Aplicações de exemplo
FRC
Sempre certifique-se de ler as regras relevantes e utilizar fiação de calibre apropriado antes de utilizar qualquer componente no seu robô de competição.
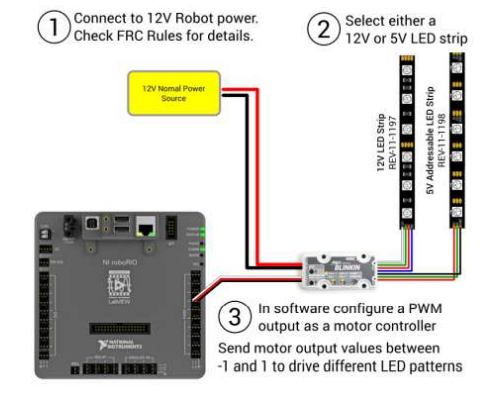
Após conectar o Blinkin ao seu robô, siga as instruções de configuração na Seção 2.2 e as instruções de controle PWM na Seção 2.3 conforme desejado.
FTC
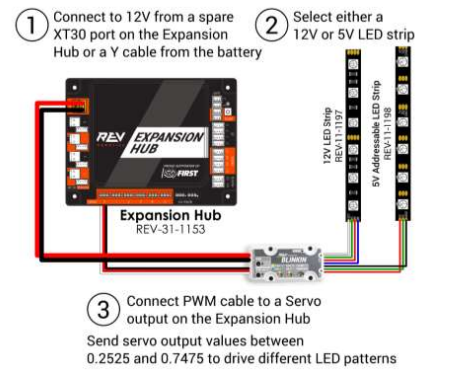
Conexão Solo
O Blinkin pode operar em um modo independente quando não há maneira de gerar um sinal PWM, ou quando apenas um padrão de saída é necessário. Nesse modo, o Blinkin estará operando no Modo Normal sem sinal de entrada (LED azul piscando) e será restaurado para o padrão programado sem sinal de entrada (configuração de fábrica é o padrão 29 - Color Waves, Party Palette).
O padrão atualmente exibido pode ser alterado a qualquer momento pressionando os botões para cima e para baixo para percorrer a lista de padrões (Seção 5). A menos que um novo padrão de teste sem sinal padrão seja salvo na memória ao concluir o modo de configuração, o Blinkin retornará ao último padrão salvo após um ciclo de energia.

Aplicações de ideias para competições de robô
Adicionar LEDs ao seu robô (ou outro projeto) pode fazer mais do que apenas deixá-los parecerem legais; você pode usar LEDs para fornecer feedback visual crítico. Aqui estão alguns exemplos:
-
Programe um botão do controlador para alterar o padrão de saída do LED (por exemplo, 85 - Amarelo Sólido) e o piloto pode usar os LEDs para se comunicar com o jogador humano em uma estação de portal através do campo, indicando que o robô está pronto para receber um objeto de jogo.
-
Se o motorista tiver pouca visibilidade para ver se o robô adquiriu um objeto de jogo, adicione um sensor à entrada e a fita de LED pode ser programada para exibir automaticamente um novo padrão quando o objeto for adquirido. O motorista nunca precisa desviar os olhos do robô para verificar o painel porque o robô exibirá claramente seu status.
-
Usando o valor do tempo de jogo disponível no software, os LEDs podem ser alterados para um padrão de aviso de tempo (por exemplo, Vermelho Sólido) com X segundos restantes em uma partida.
-
O robô pode exibir um padrão diferente quando habilitado versus desabilitado, o que fornece um indicador mais visível do estado do robô do que o RSL (indicador de estado da luz).