Essa página oferece para usuários de C++ um ensinamento básico de programação para FRC
Ainda que você não esteja usando Java, lembre-se de olhar a página anterior para criar seu projeto de robô
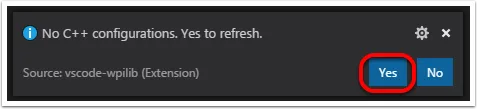
## **Configurações C++** Para projetos em C++, há mais uma etapa para configurar o IntelliSense. Sempre que abrimos um projeto, deveríamos receber um pop-up no canto inferior direito perguntando se desejamos atualizar as configurações do C++. Clique em "Sim" para configurar o IntelliSense.
As inicializações de variáveis para C++ estão na seção privada na parte inferior do programa. Isso significa que elas são privadas para a classe (Robot). O código em C++ também define o tempo de expiração do Motor Safety para 0,1 segundos (o acionamento será desligado se não receber um comando a cada 0,1 segundos) e inicia o Timer usado para o modo autônomo.
## **Inicialização do robô** ```c void RobotInit() {} ``` O método RobotInit é executado quando o programa do robô está inicializando, mas após o construtor. O RobotInit para o nosso programa de exemplo não faz nada. Se quisermos executar alguma coisa aqui, poderíamos fornecer o código acima para substituir o padrão. ## **Autônomo simples de exemplo** ```c void AutonomousInit() override { m_timer.Restart(); } void AutonomousPeriodic() override { // Drive for 2 seconds if (m_timer.Get() < 2_s) { // Drive forwards half speed, make sure to turn input squaring off m_robotDrive.ArcadeDrive(0.5, 0.0, false); } else { // Stop robot m_robotDrive.ArcadeDrive(0.0, 0.0, false); } } ``` O método AutonomousInit é executado uma vez cada vez que o robô faz a transição para o modo autônomo a partir de outro modo. Neste programa, reiniciamos o Timer neste método. AutonomousPeriodic é executado uma vez a cada período enquanto o robô está no modo autônomo. Na classe TimedRobot, o período é um tempo fixo, que por padrão é de 20ms. Neste exemplo, o código periódico verifica se o temporizador é inferior a 2 segundos e, se for o caso, move-se para frente a meia velocidade usando o método ArcadeDrive da classe DifferentialDrive. Se mais de 2 segundos tiverem se passado, o código para o acionamento do robô. ## **Controle de analógico para teleoperado** ```c void TeleopInit() override {} void TeleopPeriodic() override { // Drive with arcade style (use right stick to steer) m_robotDrive.ArcadeDrive(-m_controller.GetLeftY(), m_controller.GetRightX()); } ``` Assim como no modo Autônomo, o modo Teleop possui funções TeleopInit e TeleopPeriodic. Neste exemplo, não temos nada a fazer em TeleopInit; ele é fornecido apenas para fins ilustrativos. Em TeleopPeriodic, o código utiliza o método ArcadeDrive para mapear o eixo Y do joystick no movimento para frente/trás dos motores de acionamento e o eixo X no movimento de viragem. ## **Modo de teste** ```c void TestInit() override {} void TestPeriodic() override {} ``` O Modo de Teste é utilizado para testar a funcionalidade do robô. Semelhante ao TeleopInit, os métodos TestInit e TestPeriodic são fornecidos aqui apenas para fins ilustrativos. ## **Compilando o projeto no robô** Por favor, consulte as instruções [aqui](https://docs.wpilib.org/pt/stable/docs/software/vscode-overview/deploying-robot-code.html#building-and-deploying-robot-code) para implantar o programa em um robô.