2025 - Conheça os itens do Kit Iniciante para FRC
O Kit Iniciante para FRC é um kit desenvolvido pela AndyMark, com customizações da stemOS, para atender equipes da FRC inciantes, de forma a terem materiais para treinar e estudar antes de receberem seu kit of parts oficial, disponibilizado apenas no dia do kickoff. Este material é baseado do documento desenvolvido em 2020 em parceria com a equipe Under Control #1156.
Controles
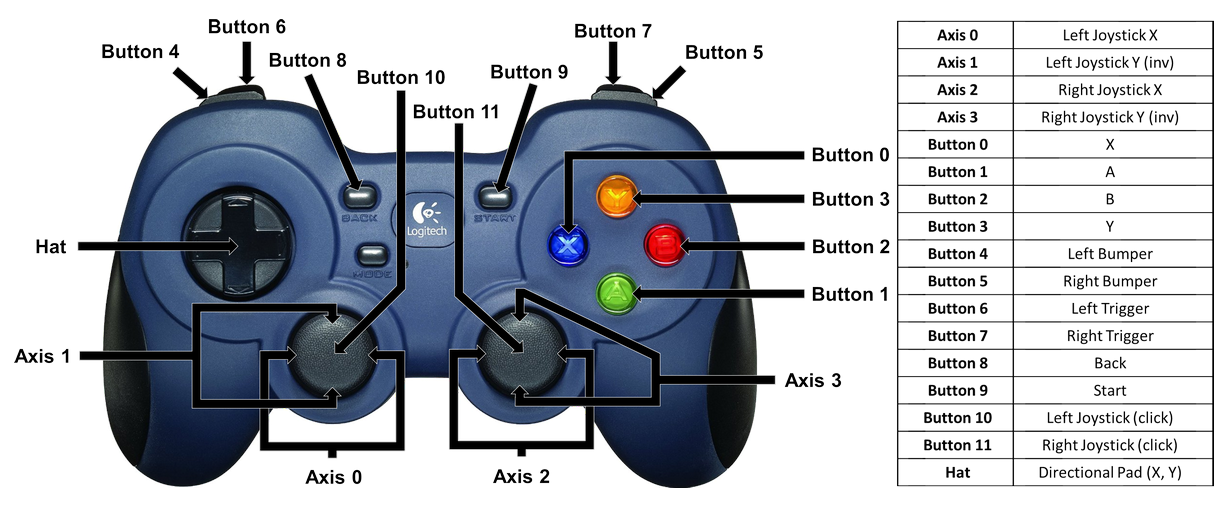
Logitech F310

Usado como a interface entre o piloto e o robô. Sendo possível utilizar até dois controles.
Usualmente um para a tração e outro para mecanismos, como atiradores, pegadores ou garras.

Driver Station da equipe Spectrum #3847
Guias
Para mais informações, clique aqui
Link para o página do fornecedor
Sistema de Controle
NI RoboRIO 2.0
O RoboRIO é o cérebro do robô, ele é responsável por armazenar o código e coordenar todas ações da máquina, assim, deve-se exercitar cuidado máximo ao manuseá-lo, sendo bastante sensível a lascas de alumínio.
Ele é capaz de exercer diversas operações matemáticas complexas, o que é essencial para que a máquina tenha o melhor desempenho possível.
Há várias interfaces, como PWM, CAN, SPI e barramentos digitais e analógicos.

Lembrete: Antes de utilizar seu roboRIO você deve atualizá-lo para o firmware e imagem mais recentes (role até o final da página para encontrar o tutorial).
Ele pode ser programado em LabVIEW, Java e C++.
Descrição de cada interface do roboRIO

- Onde se conecta os cabos que energizam o Roborio, vindos da PDP
- Para conectar o cabo USB A para USB B (conexão com o computador)
- Entrada para cartão microSD
- Host USB, podendo ser usados para câmeras e co-processadores
- Para conectar o Rádio ou computador via Ethernet
- Porta de comunicação tipo SPI
- Sinalizam por meio de cores o status do RoboRIO
- Portas para comunicação PMW
- Para auxiliar a fixar o RoboRIO no robô
- Reset - Reinicia o RoboRIO; User - Botão programável
- Barramento para leitura analógica
- Porta para conectar relés (Exemplo: Spike)
- Para conectar a RSL
- Barramento de leitura e escrita digital
- Porta para circuitos adicionais e expanção(MXP)
- Porta para comunicação via RS232
- Entrada para a comunicação tipo I2C
- Entrada para a comunicação tipo CAN (início da linha CAN)
Guias
Link para a página do fornecedor
Documentação oficial da FIRST e WIP sobre o RoboRIO e LabVIEW - a stemOS em colaboração com a equipe Under Control 1156, traduziu o material para português.
Tutorial para atualizar o firmware e a imagem
Power Distribution Hub (PDH)
O Power Distribution Hub (PDH), é o coração do robô. Ele recebe a energia vinda diretamente da bateria e a distribui conforme a necessidade entre os sistemas do robô.
Nele existem várias aberturas nas laterais, onde devem ser encaixados os cabos dos componentes do robô. No centro dele há várias aberturas onde devem ser encaixados os Fusíveis.
{kind=link}
Nas entradas menores, devem estar as conexões para os componentes mais importantes do robô: o RoboRIO, a MPM e a PH.

Lembrete: Antes de utilizar se PDH, você deve atualizá-la para o firmware mais recente disponível no REV Hardware Client.
Antes de utilizá-la, fique atento ao link abaixo, onde encontrará a página do PDH no site da REV.
Ali você encontrará os recursos disponíveis, como o manual, seu projeto em CAD, documentação (em inglês), e firmware.
Guias
Fusível
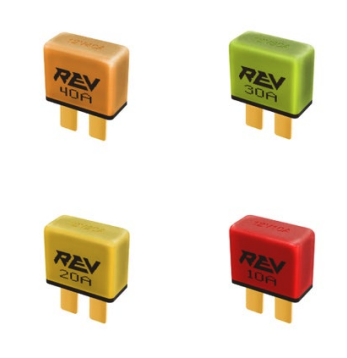
Fusível de reset automático, serve para limitar a corrente que está passando da PDH para, por exemplo, um controlador de motor, protegendo-o de possíveis curto-circuitos ou sobre-correntes.
É importantíssimo saber o fusível adequado para cada componente eletrônico antes de ligá-lo.
Se você está escutando um estalo vindo da sua PDH, é provável que este fusível esteja abrindo devido a algum curto.

Lembrete: A corrente de abertura do fusível delimita a espessura dos cabos que devem ser conectados naquela porta da PDH. Preste bastante atenção nisso e faça uma boa leitura das regras elétricas no manual!
Guias
Link da página do fabricante do fusível de 30A
Link da página do fabricante do fusível de 40A
Bateria 12V
Está bateria é do padrão de Jet-Ski, 12V e 18Ah. São necessários uma série de cuidados ao manipulá-la.
Ela é grande e pesada, logo, tenha sua localização em mente quando projetar o seu robô!
E lembre-se, um robô de FRC consome altas correntes, por isso é imprescindível manter a bateria sempre carregada e, se necessário, trocá-la por uma mais carregada.
Equipes normalmente levam pelo menos 2 baterias para eventos de competição.

Dependendo do consumo de corrente do seu robô, ela deve durar entre 20 a 50min. Você pode verificar a tensão da bateria na Driver Station do seu robô.

Se o seu robô está parado e a tensão está abaixo de 12V, está na hora de colocar a bateria para carregar. Uma bateria descarregada altera significativamente o desempenho do seu robô.
Guias
Carregador de Baterias
Quando a carga da bateria estiver completa (indicado por uma luz verde no carregador) retire-a do carregador. Sobrecarregar a bateria pode diminuir severamente a vida útil dela!
Desconecte a bateria do carregador ANTES de tirá-lo da tomada. Deixar a bateria ligada ao carregador com ele fora da tomada faz com que ela perca um pouco da carga.
Uma carga típica de uma bateria descarregada leva pelo menos 3 horas.

Guias
Link para a página do fabricante
Rádio
O VH-109 (rádio) é o componente responsável por realizar a comunicação entre o robô e o Field Management System, conhecido como FMS, este é o sistema que faz com que toda a quadra funcione e contabilize as pontuações, além de garantir que os robôs operem conforme o esperado como por exemplo durante o período autônomo e o fim da partida.
A partir da temporada REEFSCAPE a FRC conta com um novo rádio e um novo sistema de comunicação que utiliza a tecnologia Wifi 6 para reduzir a latência e melhorar a performance da rede usando MU-MIMO.

Guias
Link para página do fabricante
SPARK MAX
O SPARK MAX é o controlador de motores para motores escovados e não escovados DC, ele conta com conexões PWM, CAN e USB.
Ele é compatível com os motores:
- NEO Brushless Motor
- NEO 550 Brushless Motor
- CIM/Mini CIM Motors
- 775Pro/Redline Motors
- BAG Motor
- Virtualmente qualquer motor escovado DC de 12V**
- Não escovado DC
- Escovado DC

Guias
Link da página do fabricante Link para documentação
Motores
57 Sport Gearbox
O 57 Sport inclui hardware de montagem para qualquer motor das séries 500 ou 700, incluindo o AndyMark RedLine, o VexPro 775pro, o AndyMark RS775-5, o BaneBots RS775, o BaneBots RS550 e o AndyMark NeveRest.

A caixa com redução de 4:1 por possuir um RPM mais alto e baixo torque é melhor alocada em atiradores e coletores. Já a de 64:1 é melhor alocada em braços e escaladores.

RedLine com uma Sport Gearbox 4:1 usada na temporada de 2020 pela equipe Under Control em seu atirador para tracionar um rolete. Para acessar o documento de como montar a caixa de redução e acoplar o motor (RedLine) clique aqui.

Guias
Documento de especificações mecânicas
Link para a página do fabricante
Sport Gearbox Motor Kit
Este kit inclui o equipamento necessário para acoplar o motor Redline em uma Sport Gearbox. O motor já possui um pinhão (engrenagem) de 16 dentes pré instalado

Sport Gearbox Motor Mount - CIM/NEO
Este kit inclui o equipamento necessário para acoplar os motores CIM ou NEO em uma Sport Gearbox

Guias
Manual de montagem do motor 57 Sport
Link para a página do fabricante
Snow Blower
O Snow Blower Motor é um motor pequeno de baixo RPM, ótimo para trabalhos em espaços apertados. Ele possui um eixo de saída de 1⁄2 polegada hexagonal.
Possui motor e caixa de redução (do tipo sem-fim) juntas para utilizar melhor o espaço. Possui um furo #10-32 no final do eixo para facilitar na hora de prender um hub ou coroa.

Potência máxima: 20 watts
Velocidade sem carga: 100 RPM
Porta recomendada na PDP:30A/20A
Usado na construção do Everybot da equipe 118 no jogo de 2019 (Deep Space) para levantar e baixar a espátula que manipulava o hatch panel.

Podendo ser conectado no Bracket (am-2373).
Guias
Documento especificações metricas
Link para página do fabricante
Bracket - SnowBlower Motor
O Bracket - Snow Blower Motor é um suporte que permite montar mais facilmente um Snow Blower Motor (am-2235a) no seu robô.

Utilizando o desenho técnico do link abaixo, você pode reproduzir essa peça utilizando alumínio ou policarbonato.
Guias
Documento especificações dimensionais
Link para a página do fabricante
RedLine com pinhão de 16 dentes
Com uma classificação de potência de até 363W, este motor é capaz de fornecer alta potência em um formato pequeno e leve. Ele é refrigerado a ar e possui rolamentos internos.
É melhor utilizado em aplicações de alta velocidade, nas quais o motor não fica parado por longos períodos, como atiradores e coletores.

Também pode ser utilizado em mecanismos que necessitam de alto torque, porém uma redução maior será necessária

Na temporada de 2020 a equipe #1156 utilizou este motor para seu atirador de bolas.
Este motor já vem preparado para ser utilizado junto a uma caixa planetária Sport.
Potência máxima: 363 watts
RPM livre: 21020 RPM
Porta recomendada na PDP:30A/20A
Guias
Para saber mais sobre potencia, torque e eficiência clique aqui link do CAD
Documento especificações dimensionais
Link para a página do fabricante
Neo Motor
Sobre o motor
O Neo Motor é um dos motores mais populares na FRC hoje em dia! Sendo compacto, com tecnologia Brushless e com seus encoders internos, ele se torna uma ótima opção para qualquer tipo de uso.

Com sua potência típica de 380W, é capaz de ser utilizado tanto na tração, trazendo maior aceleração na arrancada, quanto em um sistema como atirador, que precisa de velocidade e consistência, já que também é pode atingir até 5676 RPM.
Outra grande vantagem é seu encoder embutido. Com uma resolução de 42 ticks por revolução, pode ser utilizado no lugar de encoders externos para programar ações autônomas da tração e movimentos de outros mecanismos com grande precisão.
Exemplos de uso
Como dito, ele é um grande curinga, já que tem suas especificações mais do que ótimas para desempenhar qualquer tarefa. Seguem alguns exemplos de uso do motor em robôs.

Na primeira imagem o motor está instalado em um módulo swerve, responsável pela tração do robô.

Nesta segunda imagem, ele está como principal atuador no sistema de atirar bolas de um robô projetado para o ano de 2022, acelerando a roda principal.
Mais recursos
Para mais informações sobre o Neo Motor, clique aqui!
Chassis
Caixa de Redução
Para controlar o chassis, você precisará de um sistemade controle que pode ser construído com o conjunto de eletrônicos incluso no seu kit. É recomendado que sejam utilizados quatro motores CIM (am-0255) para movimentar o chassis, pois eles possuem a potência e confiabilidade adequada para o sistema de tração. Você também precisará de pelo menos uma bateria (am-3062) e um carregador 6 Amp charger (am-2555).


O Kit of Parts Chassis inclui duas Toughbox Mini que é a caixa de redução para a tração. A redução da caixa é 10.71:1 e, se utilizada com as rodas de 6” e 2 motores CIM fornecidos no kit, resultam em uma velocidade na roda de 4m/s, ou 12.98 ft/s como é comumente utilizado na FRC. O que vai proporcionar uma ótima relação entre velocidade e torque para o seu robô.
Guias
Link para a página do fabricante
Kit of Parts Chassis
O Kit of Parts Chassis é um kit para construir o sistema de tração do robô, feito com chapas dobradas da família AM14U5. Ele pode ser construído em uma configuração quadrada, sem cortar nenhum componente, ou permite que o usuário corte o comprimento e/ou a largura do chassis para se tornar uma versão longa ou larga que se encaixa em diferentes restrições de tamanho de cada ano específico.


Link para a página do fabricante
Link do vídeo guia de montagem
Guias
Arquivos CAD
Rodas
O Kit of Part Chassis também inclui 6x 6” HiGrip Wheels, rodas que fornecem tração superior para o movimento do robô e são utilizadas para aplicações de alto impacto e velocidade. Para tracionar esta roda utiliza-se a polia e correia dentada inclusa no kit.
Estas rodas possuem uma dureza de 80A* o que entrega uma vida útil longa e um alto coeficiente de atrito.

Guias
Link para documentação completa
Fixação da bateria
O Battery Mount Kit é um suporte para bateria. Ele pode ser montado nos chassis da família AM14U5 ou em qualquer outro. O elástico prende as baterias na bandeja e mantém a bateria segura e protegida.

A foto abaixo é um exemplo de uma das formas de utilizar o Kit no chassis AM14U5 recebido no kit.

Historicamente, equipes enfrentam falhas em seus robôs por não fixarem a bateria de maneira adequada. Esse ponto requer atenção e conferência antes das partidas.
Guias
Link do produto na página do fabricante
Link do arquivo CAD
Link do Manual de Montagem
Tração
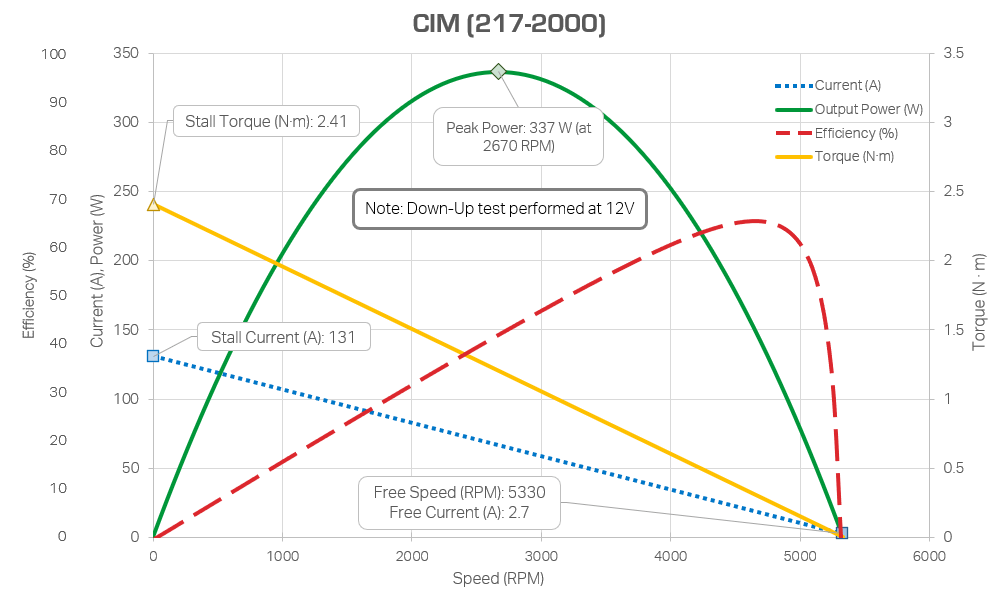
O CIM é um dos mais confiáveis motores fornecidos às equipes de FRC. Normalmente são utilizados na tração - composta pelo chassis, rodas e a caixa de redução - onde seu poder e confiabilidade são essenciais.

Esta é uma caixa de redução personalizada utilizada na tração do robô da equipe Under Control em 2018 utilizando CIMs. O CIM pode ser conectado diretamente na caixa de redução Toughbox que vem com este kit.

RPM livre: 5,330 rpm
Potência máxima: 337 W
Porta recomendada na PDP: 40A
Guias
Para saber mais sobre potência, torque e eficiência clique aqui Link do CAD
Documento especificações metricas
Link para página do fabricante
Ferramentas
Chave Fixa de 3⁄8” x 7/16” e 1⁄2” x 9/16”
A chave fixa, também conhecida pelo nome de chave de boca, é utilizada para apertar ou afrouxar porcas e parafusos de perfil quadrado ou sextavado.

Estas chaves específicas devem ser utilizadas na montagem do AM14U5 Pode ser comprado em qualquer loja que venda ferramentas mecânicas.
As que você está recebendo são em unidades imperiais, devendo ser utilizadas apenas com parafusos e porcas com medidas em polegadas.
No Brasil o padrão é utilizarmos o sistema métrico de medidas, porém como o kit é Americano você encontrará muitos equipamentos que utilizam o sistema imperial.
Chave Allen Abaulada de 5/32 pol
A Chave Allen é uma ferramenta comumente conhecida como chave sextavada. Ela serve para fixar parafusos e outros tipos de fixadores.

Costuma ter forma de L, com uma ponta hexagonal em cada extremidade.
Pode ser comprado em qualquer loja que venda ferramentas mecânicas.
Esta chave específica deve ser utilizada na montagem do AM14U5.

Soquete Tipo Canhão
O soquete canhão é utilizado em parafusadeiras elétricas com encaixes sextavados, com encaixe, podendo ser utilizado em parafusos ou porcas com cabeça sextavada ou estriada.

Pode ser comprado em qualquer loja que venda ferramentas mecânicas.
Estes soquetes específicos serão necessários para facilitar a montagem do AM14U5.
Cabos
Cabo de bateria e Cabo de energia do robô
É o cabo que conecta o polo negativo na PDP e o positivo no Circuit Breaker 120A, recebendo a energia vinda da bateria através do conector.

Cabo de energia do robô vermelho - 5"
Serve para conectar o Breaker à PDP (polo positivo).

Cabo preto e vermelho - 1m x 1mm2 e 5m x 4mm2"
Ambos são fios (de espessuras e tamanhos diferentes) que podem ser utilizados para diversas funções no sistema de controle.

Tabela com as espessuras de cabos que devem ser utilizadas de acordo com a limitação de corrente de cada circuito(2023).
Para encontrar as regras de uso de cabos e fiação leia a seção 9 do manual, especificamente a seção 9.6 do manual da temporada Charged Up que pode ser encontrado abaixo.
Guias
Manual de regras de construção do robô (Charged Up)
Passive PoE Injector
O Passive PoE Injector, permite que, ao invés de ter um cabo Ethernet e um cabo de energia conectado ao rádio, separados, se possa utilizar somente uma entrada, sendo mais seguro que o outro conector de energia.

A imagem abaixo demonstra como utilizá-lo

Guias
Cabo Ethernet
O cabo Ethernet pode ser utilizado como uma linha direta entre o computador e o RoboRIO, podendo utilizá-lo para passar a programação e controlar o robô.
Ele também é utilizado para conectar o rádio ao RoboRIO.
