# Codificadores dos motores REV
___
Os Motores REV Robotics HD Hex (REV-41-1291) e os Motores Core Hex (REV-41-1300) vêm com um codificador magnético de quadratura já instalado e um cabo apropriado para conectar a saída do encoder ao REV Robotics Control Hub (REV-31-1595) ou ao Expansion Hub (REV-31-1153). Consulte a Tabela 1 e a Tabela 2 para obter detalhes relevantes sobre o encoder.
### **Especificações do codificador do motor Core Hex**
| Especificações | Detalhes |
| ---- | ---- |
| **Redução do motor Core Hex** | 72:1 |
| Velocidade Livre (RPM) | 125 |
| CPR do eixo| 4 (1 subida do canal A) |
| CPR fora do eixo | 288 (72 subidas do canal A)
#### **Pinagem**
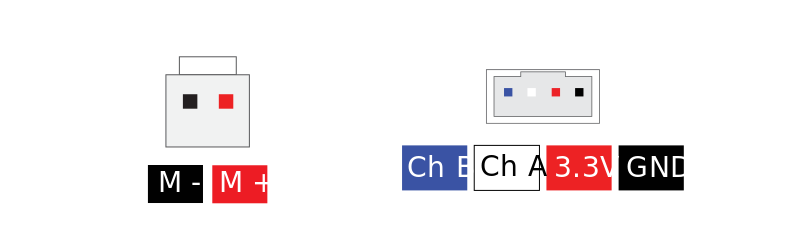
O Motor Core Hex utiliza um conector JST-VH de 2 pinos para a alimentação do motor e um conector JST-PH de 4 pinos para o feedback do sensor do encoder incorporado. Para obter mais informações sobre o uso dos cabos e conectores incluídos com o Motor Core Hex, consulte a documentação do [Sistema de Controle REV - Cabos e Conectores](https://docs.revrobotics.com/duo-control/control-system-overview/cables-and-connectors). A imagem abaixo apresenta a pinagem para a alimentação do motor e o encoder.
### **Especificações do codificador do HD Hex**
| **Especificações** | Tipo do motor | | |
| --- | --- | --- | --- |
| **Redução HD Hex** | Apenas o motor | 40:1 | 20:1 |
| **Velocidade Livre (RPM)** | 6000 | 150 | 300 |
| **CPR do eixo do codificador** | 28 (7 subidas no canal A) | 28 (7 subidas no canal A) | 28 (7 subidas no canal A)
| **CPR no eixo externo** | 28 (7 subidas no canal A) | 1120 (280 subidas no canal A) | 560 (140 subidas no canal A) |
#### **Pinagem**
The HD Hex Motor utiliza um conector JST-VH de 2 pinos para a alimentação do motor e um conector JST-PH de 4 pinos para o feedback do sensor do encoder incorporado. Para obter mais informações sobre o uso dos cabos e conectores incluídos com o HD Hex Motor, consulte a documentação do [Sistema de Controle REV - Cabos e Conectores](https://docs.revrobotics.com/duo-control/control-system-overview/cables-and-connectors). A imagem abaixo apresenta a pinagem para a alimentação do motor e o encoder.