Controlador de LED
- Visão geral
- Especificações do Blinkin
- Guia de início
- Solução de problemas
- Exemplos de Aplicação REV ION
- Exemplos de aplicação REV DUO
Visão geral
O Blinkin LED Driver (REV-11-1105) é uma solução compacta e completa que pode controlar LEDs em modo independente, utilizando apenas uma fonte de 12V, ou em modo dinâmico, alterando os padrões por meio do fornecimento de um sinal PWM padrão do tipo servo.

Especificações do Blinkin
Especificações elétricas
| Parâmetro | Min | Tipo | Máx |
|---|---|---|---|
| Voltagem de Operação Recomendada † | 5.5V | 12V | 13.5V |
| Entrada Absoluta de Voltagem †† | 5.2V | - | 25V |
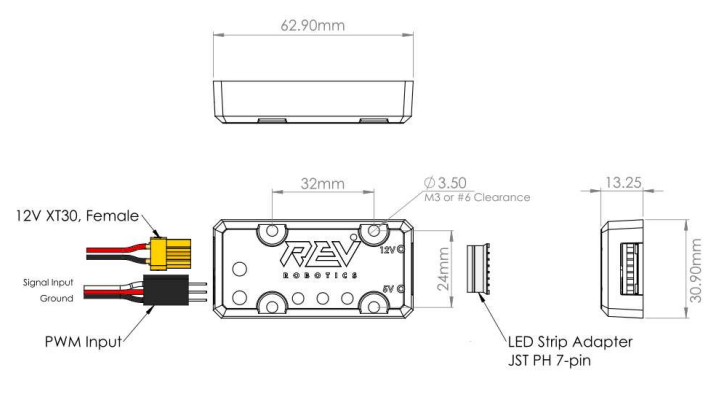
| Entrada de Energia | - | Conector XT30, Macho | - |
| Entrada PWM | - | Conector 3 pinos passo 0,1 pol | - |
| Adaptador de Fita LED | - | Conector JST PH de 7 pinos | - |
| Corrente de Saída LED 12V‡ | - | - | 12A |
| Corrente de Saída LED 5V‡‡ | - | - | 5A |
| Legenda | |
|---|---|
| † | A operação mínima de inicialização para os LEDs de 5V é de 7V. A saída para os LEDs de 12V é alimentada diretamente pela tensão de entrada; portanto, uma tensão de entrada mais baixa ou significativamente mais alta pode impedir o funcionamento adequado e pode causar danos ao dispositivo. |
| †† | A tensão de operação recomendada na entrada é de 5,5V a 13,5V. O intervalo absoluto de tensão de entrada é de 5,2V a 25V — tenha cautela ao exceder a faixa recomendada para evitar danos ao dispositivo. |
| ‡ | Máximo de saída de 12A. Suporta no máximo 300 LEDs em série, ou até duas séries de 300 em paralelo. Equivalente a 10 metros de LEDs em fitas de 60 LEDs por metro. |
| ‡‡ | Saída máxima de 5A. Suporta até 240 LEDs para mais padrões e brilho. Equivalente a 4 metros de LEDs em fitas de 60 LEDs por metro. |
Tipos de fita de LED com suporte
O Blinkin pode controlar tanto fitas de LED RGB de 12V ou Fitas de LED 5V endereçáveis.
| Fita LED RGB de 12V | Esses LEDs estão todos conectados entre si, então a fita estará sempre com uma única cor sólida. No entanto, esse tipo de fita de LED geralmente é mais barato do que os de 5V. O Blinkin foi projetado para LEDs de 12V com ânodo comum, como o REV-11-1197. Essas fitas possuem uma interface de quatro fios e podem ser cortadas a cada três LEDs. |
| Fita LED de 5V | O Blinkin pode controlar fitas de LED do tipo WS2812 de 5V com endereçamento individual, como a REV-11-1198. Esse tipo de fita é mais caro do que o modelo de 12V, mas cada LED individual pode ter uma cor e brilho diferentes, permitindo criar animações muito coloridas. Essas fitas possuem uma interface de três fios e podem ser cortadas entre cada LED. |
Desenho mecânico
Guia de início
Guia de início
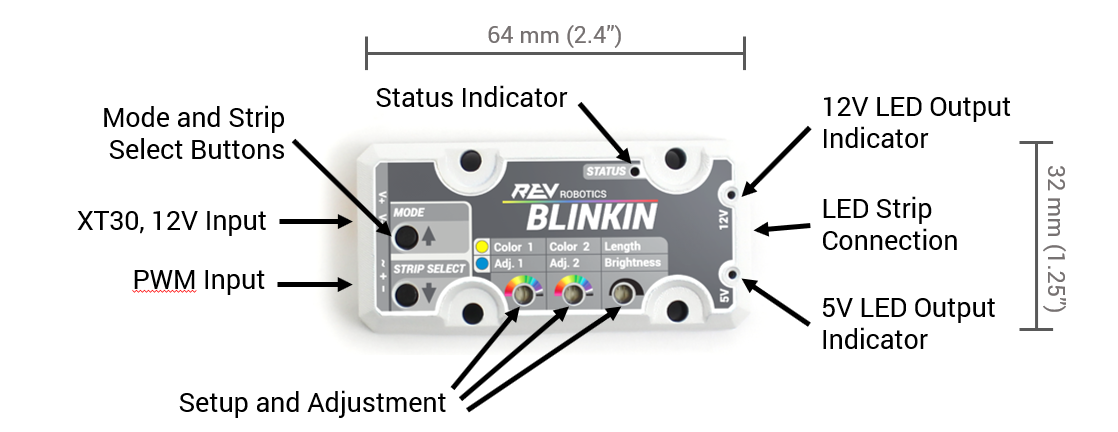
Conexões

| Item | Descrição |
|---|---|
| Botão Modo/Up | Alterna entre o modo normal de funcionamento e o modo de configuração. |
| Botão Seleção da Fita/Down | Alterna o tipo de fita de LED que está sendo controlada. |
| Entrada de Energia XT30 | Conecte a uma bateria nominal de 12V ou outra fonte de energia equivalente. |
| Entrada PWM | Fornece um sinal PWM padrão estilo servo para controlar o padrão/cor da saída dos LEDs. |
| Indicador de Status | Indicador de modo LED RGB. Veja Configuração para cores e significados. |
| Configuração e Ajuste | Três potenciômetros usados para definir as cores da paleta personalizada e o comprimento da fita endereçável no modo de configuração; também ajustam brilho, velocidade e densidade dos padrões durante a operação normal. |
| Indicadores LED 5V/12V | Indicam qual tipo de fita está atualmente selecionada como tipo de saída. |
| Conexão da Fita de LED | Use o conector em pigtail JST PH de 7 pinos para JST SM incluído para conectar à(s) fita(s) de LED. |
Configuração e Ajustes
-
Conecte a alimentação de 12V ao Blinkin usando um cabo XT30.
-
Selecione uma fita de LED endereçável de 12V ou 5V e conecte-a à porta JST PH de 7 pinos usando o Adaptador de Cabo LED Blinkin (REV-11-1196).
-
Se o indicador de saída de LED para a fita 12V/5V conectada não estiver aceso, pressione e segure o botão Selecionar Fita até que o LED indicador correspondente acenda. Sua fita de LED deve estar exibindo o padrão padrão (29 - Ondas de Cor, Paleta Festiva) ou o padrão padrão programado pelo usuário.

- Sem nenhum sinal PWM de entrada ativo (LED de status azul piscando), clicar (pressionar rapidamente) os botões Up (Modo) e Down (Selecionar Fita) mudará o padrão exibido (veja as Tabelas de Padrões de LED). Esse padrão será reiniciado para o padrão padrão após um ciclo de energia, a menos que o padrão padrão seja alterado usando o modo de configuração.

Modo de Configuração
Além dos padrões de paleta de cores fixas pré-programados, o Blinkin pode ser personalizado para usar cores selecionadas pelo usuário e comprimento da fita para criar um visual mais exclusivo. Essas configurações podem ser salvas na memória permanente para que persistam após ciclos de energia.
Características do Modo de Configuração
-
Comprimento da Fita Endereçável — Até 240 LEDs WS2812
-
Cores do Time — Selecione duas entre 22 opções diferentes para representar seu time
-
Padrão Padrão para Ausência de Sinal — Escolha qual padrão será exibido quando não houver sinal PWM de entrada
Passo a Passo do Modo de Configuração
- Ligue o Blinkin conforme descrito em Começando. A fita de LED selecionada não pode ser alterada durante o modo de configuração, então certifique-se de que a fita desejada esteja conectada e funcionando antes de continuar.

- Para entrar no Modo de Configuração, pressione e segure o botão Modo por cerca de 6 segundos; o LED de Status mudará de azul para amarelo. A fita de LED exibirá automaticamente o padrão 75 (Cor 1 e Cor 2: sem mistura), que usa as cores 1 e 2 para auxiliar na configuração.

- Use uma pequena chave de fenda, como a incluída, para ajustar os potenciômetros de Cor 1, Cor 2 e Comprimento:
- Esquerda: Cor 1 – Cor Primária do Padrão
- Meio: Cor 2 – Cor Secundária do Padrão
- Direita: Número de LEDs da fita endereçável (1-240)

- Com nenhum sinal PWM de entrada (LED de Status amarelo piscando), selecione o padrão padrão para ausência de sinal clicando (pressionando rapidamente) os botões Up (Modo) e Down (Selecionar Fita) até o padrão desejado ser exibido.
Deixe o padrão exibido no padrão de teste (75) ao sair para manter o padrão padrão de ausência de sinal inalterado.
Saindo do Modo de Configuração
Salvar e Sair: Pressione e segure os botões Mode e Strip Select por aproximadamente 6 segundos. As cores, o comprimento da fita e o novo padrão padrão para ausência de sinal serão salvos permanentemente na memória EEPROM e permanecerão após desligar e ligar o dispositivo.

Sair sem Salvar: Pressione e segure apenas o botão Mode. Nada será salvo e o Blinkin retornará ao estado salvo anteriormente após um ciclo de energia.

O LED de Status voltará a ficar azul quando o Modo de Configuração for encerrado.
Controle PWM
O Blinkin pode ser controlado por software usando um sinal PWM no estilo padrão de servo. O Blinkin mede a largura do pulso recebido do sinal PWM e, com base nesse valor, seleciona um padrão correspondente da tabela de padrões. As larguras de pulso válidas vão de 1000 μs a 2000 μs.
-
Conecte o Blinkin a uma porta de controle PWM no controlador do robô, como o Control Hub ou o roboRIO, usando um cabo PWM padrão.
-
Usando a linguagem de programação de sua preferência, gere um sinal PWM.
Para uso com o Sistema de Controle FRC e o WPILib, crie um motor do tipo SPARK. (Outros tipos de motores e servos também funcionarão, mas podem alterar os valores associados a padrões específicos.)
- No seu código principal do robô, onde normalmente a potência de saída do motor (ou servo) é atualizada, defina a saída com o valor correspondente ao padrão desejado (consulte as Tabelas de Padrões de LED).
Ajustes de Padrão
Todas as fitas de LED e padrões podem ter seu brilho geral ajustado, e muitos dos padrões também permitem ajustes na densidade e na velocidade do padrão. A Tabela de Padrões de LED detalha quais padrões permitem quais tipos de ajustes.
Enquanto o Blinkin não estiver em Modo de Configuração, siga os passos:
Selecione um padrão que permita ajuste.
Use uma pequena chave de fenda, como a que acompanha o produto, para ajustar os seguintes potenciômetros:
Adj. 1 – Ajuste 1 (geralmente densidade do padrão)
Adj. 2 – Ajuste 2 (geralmente velocidade do padrão)
Brightness – Ajuste de brilho geral
Geralmente, os três potenciômetros ajustam o seguinte durante a Operação Normal: Adj. 1 – Densidade do padrão, largura do padrão ou escurecimento Adj. 2 – Velocidade Brightness – Brilho de toda a fita de LED
Tabela de padrões do LED
Planilha de Padrões de Fita de LED
Para acessar a planilha clique aqui, você será redirecionado para o site do fabricante.
Valores Padrão de Fábrica do Blinkin
| Variável | Valor padrão |
|---|---|
| Color 1 | Sky Blue - 0x0080FF |
| Color 2 | Gold - 0xFFEA00 |
| Comprimento da fita | 60 LEDs |
| Padrão sem sinal | 29 - Ondas de cor, Paleta Festiva |
| Seleção de fita | 5V |
Solução de problemas
Padrões do LED de status
| LED Status | Descrição do LED | Status do Blinkin |
|---|---|---|
 |
Status - Azul Sólido | Operação Normal, Sinal PWM Detectado |
 |
Status - Azul Piscante | Operação Normal, Sinal PWM Não Detectado |
 |
Status - Azul Piscante | Operação Normal, Sinal PWM Não Detectado |
 |
Status - Amarelo Piscante | Modo de Configuração, Sinal PWM Não Detectado |
 |
Status - Azul Sólido com Magenta Piscante | Sinal de Comando Detectado |
|
Saída 12V - Azul Sólido | Fita de LED 12V Selecionada |
|
Saída 5V - Azul Sólido | Fita de LED Endereçável 5V Selecionada |
| | Legenda |
|---|---|
| † | Com alguns comandos, o piscar em magenta pode durar até que o próximo sinal de comando de padrão de LED seja recebido. |
| †† | Se os LEDs de Saída 12V e Saída 5V estiverem ligados ao mesmo tempo, por favor, prossiga com um Reset de Fábrica. |
Solução de problemas geral
LEDs próximos ao final da fita estão mais fracos, com cores incorretas ou se comportando de forma irregular.
Causa Possível: Os LEDs estão excedendo a capacidade de corrente fornecida pelo Blinkin.
Solução: Reduza o brilho da fita, encurte a fita ou use um padrão com menos LEDs acesos ao mesmo tempo.
Causa Possível: Há uma queda de tensão muito grande ao longo do comprimento da fita, fazendo com que os LEDs próximos ao final não recebam tensão suficiente para funcionar corretamente.
Solução: Encurte a fita de LED ou, se for necessário usar mais LEDs, encurte a fita e conecte a parte restante em paralelo com a outra.
Mudança de padrão programada ao iniciar o robô ou após uma perda temporária de energia.
Causa Possível: Um pulso espúrio ao iniciar ou desligar alguns robôs pode coincidir com um código de comando usado durante os testes de fábrica do Blinkin.
Solução:
-
Envie o pulso (listado abaixo) correspondente ao tipo de fita necessário. O LED de Status deve mudar para magenta sólido e o LED de Seleção da Fita permanecerá igual ao que estava antes do comando ser enviado.
- Fita de 5V = 2125 μs
- Fita de 12V = 2145 μs
-
Envie o pulso para um padrão diferente daquele que o Blinkin estava exibindo originalmente. Neste momento, os LEDs devem mudar para a nova fita e exibir o padrão escolhido. O LED de Status voltará a ficar azul sólido e o LED de Seleção da Fita mudará para o tipo de fita selecionado na Etapa 1.
-
Envie o pulso para o padrão desejado originalmente ao seu Blinkin.
A REV Robotics recomenda ter um botão programado em seu controle para resetar o padrão em caso de uma perda de energia temporária.
Incapaz de controlar via PWM
Se um Driver de LED Blinkin consegue executar as sequências de luz pré-instaladas, mas não pode ser controlado por um sinal PWM padrão, como os que controlam um motor servo, verifique se o Blinkin e seu Control Hub ou roboRIO compartilham a mesma fonte de energia ou têm um aterramento elétrico em comum. Na maioria das vezes, corrigir a alimentação de energia do seu Blinkin resolverá esse problema!
Reset de fábrica
O Blinkin pode armazenar configurações personalizadas do usuário na memória para que persistam através dos ciclos de energia (reinicializar). Restaure o Blinkin para as configurações de fábrica usando o seguinte procedimento:
Um reset de fábrica fará com que seu Blinkin recarregue os valores padrão em sua memória permanente. Todas as configurações atuais serão apagadas.
- Desligue o Blinkin
- Pressione e segure os botões Modo e Strip Select

- Ligue o Blinkin

- Espere por cerca de ~2 segundos.
- Solte os botões Modo e Strip Select.
Exemplos de Aplicação REV ION
Fiação usando o sistema de controle da FIRST Robotics Competition
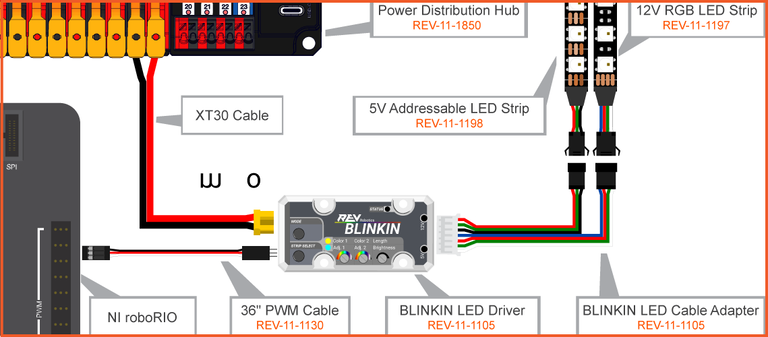
O Driver de LED BLINKIN vem com o Cabo PWM de 36” (REV-11-1130), que pode ser usado para conectar o BLINKIN às portas PWM do NI roboRIO para comunicação. Para alimentar o BLINKIN, você precisa de um cabo XT30 com um conector macho em uma ponta e fios desencapados na outra. Conecte o conector macho ao BLINKIN e as extremidades desencapadas nos canais apropriados do Power Distribution Hub.
O BLINKIN é capaz de controlar tanto uma fita de LED endereçável de 5V (REV-11-1198) quanto uma fita de LED RGB de 12V (REV-11-1197). A imagem abaixo mostra como ambos os tipos de fitas de LED se conectam ao BLINKIN usando o Adaptador de Cabo LED BLINKIN (REV-11-1105).
Sempre certifique-se de ler as regras relevantes e usar fios com bitola adequada antes de utilizar qualquer coisa no seu robô de competição.
Após conectar seu Blinkin ao robô, siga as instruções de configuração e as orientações para controle PWM conforme desejado.
Exemplo de Programação para FIRST Robotics Competition
No Sistema de Controle FRC, a faixa de saída dos motores varia dependendo do tipo de controlador de motor que foi inicializado. A faixa do pulso de saída é ajustada a partir da potência solicitada pelo usuário, que varia de -1 a 1, para a faixa definida para cada tipo de controlador de motor.
| Controlador de motores | Pulso Mín. do comprimento de saída (us) | Pulso Máx. do comprimento de saída (us) |
|---|---|---|
| SPARK | 1000 | 2000 |
| SRX | 997 | 2004 |
| Talon SR | 989 | 2037 |
| Jaguar | 697 | 2322 |
O tipo de controlador de motor SPARK possui uma saída que corresponde diretamente à entrada do Blinkin, o que torna a conversão da faixa de código de -1 a 1 para a faixa de entrada do Blinkin de 1000-2000 μs a mais simples. Outros tipos de controle, incluindo servo, do roboRIO também podem ser usados, mas o usuário precisará ajustar a escala da faixa de entrada corretamente para garantir que está enviando apenas uma faixa PWM válida e para poder selecionar o padrão de LED desejado.
Como exemplo, o trecho das Tabelas de Padrões de LED inclui o valor correto de saída do motor SPARK para cada padrão. A tabela abaixo lista os valores de controle do motor associados a padrões específicos:
Exemplo de Valores de Controle Spark baseados na Tabela de Padrões de LED
| Cor do LED/Padrão | Valor de saída do motor |
|---|---|
| Arco-íris com Cores do Oceano | -0.95 |
| Scanner Larson (Semelhante a um Cylon) | -0.35 |
| Batimento cardíaco rápido na Cor 1 do Time selecionada pelo usuário | 0.07 |
| Azul Sólido | 0.87 |
Trecho das Tabelas de Padrões de LED
| Largura do Pulso (μs) | Valor roboRIO SPARK | Tipo de Padrão | Padrão/Paleta |
|---|---|---|---|
| 1005 | -0,99 | Padrão com Paleta Fixa | Arco-íris, Paleta Rainbow |
| 1015 | -0,97 | Padrão com Paleta Fixa | Arco-íris, Paleta Festiva |
| 1025 | -0,95 | Padrão com Paleta Fixa | Arco-íris, Paleta Oceano |
| ... | ... | ... | ... |
| 1325 | -0,35 | Padrão com Paleta Fixa | Scanner Larson, Vermelho |
| ... | ... | ... | ... |
| 1515 | 0,03 | Padrão Cor 1 | Batimento Cardíaco Lento |
| 1525 | 0,05 | Padrão Cor 1 | Batimento Cardíaco Médio |
| 1535 | 0,07 | Padrão Cor 1 | Batimento Cardíaco Rápido |
| ... | ... | ... | ... |
| 1765 | 0,53 | Padrão Cor 1 e 2 | Ondas de Cor, Cor 1 e 2 |
| 1935 | 0,87 | Cores Sólidas | Azul |
| 1945 | 0,89 | Cores Sólidas | Azul Violeta |
| 1955 | 0,91 | Cores Sólidas | Violeta |
Ideias de Aplicação para Robótica Competitiva
Adicionar LEDs ao seu robô (ou outro projeto) pode fazer mais do que apenas deixá-los parecerem legais; você pode usar LEDs para fornecer feedback visual crítico. Aqui estão alguns exemplos:
-
Programe um botão do controlador para alterar o padrão de saída do LED (por exemplo, 85 - Amarelo Sólido) e o piloto pode usar os LEDs para se comunicar com o jogador humano em uma estação de portal através do campo, indicando que o robô está pronto para receber um objeto de jogo.
-
Se o motorista tiver pouca visibilidade para ver se o robô adquiriu um objeto de jogo, adicione um sensor à entrada e a fita de LED pode ser programada para exibir automaticamente um novo padrão quando o objeto for adquirido. O motorista nunca precisa desviar os olhos do robô para verificar o painel porque o robô exibirá claramente seu status.
-
Usando o valor do tempo de jogo disponível no software, os LEDs podem ser alterados para um padrão de aviso de tempo (por exemplo, Vermelho Sólido) com X segundos restantes em uma partida.
-
O robô pode exibir um padrão diferente quando habilitado versus desabilitado, o que fornece um indicador mais visível do estado do robô do que o RSL (indicador de estado da luz).
Exemplos de aplicação REV DUO
Programação para FIRST Tech Challenge
Um dos pedidos mais comuns dos usuários do Control Hub é como usar o Blinkin para sinalizar ao piloto as diferentes ações que o robô está realizando. O código básico abaixo mostra como usar o SDK para programar o Blinkin para diferentes ações. Quando um botão específico do gamepad é pressionado, o LED acende em uma cor sólida; se nenhum botão estiver pressionado, o LED exibe o padrão Beats Per Minute com a Paleta Floresta.
Blocks

OnBot Java
Em Java, o padrão de LED do Blinkin é atribuído usando a convenção de nomenclatura CONSTANT_CASE. Por exemplo, se você quiser usar o Padrão de Cor Personalizada, Gradiente de Cor, o nome da variável constante é: CP1_2_COLOR_GRADIENT
package org.firstinspires.ftc.teamcode;
import com.qualcomm.robotcore.eventloop.opmode.LinearOpMode;
import com.qualcomm.hardware.rev.RevBlinkinLedDriver;
import com.qualcomm.robotcore.eventloop.opmode.TeleOp;
import com.qualcomm.robotcore.util.ElapsedTime;
@TeleOp
public class BlinkInTest extends LinearOpMode {
RevBlinkinLedDriver blinkinLedDriver;
RevBlinkinLedDriver.BlinkinPattern pattern;
@Override
public void runOpMode() {
blinkinLedDriver = hardwareMap.get(RevBlinkinLedDriver.class, "blinkin");
waitForStart();
while (opModeIsActive()) {
if(gamepad1.x){
pattern = RevBlinkinLedDriver.BlinkinPattern.BLUE;
blinkinLedDriver.setPattern(pattern);
}
else if(gamepad1.y){
pattern = RevBlinkinLedDriver.BlinkinPattern.ORANGE;
blinkinLedDriver.setPattern(pattern);
}
else if (gamepad1.b){
pattern = RevBlinkinLedDriver.BlinkinPattern.WHITE;
blinkinLedDriver.setPattern(pattern);
}
else if (gamepad1.a){
pattern = RevBlinkinLedDriver.BlinkinPattern.VIOLET;
blinkinLedDriver.setPattern(pattern);
}
else{
pattern = RevBlinkinLedDriver.BlinkinPattern.BEATS_PER_MINUTE_FOREST_PALETTE;
blinkinLedDriver.setPattern(pattern);
}
}
}
}
Fiação Independente
O Blinkin pode operar no modo autônomo quando não há como gerar um sinal PWM ou quando é necessário apenas um padrão de saída único. Nesse modo, o Blinkin funcionará em Modo Normal sem sinal de entrada (LED azul piscando) e adotará o padrão programado para ausência de sinal (configuração de fábrica é o padrão 29 – Ondas de Cor, Paleta Festiva).
O padrão exibido atualmente pode ser alterado a qualquer momento pressionando os botões de subir e descer para navegar pela lista de padrões. A menos que um novo padrão padrão para ausência de sinal seja salvo na memória ao completar o processo de configuração, o Blinkin voltará ao último padrão salvo após um ciclo de energia.

-
Conecte a uma fonte de energia de 12V que possa fornecer até 5 amperes.
-
Selecione uma fita de LED de 12V ou 5V.
-
Siga as etapas de Configuração para programar um padrão padrão.
Ideias de Aplicação para Robótica Competitiva
Adicionar LEDs ao seu robô (ou outro projeto) pode fazer mais do que apenas deixá-los visualmente legais; você pode usar os LEDs para fornecer feedback visual crítico. Aqui estão alguns exemplos:
-
Programe um botão do controlador para mudar o padrão de saída dos LEDs (por exemplo, 85 – Amarelo sólido) para que o piloto possa usar os LEDs para comunicar ao jogador humano na estação do portal, do outro lado do campo, que o robô está pronto para receber um objeto do jogo.
-
Se o piloto tiver dificuldade para ver se o robô capturou um objeto do jogo, adicione um sensor na entrada, e a fita de LED pode ser programada para exibir automaticamente um novo padrão quando o objeto for capturado. Assim, o piloto não precisa desviar o olhar do robô para verificar o painel, pois o robô exibirá claramente seu status.
-
Usando o valor do tempo da partida disponível no software, os LEDs podem ser alterados para um padrão de aviso de tempo (por exemplo, Vermelho sólido) quando faltarem X segundos para o fim da partida.
-
O robô pode exibir um padrão diferente quando estiver habilitado versus desabilitado, oferecendo um indicador visual mais claro do estado do robô do que o RSL (Robot Signal Light).