| Parâmetro | Min | Tipo | Máx |
|---|---|---|---|
| Voltagem de Operação Recomendada † | 5.5V | 12V | 13.5V |
| Entrada Absoluta de Voltagem †† | 5.2V | - | 25V |
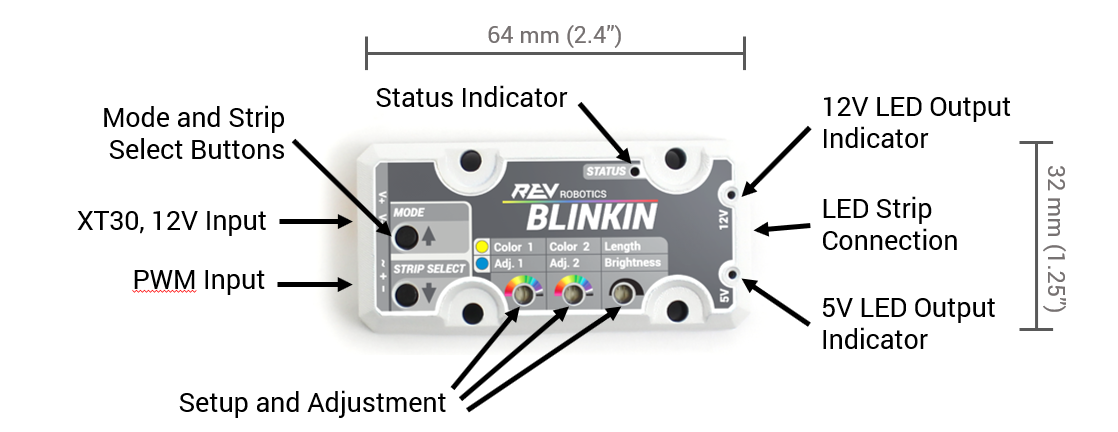
| Entrada de Energia | - | Conector XT30, Macho | - |
| Entrada PWM | - | Conector 3 pinos passo 0,1 pol | - |
| Adaptador de Fita LED | - | Conector JST PH de 7 pinos | - |
| Corrente de Saída LED 12V‡ | - | - | 12A |
| Corrente de Saída LED 5V‡‡ | - | - | 5A |
| Legenda | |
|---|---|
| † | A operação mínima de inicialização para os LEDs de 5V é de 7V. A saída para os LEDs de 12V é alimentada diretamente pela tensão de entrada; portanto, uma tensão de entrada mais baixa ou significativamente mais alta pode impedir o funcionamento adequado e pode causar danos ao dispositivo. |
| †† | A tensão de operação recomendada na entrada é de 5,5V a 13,5V. O intervalo absoluto de tensão de entrada é de 5,2V a 25V — tenha cautela ao exceder a faixa recomendada para evitar danos ao dispositivo. |
| ‡ | Máximo de saída de 12A. Suporta no máximo 300 LEDs em série, ou até duas séries de 300 em paralelo. Equivalente a 10 metros de LEDs em fitas de 60 LEDs por metro. |
| ‡‡ | Saída máxima de 5A. Suporta até 240 LEDs para mais padrões e brilho. Equivalente a 4 metros de LEDs em fitas de 60 LEDs por metro. |
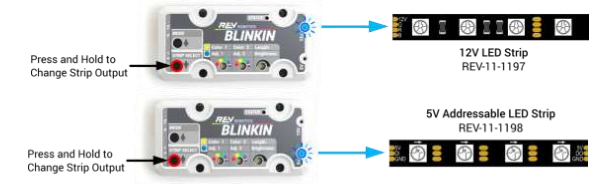
| Fita LED RGB de 12V | Esses LEDs estão todos conectados entre si, então a fita estará sempre com uma única cor sólida. No entanto, esse tipo de fita de LED geralmente é mais barato do que os de 5V. O Blinkin foi projetado para LEDs de 12V com ânodo comum, como o REV-11-1197. Essas fitas possuem uma interface de quatro fios e podem ser cortadas a cada três LEDs. |
| Fita LED de 5V | O Blinkin pode controlar fitas de LED do tipo WS2812 de 5V com endereçamento individual, como a REV-11-1198. Esse tipo de fita é mais caro do que o modelo de 12V, mas cada LED individual pode ter uma cor e brilho diferentes, permitindo criar animações muito coloridas. Essas fitas possuem uma interface de três fios e podem ser cortadas entre cada LED. |



Deixe o padrão exibido no padrão de teste (75) ao sair para manter o padrão padrão de ausência de sinal inalterado.
##### Saindo do Modo de Configuração Salvar e Sair: Pressione e segure os botões *Mode* e *Strip Select* por aproximadamente 6 segundos. As cores, o comprimento da fita e o novo padrão padrão para ausência de sinal serão salvos permanentemente na memória EEPROM e permanecerão após desligar e ligar o dispositivo.


O LED de Status voltará a ficar azul quando o Modo de Configuração for encerrado.
#### **Controle PWM** O Blinkin pode ser controlado por software usando um sinal PWM no estilo padrão de servo. O Blinkin mede a largura do pulso recebido do sinal PWM e, com base nesse valor, seleciona um padrão correspondente da tabela de padrões. As larguras de pulso válidas vão de 1000 μs a 2000 μs. 1. Conecte o Blinkin a uma porta de controle PWM no controlador do robô, como o Control Hub ou o roboRIO, usando um cabo PWM padrão. 2. Usando a linguagem de programação de sua preferência, gere um sinal PWM.Para uso com o Sistema de Controle FRC e o WPILib, crie um motor do tipo SPARK. (Outros tipos de motores e servos também funcionarão, mas podem alterar os valores associados a padrões específicos.)
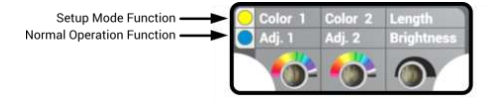
3. No seu código principal do robô, onde normalmente a potência de saída do motor (ou servo) é atualizada, defina a saída com o valor correspondente ao padrão desejado (consulte as Tabelas de Padrões de LED). #### **Ajustes de Padrão** Todas as fitas de LED e padrões podem ter seu brilho geral ajustado, e muitos dos padrões também permitem ajustes na densidade e na velocidade do padrão. A Tabela de Padrões de LED detalha quais padrões permitem quais tipos de ajustes. Enquanto o Blinkin não estiver em Modo de Configuração, siga os passos: Selecione um padrão que permita ajuste. Use uma pequena chave de fenda, como a que acompanha o produto, para ajustar os seguintes potenciômetros: Adj. 1 – Ajuste 1 (geralmente densidade do padrão) Adj. 2 – Ajuste 2 (geralmente velocidade do padrão) Brightness – Ajuste de brilho geral
Geralmente, os três potenciômetros ajustam o seguinte durante a Operação Normal: Adj. 1 – Densidade do padrão, largura do padrão ou escurecimento Adj. 2 – Velocidade Brightness – Brilho de toda a fita de LED
# Tabela de padrões do LED --- #### **Planilha de Padrões de Fita de LED** Para acessar a planilha [clique aqui](https://1166281274-files.gitbook.io/~/files/v0/b/gitbook-x-prod.appspot.com/o/spaces%2F-ME3KPEhFI6-MDoP9nZD%2Fuploads%2FMOYJvZmWgxCVKJhcV5fn%2FREV-11-1105-LED-Patterns.pdf?alt=media&token=e8227890-6dd3-498d-834a-752fa43413fe), você será redirecionado para o site do fabricante. #### **Valores Padrão de Fábrica do Blinkin** Variável|Valor padrão ---|--- Color 1| Sky Blue - 0x0080FF Color 2 | Gold - 0xFFEA00 Comprimento da fita | 60 LEDs Padrão sem sinal | 29 - Ondas de cor, Paleta Festiva Seleção de fita | 5V # Solução de problemas --- #### **Padrões do LED de status** [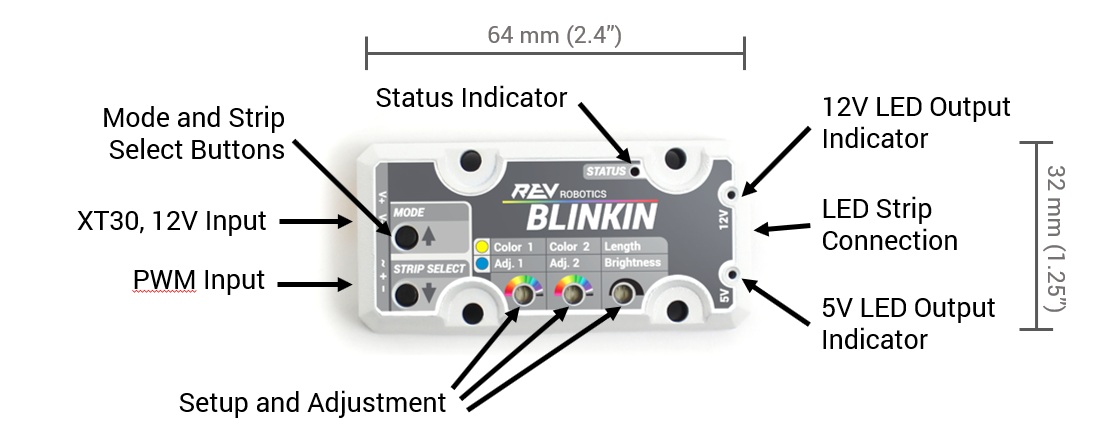](https://docs.stemos.com.br/uploads/images/gallery/2025-05/IYPimage-5.png)| LED Status | Descrição do LED | Status do Blinkin |
|---|---|---|
| [](https://docs.stemos.com.br/uploads/images/gallery/2023-12/blue-solid.png) | Status - Azul Sólido | Operação Normal, Sinal PWM Detectado |
|  | Status - Azul Piscante | Operação Normal, Sinal PWM Não Detectado |
|  | Status - Azul Piscante | Operação Normal, Sinal PWM Não Detectado |
|  | Status - Amarelo Piscante | Modo de Configuração, Sinal PWM Não Detectado |
|  | Status - Azul Sólido com Magenta Piscante | Sinal de Comando Detectado |
| [](https://docs.stemos.com.br/uploads/images/gallery/2023-12/blue-solid.png) | Saída 12V - Azul Sólido | Fita de LED 12V Selecionada |
| [](https://docs.stemos.com.br/uploads/images/gallery/2023-12/blue-solid.png) | Saída 5V - Azul Sólido | Fita de LED Endereçável 5V Selecionada |
| | Legenda |
|---|---|
| † | Com alguns comandos, o piscar em magenta pode durar até que o próximo sinal de comando de padrão de LED seja recebido. |
| †† | Se os LEDs de Saída 12V e Saída 5V estiverem ligados ao mesmo tempo, por favor, prossiga com um Reset de Fábrica. |
A REV Robotics recomenda ter um botão programado em seu controle para resetar o padrão em caso de uma perda de energia temporária.
##### Incapaz de controlar via PWM Se um Driver de LED Blinkin consegue executar as sequências de luz pré-instaladas, mas não pode ser controlado por um sinal PWM padrão, como os que controlam um motor servo, verifique se o Blinkin e seu Control Hub ou roboRIO compartilham a mesma fonte de energia ou **têm um aterramento elétrico em comum**. Na maioria das vezes, corrigir a alimentação de energia do seu Blinkin resolverá esse problema! #### **Reset de fábrica** O Blinkin pode armazenar configurações personalizadas do usuário na memória para que persistam através dos ciclos de energia (reinicializar). Restaure o Blinkin para as configurações de fábrica usando o seguinte procedimento:Um reset de fábrica fará com que seu Blinkin recarregue os valores padrão em sua memória permanente. Todas as configurações atuais serão apagadas.
1. Desligue o Blinkin 2. Pressione e segure os botões Modo e Strip Select  3. Ligue o Blinkin  4. Espere por cerca de ~2 segundos. 5. Solte os botões Modo e Strip Select. # Exemplos de Aplicação REV ION --- #### **Fiação usando o sistema de controle da FIRST Robotics Competition** O Driver de LED BLINKIN vem com o Cabo PWM de 36” (REV-11-1130), que pode ser usado para conectar o BLINKIN às portas PWM do NI roboRIO para comunicação. Para alimentar o BLINKIN, você precisa de um cabo XT30 com um conector macho em uma ponta e fios desencapados na outra. Conecte o conector macho ao BLINKIN e as extremidades desencapadas nos canais apropriados do Power Distribution Hub. O BLINKIN é capaz de controlar tanto uma fita de LED endereçável de 5V (REV-11-1198) quanto uma fita de LED RGB de 12V (REV-11-1197). A imagem abaixo mostra como ambos os tipos de fitas de LED se conectam ao BLINKIN usando o Adaptador de Cabo LED BLINKIN (REV-11-1105).Sempre certifique-se de ler as regras relevantes e usar fios com bitola adequada antes de utilizar qualquer coisa no seu robô de competição.
[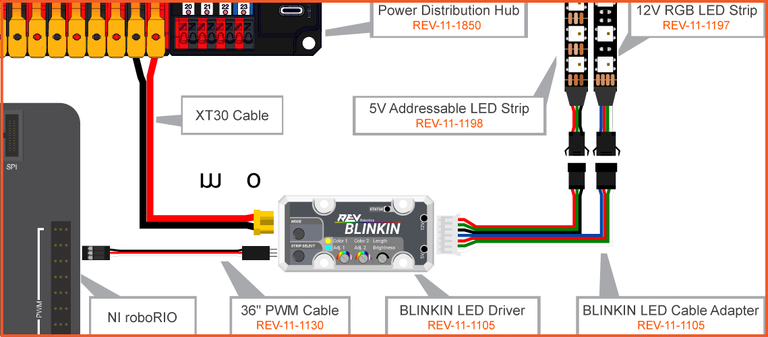](https://docs.stemos.com.br/uploads/images/gallery/2025-05/WWaimage-5.png) Após conectar seu Blinkin ao robô, siga as [instruções de configuração](https://docs.stemos.com.br/books/controlador-de-led-UXx/page/guia-de-inicio) e as orientações para controle PWM conforme desejado. #### **Exemplo de Programação para FIRST Robotics Competition** No Sistema de Controle FRC, a faixa de saída dos motores varia dependendo do tipo de controlador de motor que foi inicializado. A faixa do pulso de saída é ajustada a partir da potência solicitada pelo usuário, que varia de -1 a 1, para a faixa definida para cada tipo de controlador de motor.| Controlador de motores | Pulso Mín. do comprimento de saída (us) | Pulso Máx. do comprimento de saída (us) |
|---|---|---|
| SPARK | 1000 | 2000 |
| SRX | 997 | 2004 |
| Talon SR | 989 | 2037 |
| Jaguar | 697 | 2322 |
| Cor do LED/Padrão | Valor de saída do motor |
|---|---|
| Arco-íris com Cores do Oceano | -0.95 |
| Scanner Larson (Semelhante a um Cylon) | -0.35 |
| Batimento cardíaco rápido na Cor 1 do Time selecionada pelo usuário | 0.07 |
| Azul Sólido | 0.87 |
| Largura do Pulso (μs) | Valor roboRIO SPARK | Tipo de Padrão | Padrão/Paleta |
|---|---|---|---|
| 1005 | -0,99 | Padrão com Paleta Fixa | Arco-íris, Paleta Rainbow |
| 1015 | -0,97 | Padrão com Paleta Fixa | Arco-íris, Paleta Festiva |
| 1025 | -0,95 | Padrão com Paleta Fixa | Arco-íris, Paleta Oceano |
| ... | ... | ... | ... |
| 1325 | -0,35 | Padrão com Paleta Fixa | Scanner Larson, Vermelho |
| ... | ... | ... | ... |
| 1515 | 0,03 | Padrão Cor 1 | Batimento Cardíaco Lento |
| 1525 | 0,05 | Padrão Cor 1 | Batimento Cardíaco Médio |
| 1535 | 0,07 | Padrão Cor 1 | Batimento Cardíaco Rápido |
| ... | ... | ... | ... |
| 1765 | 0,53 | Padrão Cor 1 e 2 | Ondas de Cor, Cor 1 e 2 |
| 1935 | 0,87 | Cores Sólidas | Azul |
| 1945 | 0,89 | Cores Sólidas | Azul Violeta |
| 1955 | 0,91 | Cores Sólidas | Violeta |
Em Java, o padrão de LED do Blinkin é atribuído usando a convenção de nomenclatura CONSTANT\_CASE. Por exemplo, se você quiser usar o Padrão de Cor Personalizada, Gradiente de Cor, o nome da variável constante é: CP1\_2\_COLOR\_GRADIENT
``` package org.firstinspires.ftc.teamcode; import com.qualcomm.robotcore.eventloop.opmode.LinearOpMode; import com.qualcomm.hardware.rev.RevBlinkinLedDriver; import com.qualcomm.robotcore.eventloop.opmode.TeleOp; import com.qualcomm.robotcore.util.ElapsedTime; @TeleOp public class BlinkInTest extends LinearOpMode { RevBlinkinLedDriver blinkinLedDriver; RevBlinkinLedDriver.BlinkinPattern pattern; @Override public void runOpMode() { blinkinLedDriver = hardwareMap.get(RevBlinkinLedDriver.class, "blinkin"); waitForStart(); while (opModeIsActive()) { if(gamepad1.x){ pattern = RevBlinkinLedDriver.BlinkinPattern.BLUE; blinkinLedDriver.setPattern(pattern); } else if(gamepad1.y){ pattern = RevBlinkinLedDriver.BlinkinPattern.ORANGE; blinkinLedDriver.setPattern(pattern); } else if (gamepad1.b){ pattern = RevBlinkinLedDriver.BlinkinPattern.WHITE; blinkinLedDriver.setPattern(pattern); } else if (gamepad1.a){ pattern = RevBlinkinLedDriver.BlinkinPattern.VIOLET; blinkinLedDriver.setPattern(pattern); } else{ pattern = RevBlinkinLedDriver.BlinkinPattern.BEATS_PER_MINUTE_FOREST_PALETTE; blinkinLedDriver.setPattern(pattern); } } } ``` } #### **Fiação Independente** O Blinkin pode operar no modo autônomo quando não há como gerar um sinal PWM ou quando é necessário apenas um padrão de saída único. Nesse modo, o Blinkin funcionará em Modo Normal sem sinal de entrada (LED azul piscando) e adotará o padrão programado para ausência de sinal (configuração de fábrica é o padrão 29 – Ondas de Cor, Paleta Festiva). O padrão exibido atualmente pode ser alterado a qualquer momento pressionando os botões de subir e descer para navegar pela lista de padrões. A menos que um novo padrão padrão para ausência de sinal seja salvo na memória ao completar o processo de configuração, o Blinkin voltará ao último padrão salvo após um ciclo de energia. [](https://docs.stemos.com.br/uploads/images/gallery/2025-05/JCPimage-6.png) 1. Conecte a uma fonte de energia de 12V que possa fornecer até 5 amperes. 2. Selecione uma fita de LED de 12V ou 5V. 3. Siga as etapas de Configuração para programar um padrão padrão. #### **Ideias de Aplicação para Robótica Competitiva** Adicionar LEDs ao seu robô (ou outro projeto) pode fazer mais do que apenas deixá-los visualmente legais; você pode usar os LEDs para fornecer feedback visual crítico. Aqui estão alguns exemplos: - Programe um botão do controlador para mudar o padrão de saída dos LEDs (por exemplo, 85 – Amarelo sólido) para que o piloto possa usar os LEDs para comunicar ao jogador humano na estação do portal, do outro lado do campo, que o robô está pronto para receber um objeto do jogo. - Se o piloto tiver dificuldade para ver se o robô capturou um objeto do jogo, adicione um sensor na entrada, e a fita de LED pode ser programada para exibir automaticamente um novo padrão quando o objeto for capturado. Assim, o piloto não precisa desviar o olhar do robô para verificar o painel, pois o robô exibirá claramente seu status. - Usando o valor do tempo da partida disponível no software, os LEDs podem ser alterados para um padrão de aviso de tempo (por exemplo, Vermelho sólido) quando faltarem X segundos para o fim da partida. - O robô pode exibir um padrão diferente quando estiver habilitado versus desabilitado, oferecendo um indicador visual mais claro do estado do robô do que o RSL (Robot Signal Light).