# CoreBot - Robô para o Jogo FRC 2025
# Visão Geral & Objetivos
Nessa página serão apresentados os objetivos, funcionalidades e prioridades de design do CoreBot
Este documento foi desenvolvido em parceria com a equipe JACTECH #9458
---
## Propósito Principal
O **CoreBot** é um projeto aberto para times com poucos recursos construírem robôs de FRC de maneira otimizada e competitiva.
Foi projetado para o jogo FRC 2025, destacando-se em:
- Pontuar elementos de coral nos níveis **L1, L2 e L3 do Recife.**
- Remover algas do Recife.
- Coletar coral de um lado e pontuar do outro lado do robô.
---
#### Prioridades de Design
- Custo reduzido: Focado em acessibilidade para equipes com recursos limitados.
- Velocidade adequada: Equilíbrio entre mobilidade e estabilidade.
- Modularidade: Componentes adaptáveis às preferências da equipe.
---
#### Inovações Principais
- Pontuação bilateral: Capacidade única de coletar e pontuar em lados opostos do robô.
---
#### Regras do Jogo que Influenciaram o Design
- Requisitos de pontuação em L1–L3.
- Mecânica de remoção de algas.
# Especificações Técnicas e Design Mecânico
Nessa página serão mostradas as Especificações Técnicas e o Design Mecânico do CoreBot
---
## Especificações Técnicas
| Categoria | Detalhes |
| **Dimensão** | Altura: 1M, Peso: Máximo 40kg |
| **Sistema de tração** | Tank |
| **Motores** | - Pivô: 1x NEO (com encoder integrado) |
| - EndEffector: 1x motor DC |
| - Backpack: 1x motor DC |
| - Tração: 4x motores (escolha da equipe) |
| **Automação** | - Encoder relativo (integrado ao motor NEO) |
| - Sensores adicionais opcionais |
| **Sistemas de Controle** | Configurável de acordo com a equipe (ex: RoboRIO + SPARK MAX/TalonFX) |
---
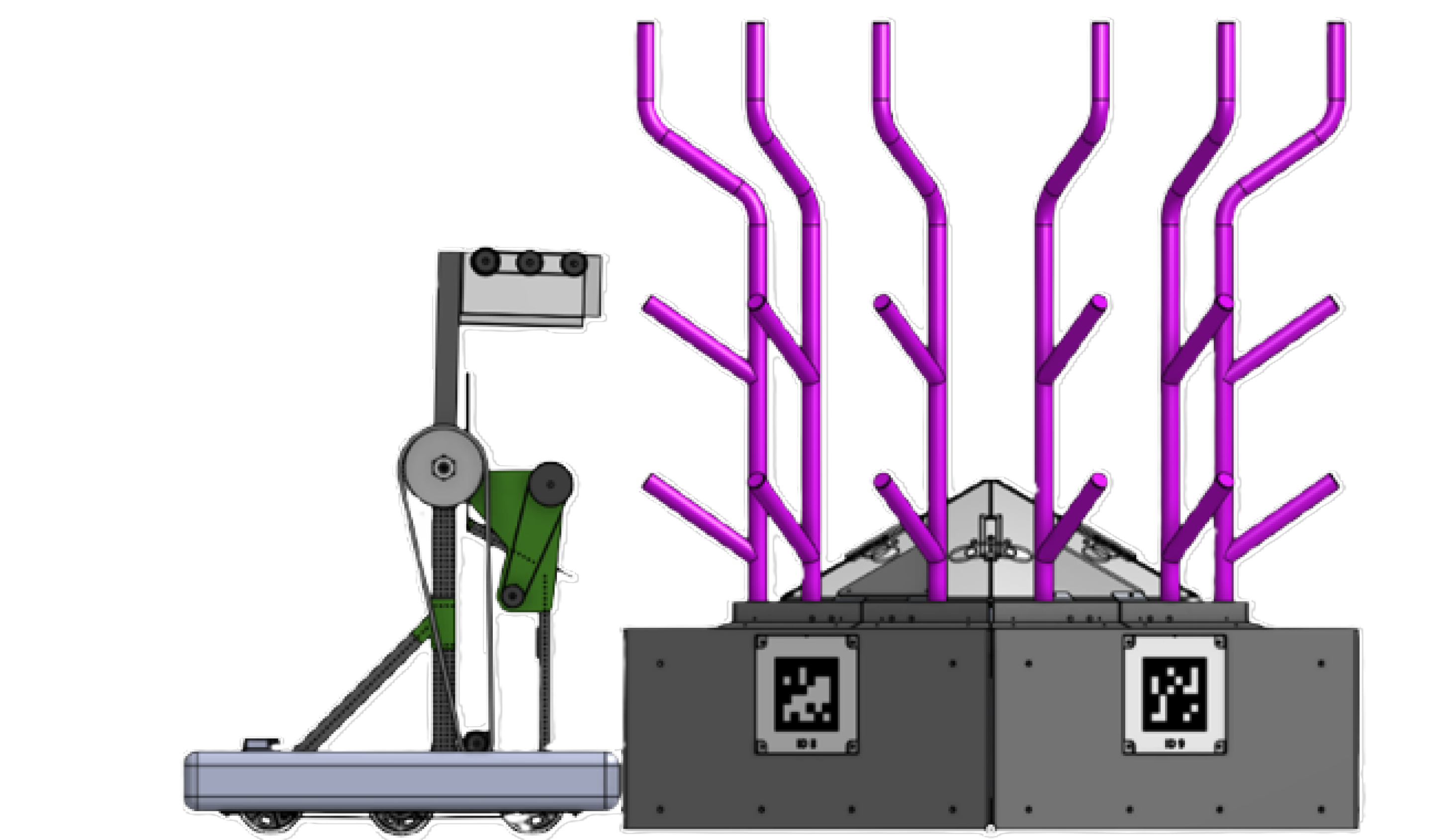
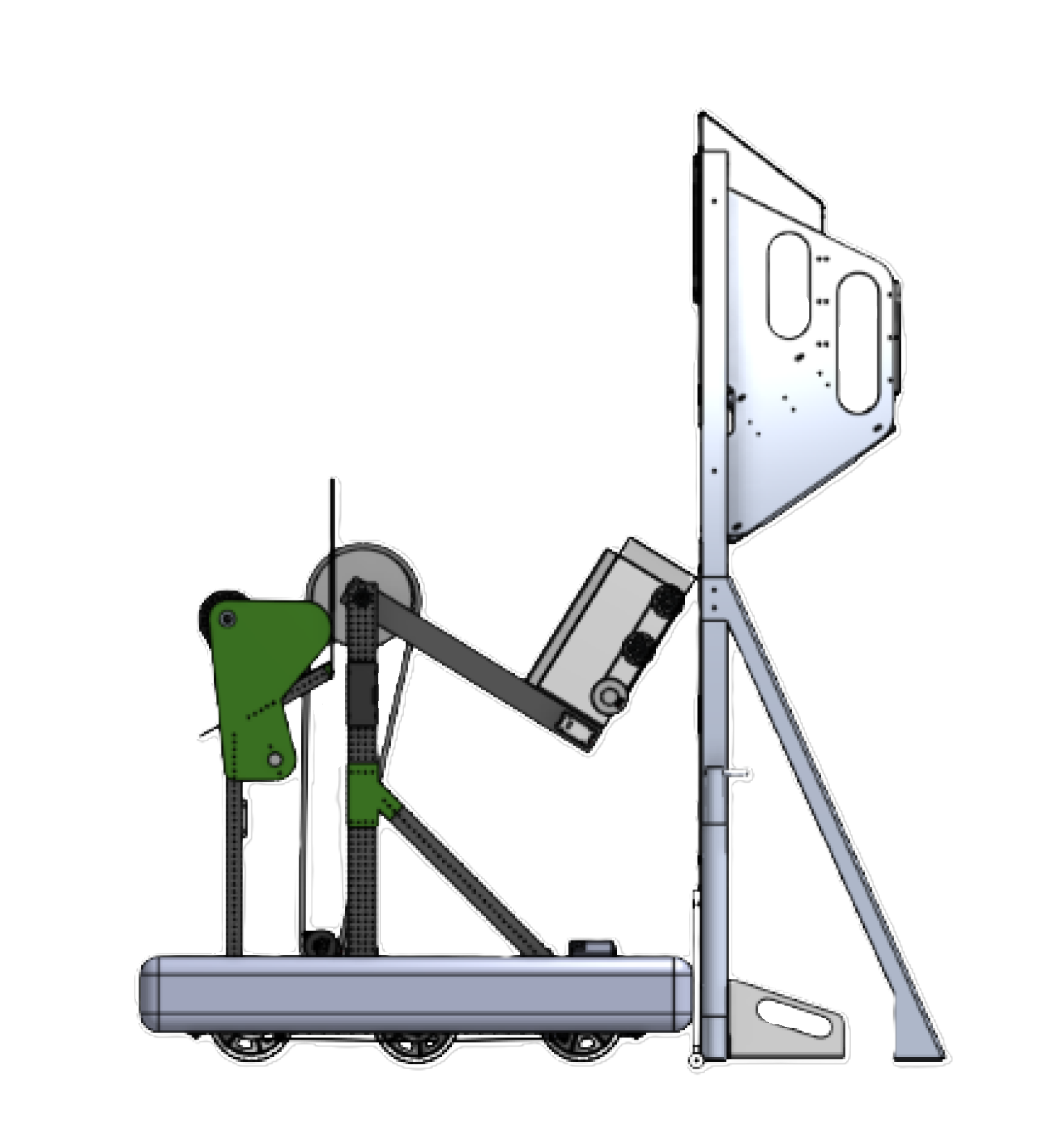
## Design Mecânico
#### Estrutura do Chassi
- Materiais: Alumínio (estrutura principal) + policarbonato (painéis leves).
- Montagem: Parafusada para modularidade e fácil manutenção.
---
#### Mecanismos Críticos
- EndEffector: Mecanismo central de pontuação (design personalizável pela equipe).
- Junta: Subsistema de braço com redução de 3:1 (corrente/roda dentada) para movimentos precisos.
---
#### Durabilidade & Segurança
- Suportes reforçados para a superestrutura.
- Mínimo de peças personalizadas para confiabilidade.
# Software e Subsistemas
Nessa página serão abordados o software, seus controles e os subsistemas incluídos no robô
---
## Software e Controles
#### Programação
- Framework: Java command-based (WPILib).
- Autônomo: Pode-se usar bibliotecas para autonomous, ficando de preferência da equipe.
---
#### Sensores & Feedback
- Encoder relativo do NEO permite ajuste PID para posicionamento da junta.
---
#### Ferramentas de Depuração
- Shuffleboard: Monitora valores PID, status dos motores e dados dos sensores.
---
## Subsistemas & Funcionalidades
#### Chassi Tank
- Função: Mobilidade e controle do chassi.
- Componentes: 4x motores + 4x controladores SPARK MAX.
---
#### Backpack (Mochila)
- Função: Coleta coral da Estação de Coral deitado e pontua em L1.
- Componentes: 1x motor DC + SPARK MAX + rodas flexíveis de 4 polegadas.
---
#### Junta (Grau de Liberdade)
- Função: Posiciona o EndEffector para pontuação em L2/L3.
- Componentes: 1x motor com caixa de redução 3:1 + sistema de corrente/roda dentada.
---
#### EndEffector
- Função: Interage diretamente com os elementos do jogo (pontuação do coral/remoção de algas).
- Componentes: Mecanismo com 1 motor e rodas flexíveis de 2.5 polegadas (design personalizável).
---
#### Melhorias futuras
- Adicionar vision processing (ex: Limelight) para alinhamento autônomo.
- Atualizar para tração swerve (se houver recursos disponíveis).
# Guia do Usuário e Montagem
Nessa página será mostrado o Guia do Usuário juntamentre com passos críticos da montagem
---
## Guia do Usuário
#### Controles do Driver:
- Botão A: Pontuação no L1 (Pontuação via Backpack)
- Botão B: Pontuação no L2 (Posicionamento da junta no L2 -> Pontuação)
- Botão Y: Pontuação no L3 (Posicionamento da junta no L3 -> Pontuação)
- Gatilho Direito: Intake pela backpack (Coleta via Backpack -> Armazenamento Backpack)
- Gatilho Esquerdo: Pontuação no L1 (Coleta via Outtake)
- Botão Start: Posição Home (Posicionamento da junta na posição 0)
---
#### Fluxo de Ações:
1. Posicionamento na junta -> Coleta pelo EndEffector → Armazenamento → Posicionamento da junta → Pontuação -> Retorno do EndEffector para o home
2. Intake via backpack -> Armazenamento -> Pontuação
---
#### Problemas Comuns:
- 0 do encoder relativo: Verifique firmware do SPARK MAX e conexões de energia.
- Encoder descalibrado: Rezerar o encoder do NEO via software.
---
## Montagem & Manutenção
#### Passos Críticos:
- Ajuste da tensão da corrente da junta (corrente #35).
- Calibração: Zerar o encoder do NEO após a montagem e garantir que o robô vai ser ligado na sua posição inicial.
# CAD e Código do CoreBot
Nessa página será mostrado o CAD no Onshape, juntamente com o código base do CoreBot no GitHub
---
CAD: [LINK](https://cad.onshape.com/documents/72107048f239613af2a2a38e/w/d243c281e397d77bc8b48d36/e/0d23374bdcf1bfc317e9e097?renderMode=0&uiState=679be3f42a26c476026bc050)
---
Código: [LINK](https://github.com/JACTECH9458/CoreBot/tree/main/CoreBot2025-Code)
---
GitHub: [LINK](https://github.com/JACTECH9458/CoreBot)
O código acima se trata de uma base, os valores devem ser alterados de acordo com o robô da equipe.