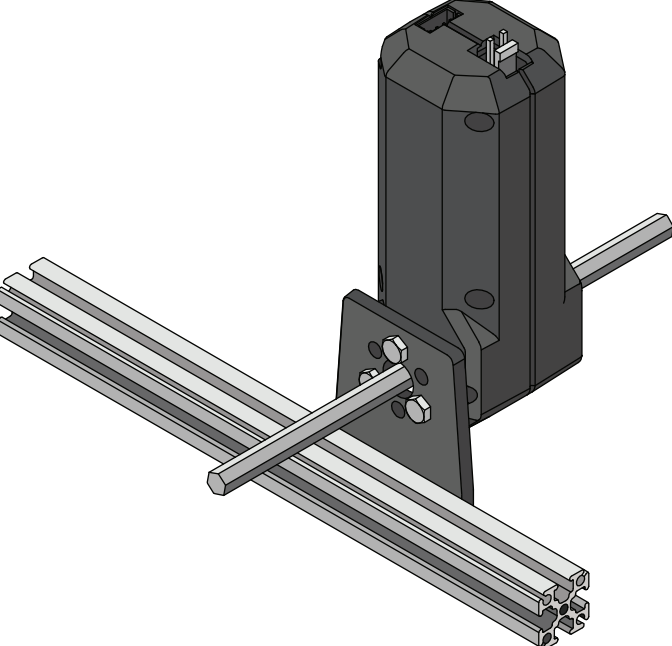
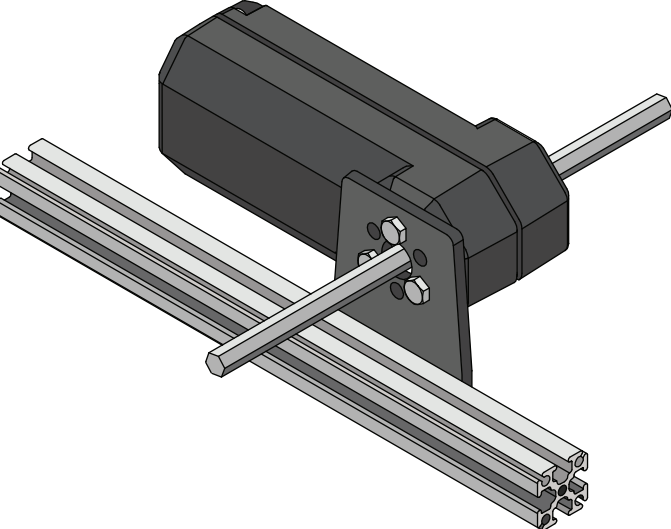
O Motor Core Hex possui duas faces para montagem em dois lados do motor. A combinação do Padrão de Movimento é ajustada para diferentes ângulos em cada face, proporcionando doze ângulos diferentes do motor. As imagens abaixo mostram uma estrutura de montagem básica para duas das doze posições disponíveis.
As imagens mostram um sistema de montagem muito básico. Sempre é aconselhável suportar adequadamente os elementos do seu robô com dois ou mais suportes de plástico.
#### **Próximos passos**
Veja o seguinte documento caso queira aprender mais sobre acionadores: [Servos](https://docs.stemos.com.br/books/guia-de-servos)